Файл: Проект модернизации главного привода токарного патронноцентрового станка на базе станка с чпу модели 2А135.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 06.11.2023
Просмотров: 268
Скачиваний: 5
СОДЕРЖАНИЕ
-к сокращению штучного времени;
-повышение точности обработки и формообразования;
-высокий КПД главных и вспомогательных механизмов (приводов).
вида модернизированного станка; кинематической схемы; шпиндельного узла; коробки скоростей.
также автоматически устанавливать необходимые режимы обработки с учетом изменяющихся условий.
вида модернизированного станка; кинематической схемы; шпиндельного узла; коробки скоростей.
1. Описание устройства и работы станка-прототипа и основных его узлов
1.1. Назначение и краткое описание станка
1.2. Технические данные и характеристика станка
1.3. График частот вращения привода главного движениябазового станка и ее описание
1.4. Кинематическая схема привода главного движениябазового станка и ее описание
2 Техническое предложение на проектируемый станок
2.1. Основные условия и исходные данные для разработки
2.2 Определение базовых межосевых расстояний и условияих сохранения в разрабатываемом приводе
2.3 Выбор типа электродвигателя и его характеристик
2.4. Построение графика частот вращения приводас бесступенчатым регулированием
2.6. Построение графика мощности на шпинделе

Затем на строящемся графике мощности по значениям
 и
и  наносится точка A. В примере
наносится точка A. В примере  (рис. 6), а
(рис. 6), а
5. Соединяем точку А с перекрестием горизонтальной и вертикальной линий, определяемых известными значениями
 кВт и
кВт и  об/мин. Полученная наклонная линия будет характеризовать изменение мощности на шпинделе от частоты его вращения.
об/мин. Полученная наклонная линия будет характеризовать изменение мощности на шпинделе от частоты его вращения.6. Проводим утолщенные горизонтальные линии, определяющие работу привода с постоянной мощностью на всех 3 ступенях переключения механических передач. В рассматриваемом примере 2 ступень частично перекрывает 1 и 3 ступени. Линии перекрывающихся ступеней следует проводить с минимально возможным отступлением от вспомогательной горизонтальной линии.
| Рис. 8. Зависимость мощности на шпинделе станка мод. 2А135 от частоты его вращения |
4Кинематический расчёт привода главного движения Основные данные и требования к разрабатываемому приводу
Основным требованием при проектировании бесступенчатого привода главного движения (взамен ступенчатого) является использование корпуса узла, в котором будут располагаться элементы привода, от базового станка.
При этом должны остаться неизменными:
1. Конфигурация, габаритные и присоединительные размеры корпуса базового узла, а также толщина стенок корпуса.
2. Количество валов в корпусе и межцентровые расстояния между ними.
3. Расположение подвижных (ого) блоков (а) шестерен на тех же валах, что и в приводе базового станка.
При этом желательно (если позволят результаты прочностного расчета) использовать валы, подшипники, крышки, муфты и другие элементы от базового привода без всяких изменений. Это, с одной стороны, объясняется экономической целесообразностью, с другой – необходимостью присоединения проектируемого узла к базовым поверхностям станка, сохранив при этом характерные размеры станка (высоту центров, расстояние от оси шпинделя до стойки и т. п.).
Определение расчетных частот вращения валов привода
Расчетные частоты вращения валов необходимы для определения на каждом из них величин крутящих моментов. В свою очередь, крутящие моменты являются основным силовым параметром, необходимым для выполнения прочностных расчетов с целью определения модулей и размеров зубчатых колес, диаметров валов, типоразмеров подшипников, размеров шлицевых и шпоночных соединений и т. п.
Расчетные частоты вращения валов в бесступенчатых приводах целесообразно определять следующим образом:
1. Определяется опорная частота вращения на последнем валу привода – шпинделе (формула 1.1 [3]):
где
 и
и  – соответственно минимальная и максимальная частоты вращения шпинделя базового станка.
– соответственно минимальная и максимальная частоты вращения шпинделя базового станка.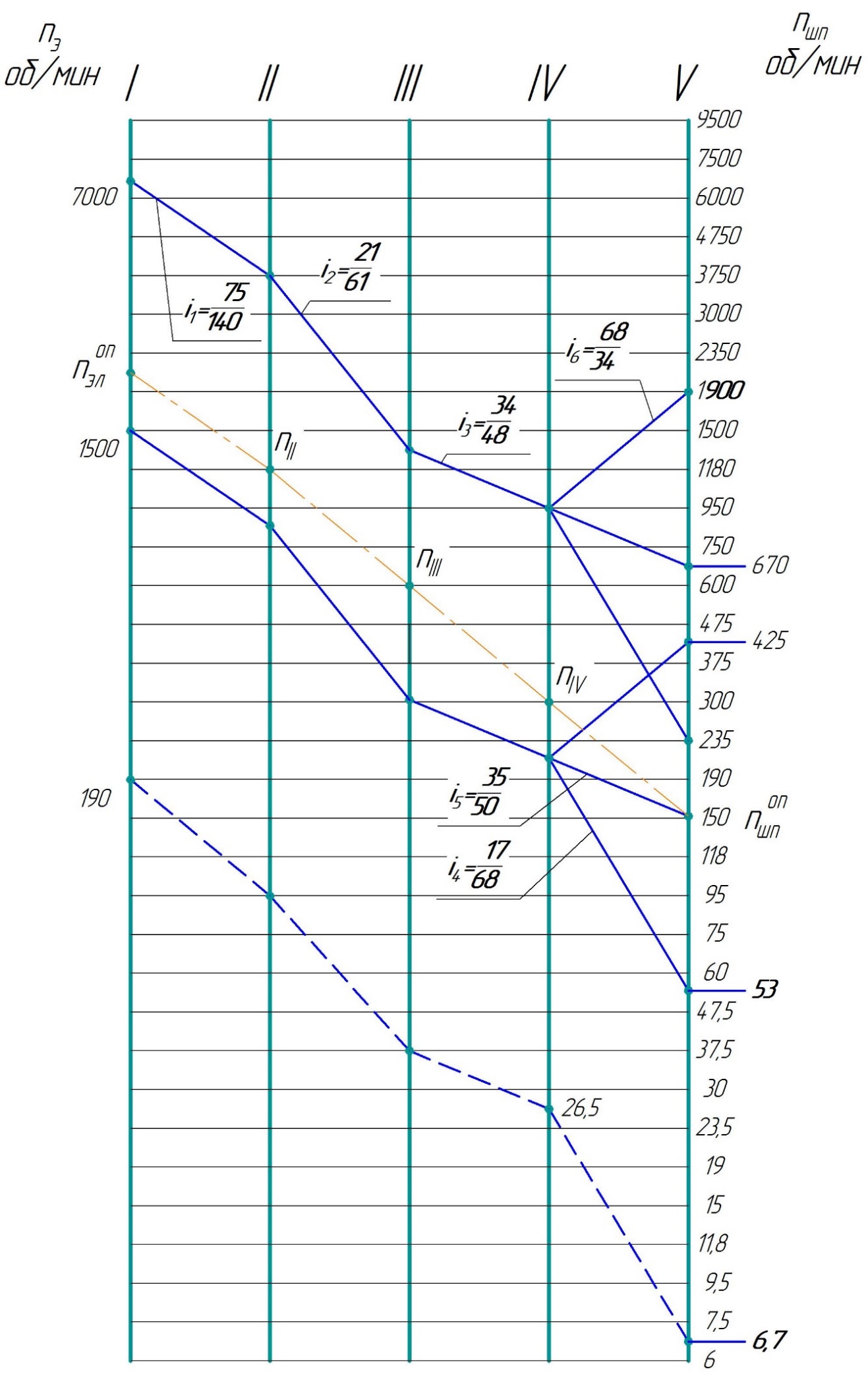
Рис. 9. График частот вращения главного привода станка мод. 2А135
с бесступенчатым регулированием (штрихпунктирная линия определяет
расчетные частоты вращения валов)
| Рис. 10. Кинематическая схема главного привода станка мод. 2А135 с бесступенчатым регулированием (в скобках приведены числа зубьев колес после их корректировки) |
В нашем примере (см. п. 1.3.) для
 и
и предельные значения опорной частоты составляют:
предельные значения опорной частоты составляют:
Округляем большую частоту до ближайшего значения стандартного ряда со знаменателем
 , т.е.
, т.е. 
2. Определяется опорная частота вращения на первом валу – электродвигателе
 , для чего используются значения номинальной частоты вращения двигателя –
, для чего используются значения номинальной частоты вращения двигателя –  (см. рис. 9).
(см. рис. 9).Для нашего случая при
 принимаем значение
принимаем значение
3. Найденные значения
и отмечаются на рис. 9 и соединяются прямой штрихпунктирной (расчетной) линией, которая будет определять необходимые расчетные частоты вращения валов привода главного движения.

