Файл: Пояснительная записка Соискатель, студент группы элб16 Догадин Р. А.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 07.11.2023
Просмотров: 132
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
СОДЕРЖАНИЕ
1 Устройство и принцип работы лабораторного стенда «Интеграл»
2 Математическое описание объектов лабораторного стенда «Интеграл»
преобразователь частоты – асинхронный двигатель (ПЧ – АД)
3 Моделирование режимов работы частотно-регулируемого
электропривода в пакете программ MatLab
4 Пуск асинхронного двигателя на лабораторном стенде «Интеграл»
5 Техника безопасности при работе с лабораторным стендом «Интеграл»
Рисунок 1.6 – Структура стенда с использованием ПЛК
Самым простым является управление через интерфейс USB. На рисунке 1.7 приведено подключение USB-кабеля. На компьютер устанавливается
программное обеспечение для преобразователя частоты конкретного производителя. В нашем случае используется программное обеспечение FRConfigurator фирмы MELSOFT. На рисунке 1.8 приведен пользовательский интерфейс программы.
FR-Configurator позволяет производить мониторинг, диагностику, настройку и управление преобразователем частоты. Перед началом работы с преобразователем частоты производится предварительная настройка программы, после её выполнения все параметры сохраняются в отдельный файл и при дальнейших запусках её выполнение не требуется.
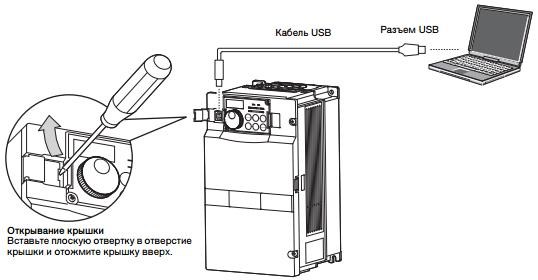
Рисунок 1.7 – Подключение преобразователя частоты через USB
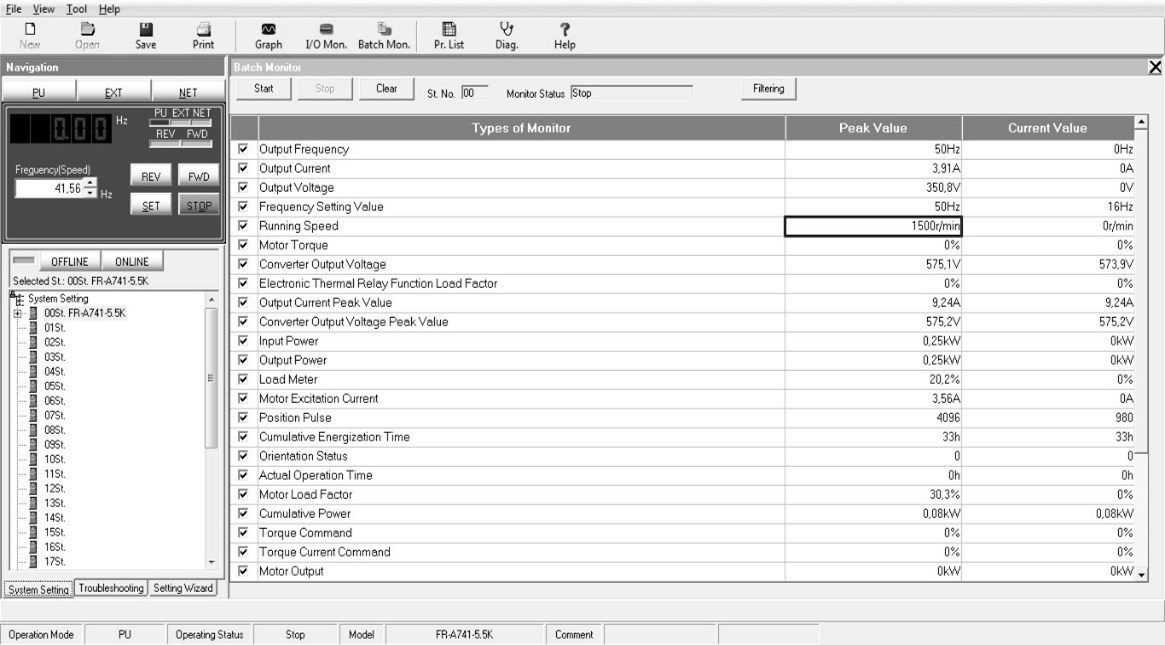
Рисунок 1.8 – Рабочее окно программы FR-Configurator
Вывод: управление преобразователем частоты при помощи персонального компьютера позволяет осуществлять регулирование скорости за счет изменения входного напряжения и его частоты, а также отслеживать выходные параметры такие, как ток, напряжение и его частота, потребляемая мощность, скорость вращения ротора и т.д. Также при помощи программы FR-Configurator можно
получить зависимости выходных параметров от времени работы электродвигателя в виде графиков, что делает работу стенда более наглядной.
1.1.4 Управление с сенсорной панели оператора
Панель оператора – устройство, предназначенное для внешнего управления технологическим процессом. К преобразователю частоты она может быть подсоединена непосредственно через интерфейс RS-422, либо через ПЛК. На лабораторном стенде панель оператора подключена через ПЛК по схеме, которая приведена на рисунке 1.9.
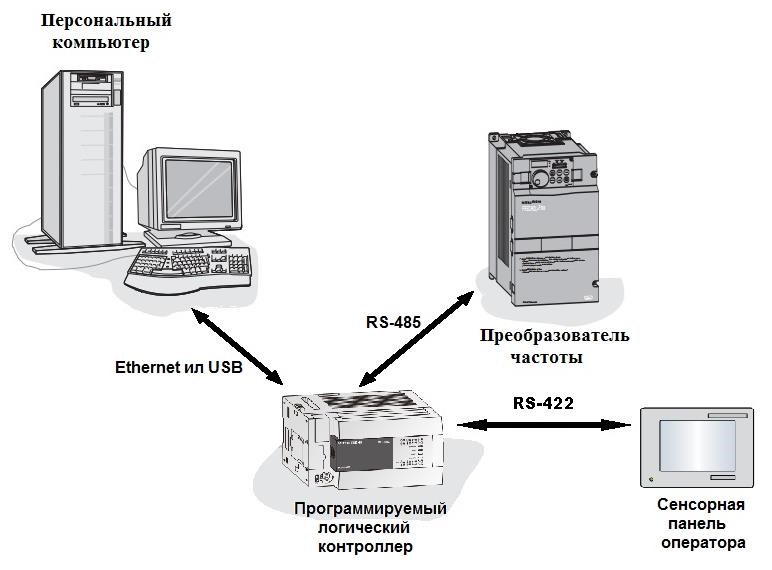
Рисунок 1.9 – Структура стенда при использовании сенсорной панели оператора
Панель оператора используется для визуализации и упрощения управления электроприводом. Существуют монохромные панели оператора и цветные. На стенде установлена цветная сенсорная панель Mitsubishi GT1055-QSBD. Использование цветной сенсорной панели даёт возможность создавать интуитивно понятные интерфейсы, где отображается не только числовая информация о параметрах объекта управления, но и графическая, где представлен сам технологический процесс. Её настройка и графическое оформление создается в программе
GT Designer.
Вывод: лабораторный стенд «Интеграл» состоит из преобразователя частоты Mitsubishi FR-A741, асинхронного двигателя ELDIN A100L4FБУЗ и персонального компьютера. Управление электроприводом может осуществляться посредством панели управления на преобразователе частоты, персонального компьютера через программу FR-Configurator, аналоговой панели, сенсорной панели. Данный лабораторный стенд позволяет изучить принцип работы частотно-регулируемого электропривода, изучить принцип скалярного и векторного регулирования скорости вращения электродвигателя. Также при управлении стендом с помощью персонального компьютера имеется возможность снимать выходные параметры стенда в виде графиков, что упрощает анализ работы стенда.
После того, как мы рассмотрели устройство и принцип работы лабораторного стенда «Интеграл», перейдем к математическому описанию его элементов.
2 Математическое описание объектов лабораторного стенда «Интеграл»
Перед моделированием режимов работы асинхронного частотно-
регулируемого электропривода, в частности асинхронного двигателя, в пакете программ MatLab, целесообразно рассмотреть их математические модели.
2.1 Математическое описание асинхронного двигателя
Для математического описания процессов в асинхронном двигателе часто используются дифференциальные уравнения обобщенной двухфазной машины переменного тока, полученные при общепринятых допущениях (без учета потерь в стали, высших гармоник магнитного поля с равномерным воздушным зазором и напряжение питания, которые представляют собой симметричную систему синусоидальных напряжений). Также в описании предполагается, что параметры схемы ротора приведены к схеме статора.
Исходные уравнения, записанные с использованием обобщенных пространственных векторов в системе координат, вращающихся с произвольной скоростью ωк (при отсутствии внешних источников напряжения в роторных цепях) имеют вид:
????
????̅̅1̅ = ????̅1 ∙ ????1 +
 ̅????̅̅1̅ + ???? ∙ ????к ∙ ̅????̅̅1̅;
̅????̅̅1̅ + ???? ∙ ????к ∙ ̅????̅̅1̅; ????????
(2.1)
????
0 = ????̅2 ∙ ????2 +
̅????̅̅2̅ + ???? ∙ (????к − ????э) ∙ ̅????̅̅2̅; ????????
????
где ????̅̅1̅ – обобщенный вектор напряжения статора; ????̅1, ????̅2 – обобщенные векторы тока соответственно статора, ротора; R1, R2 – активное сопротивление обмотки статора, ротора; ̅????̅̅1̅, ̅????̅̅2̅ – обобщенные векторы потокосцепления соответственно статора, ротора; ωк – электрическая угловая скорость вращения координатных осей; ωэ – электрическая угловая скорость вращения ротора,
????э = ???? ∙ ????п, (2.3)
где ω – механическая угловая скорость ротора; M – электромагнитный момент, развиваемый двигателем; pп – число пар полюсов асинхронной машины; L0 – индуктивность намагничивающего контура;
Jm – знак, указывающий на то, что берется только вещественная часть комплекса.
Для исследования переходных процессов система уравнений (2.1) и уравнение (2.2) дополняются уравнением движения электропривода:
???? ????????э (2.4)
???? − ????с =
 ∙ ,
∙ , ????п ????????
где Mс – момент статической нагрузки; J – приведенный к валу суммарный момент инерции электропривода, J = Jдв + Jмех; Jдв и Jмех – момент инерции двигателя и приведенный к валу двигателя момент инерции механизма.
Система уравнений (2.1), записанная через проекции обобщенных векторов на ортогональные оси u, jv координатной плоскости, вращающейся с произвольной скоростью ωк, имеет следующий вид:
????1???? = ????1 ∙ ????1???? + ???? ∙ ????1???? − ????к ∙ ????1????????;
????1???? = ????1 ∙ ????1???? + ???? ∙ ????1???? − ????к ∙ ????1????;
(2.5)
0 = ????2 ∙ ????2???? + ???? ∙ ????2???? − (????к − ????э) ∙ ????2????;
0 = ????2 ∙ ????2???? + ???? ∙ ????2???? − (????к − ????э) ∙ ????2????,
где p – оператор дифференцирования.
В этом случае электромагнитный момент, развиваемый асинхронным двигателем, может быть определен из выражения
????
Рациональное значение ωк зависит от типа решаемой задачи и, как правило, принимает одно из следующих значений: ωк = 0 (в этом случае принято обозначать координатные оси α, jβ); ωк = ω0э (координатные оси x, jy); ωк = ωэ (координатные оси d, jq). Здесь ω0э – электрическая угловая скорость электромагнитного поля статора. Эта величина соответствует электрической скорости холостого хода. Заметим, что механическая угловая скорость холостого хода, она же – синхронная скорость, ω0 = ω0э/pп.
Следует заметить, что, обозначая угловую скорость через ω и измеряя ее с-1, зачастую определение «угловая» опускают и оперируют термином «скорость».
Связь между полным потокосцеплением статора ̅????̅̅1̅, ротора ̅????̅̅2̅, главным потокосцеплением ̅????̅̅0̅ и токами статора i1 и ротора i2 ненасыщенной асинхронной машины выражается следующим образом:
̅????̅
;
(2.7)
̅????̅
где Ls = L0 + L1σ – полная индуктивность обмотки статора; L1σ – индуктивность рассеяния обмотки статора; Lr = L0 + L2σ – полная индуктивность обмотки ротора; L2σ – индуктивность рассеяния обмотки ротора.

Если учесть, что ????0 = ????1 + ????2, то выражения (2.7) можно записать в следующем виде:
̅????̅
(2.8)
̅????̅

где ̅????̅̅0̅ = ????0 ∙ ????0; ????1???? ∙ ????1 = ψ1????; ????
Запишем выражения для потокосцеплений через проекции на оси комплексной плоскости:
ψ1???? = ψ0???? + ????1???? ∙ ????1????;
(2.9)
ψ1???? = ψ0???? + ????1???? ∙ ????1????;
ψ2???? = ψ0???? + ????2???? ∙ ????1????; ψ2???? = ψ0???? + ????2???? ∙ ????1????; ψ0???? = ????0 ∙ ????0????; ψ0???? = ????0 ∙ ????0????.
При необходимости учета насыщения целесообразно использовать следующую систему уравнений:

ψ1 = ψ0 + ψ1????;

ψ2 = ψ0 + ψ2????;
(2.10)

????0 = ????1 + ????2;

В системе уравнений (2.10) переменная индуктивность ????0(|????0|), с помощью
которой учитывается насыщение двигателя по главному магнитному пути, рассчитывается по кривой намагничивания:
 ψ0(|????0|)
ψ0(|????0|)????0(|????0|) =,
(|????0|)