Частота вращения последнего вала привода – шпинделя (
 ) в прочностных расчетах не используется.
) в прочностных расчетах не используется.5 Силовой расчет привода
Задачи силового расчета
Наиболее важными задачами, которые должны решаться при расчете и
конструировании коробок скоростей, являются:
- увеличение к.п.д.
- увеличение нагрузочной способности деталей и надежности их работы
- упрощение конструкции и технологии изготовления деталей, повышение точности и плавности хода особенно тяжелонагруженных и быстроходных зубчатых передач
- улучшение динамических свойств зубчатых колес, валов и т.д.
Определение мощности и крутящих моментов на валах привода
Мощность на валах привода определяется произведением (формула 1.2 [3]):

где
 – КПД участка кинематической цепи до i-вала, подсчитываемый как произведение КПД отдельных элементов, начиная с вала электродвигателя
– КПД участка кинематической цепи до i-вала, подсчитываемый как произведение КПД отдельных элементов, начиная с вала электродвигателя(
 ).
).Для определения мощности на валах используется рис. 10 на котором представлены все необходимые кинематические элементы (ремни, подшипники, зубчатые передачи), КПД которых необходимо учитывать при расчете.
Мощность на I валу:

Мощность на II валу:
где
 – КПД ременной передачи;
– КПД ременной передачи; – КПД подшипника качения.
– КПД подшипника качения.Подставив значения получим:

Мощность на III валу:
где
 – КПД зубчатой передачи; – КПД подшипника качения.
– КПД зубчатой передачи; – КПД подшипника качения.
Мощность на IVвалу определяем аналогично:

Величина мощности на последнем валу привода для прочностного расчета не требуется, поэтому величину
 не определяем.
не определяем.Крутящий момент на валах привода определяется по формуле (1.3) [3]:
где
 и
и  – мощность и расчетная частота вращения на i-м валу.
– мощность и расчетная частота вращения на i-м валу.Тогда:
