Файл: Лабораторная работа 1. Определение земного ускорения свободного падения при помощи оборот ного и математического маятников.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 09.11.2023
Просмотров: 187
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Лабораторная работа №1.
Определение земного ускорения свободного падения
при помощи оборотного и математического маятников.
| Цель работы: экспериментально определить ускорение свободного падения с помощью физического и математического маятников. Оборудование и принадлежности: установка с физическим и математическим маятником, секундомер, линейка с миллиметровыми делениями. 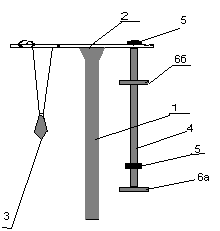 Рис.1. Схематический рисунок установки | |
ОПИСАНИЕ УСТАНОВКИ.
Общий вид оборотного маятника показан на рис.1. На стойке 1 зафиксирован кронштейн 2, на котором закреплён математический маятник 3 и оборотный маятник 4.
Оборотный маятник выполнен в виде стального стержня, на котором фиксируются две повернутые лезвиями друг к другу опорные призмы 5 и две чечевицы (подвижная 6а и неподвижная 6б).
На стержне с одного конца через 10 мм нанесены углубления. Подвижную чечевицу можно перемещать вдоль стержня и фиксировать в любом положении.
ЭЛЕМЕНТЫ ТЕОРИИ.
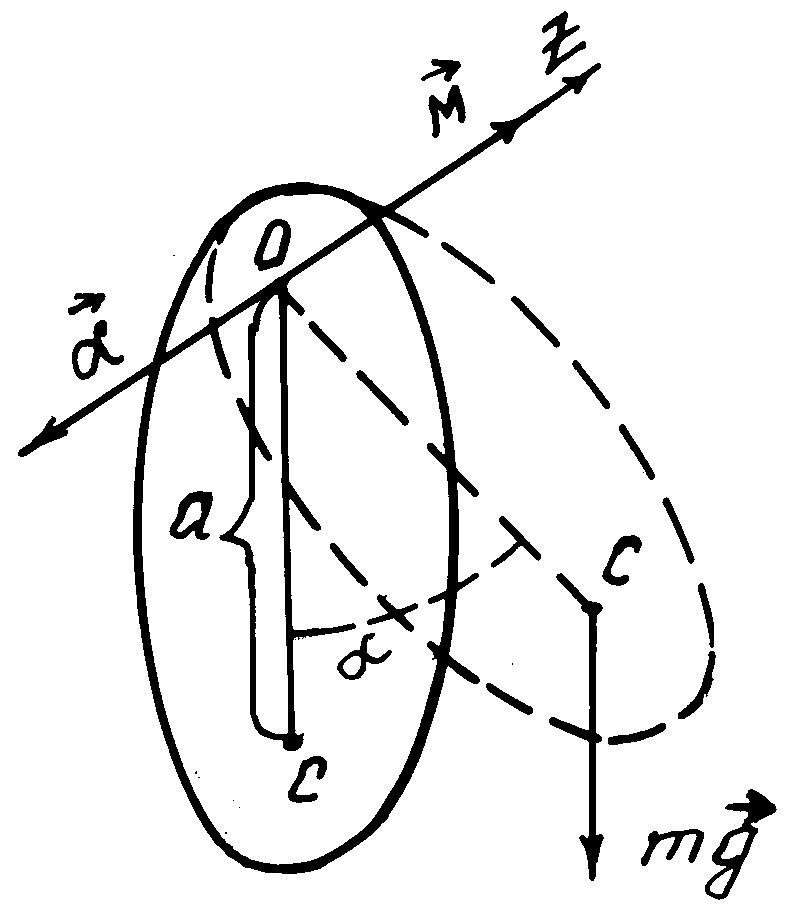
Рис. 2
Общие сведения. Физическим маятником называется твердое тело, способное совершать колебания под действием силы тяжести относительно горизонтальной оси, не проходящей через центр массы (рис. 2). К таким колебаниям применимо основное уравнение динамики вращательного движения твёрдого тела, которое в проекции на ось вращения Z имеет вид:
где Mz – проекция момента силы тяжести на осьZ, I – момент инерции маятника относительно оси колебаний, z – проекция углового ускорения на ось Z. Учитывая, что Mz = –mgasin, z = d2/dt2, получим:
где m – масса маятника, a – расстояние от оси вращения до центра масс маятника,
– угловое перемещение маятника (угол отклонения маятника от положения равновесия). Угловое перемещение – векторная величина, его направление определяется по правилу буравчика. В данном случае векторы
При малых углах отклонения sin, в этом случае уравнение (2) можно записать в виде:
Уравнение (3) представляет собой уравнение гармонических колебаний переменной величины , квадрат угловой частоты которых равен коэффициенту перед во втором слагаемом. То есть
Решение уравнения (3) можно записать в виде
(t) = ocos(t + o), (5)
где o – угловая амплитуда колебаний, o – начальная фаза колебаний.
Из вышеизложенного следует, что колебания физического маятника (как и математического маятника) не являются гармоническими. Они будут мало отличаться от гармонических колебаний лишь в том случае, когда выполняется условие sin, то есть, когда угол отклонения маятника от положения равновесия небольшой.
Из формулы (4) находим период колебаний физического маятника:
Период колебаний математического маятника длиной L вычисляется по формуле:
Сравнивая формулы (6) и (7), приходим к выводу, что математический маятник, длина которого
будет совершать колебания с тем же периодом, что и данный физический маятник. Точка, находящаяся на расстоянии L (рис. 1) от оси вращения физического маятника на прямой, проходящей через его центр масс перпендикулярно оси вращения, называется центром качания физического маятника. Величина L, вычисляемая по формуле (8), называется приведенной длиной физического маятника.
По теореме Гюйгенса – Штейнера
I = Io + ma2, (9)
где Io – момент инерции физического маятника относительно оси, проходящей через его центр масс параллельно оси колебаний.
Подставив (9) в (8), получим:
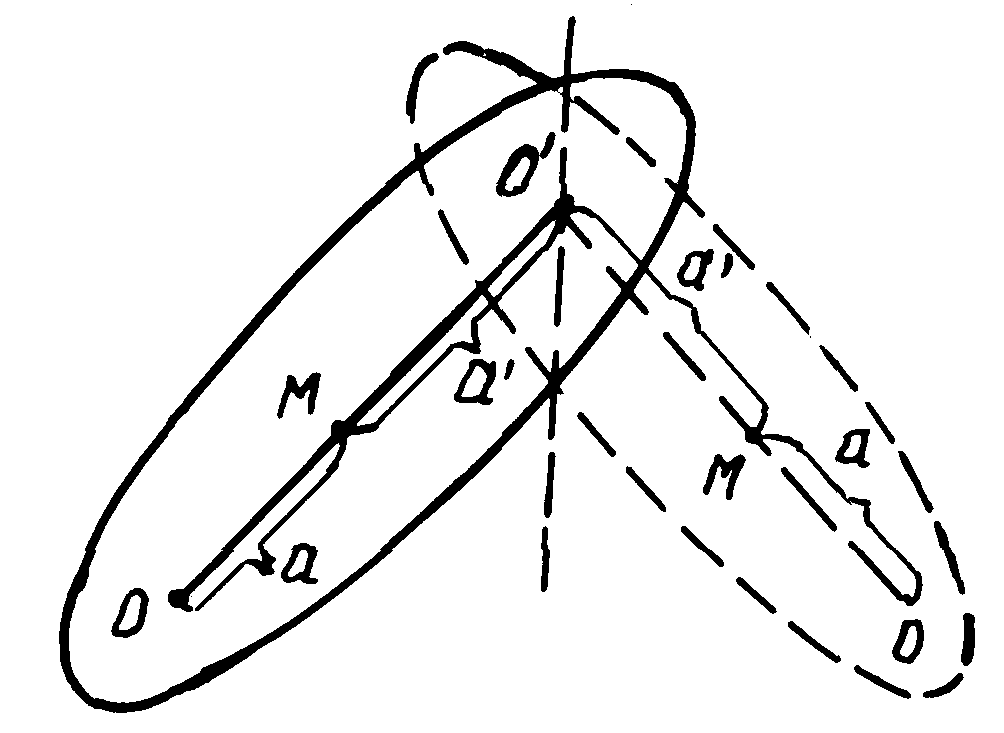
Рис. 3
Из (10) следует, что приведенная длина физического маятника больше расстояния от оси вращения до центра масс маятника на величину (рис. 2, 3)
Подвесим маятник на оси, параллельной прежней и проходящей через центр качания О (рис. 3). В этом случае приведенная длина маятника
По теореме Гюйгенса – Штейнера
Так как приведенная длина физического маятника относительно новой оси не изменилась, то и период его колебаний на новой оси также не изменился. Следовательно, данная ось и параллельная ей ось, проходящая через центр качания маятника, обладают свойством взаимности.
Ускорение свободного падения можно вычислить по формуле
При определении ускорения свободного падения с помощью оборотного маятника необходимо, изменяя его момент инерции (передвигая чечевицу 6а), добиться того, чтобы расстояние между опорными призмами стало равным приведенной длине оборотного маятника. Измерив L и T, по формуле (13) находим g.
Для определения ускорения свободного падения с помощью математического маятника необходимо измерить его длину L, соответствующий ей период колебаний T, и по формуле (13) вычислить g.
Чтобы повысить точность измерения периода колебаний T, необходимо измерить время t для n колебаний (обычно n = 10). Тогда
Порядок выполнения задания 1
1. Установить чечевицу 6а на расстоянии d
= 1 см от конца маятника.
2. Пользуясь секундомером, определить t (время n колебаний маятника), передвигая чечевицу 6а каждый раз на 1 см в диапазоне 1 – 15 см, в прямом и перевернутом положениях маятника для каждого положения передвигаемой чечевицы 6а. По формуле (14) найти период колебания. Данные занести в таблицу 1.
Таблица 1.
Результаты измерений периодов колебаний оборотного маятника.
3. На одном чертеже построить графики T(d) зависимости периодов колебаний в прямом и перевернутом положениях маятника от расстояния чечевицы 6а от конца стержня. Точка пересечения графиков будет соответствовать равенству периодов этих колебаний.
4. Установить чечевицу 6а в положение, соответствующее равенству периодов колебаний, и проверить их совпадение. Если Tпрям. = Tперев., то расстояние между опорными призмами равно приведенной длине L оборотного маятника.
5. Провести n раз измерения величин L, T, входящих в правую часть равенства (13), определить средние значения
6. По формуле (13) определить среднее значение ускорения свободного падения <g>.
Порядок выполнения задания 2.
1. Определить период Т колебаний математического маятника при различной его длине L. Для этого, как и в первом задании, измерить время t для n = 10 колебаний и найти T по формуле (14). Данные занести в таблицу 2.
2. По формуле (13) определить ускорение свободного падения g.
Таблица 2
Результаты измерений и расчётов ускорения свободного падения
с помощью математического маятника.
3. Построить график L (T2 ).
4. Сравнить значения ускорения свободного падения, полученные в первом и во втором заданиях.
На основании проделанных измерений сформулировать цель работы и сделать выводы.
КОНТРОЛЬНЫЕ ВОПРОСЫ:
1. Что такое физический и математический маятники ?
2. Дать определение физических величин: момент силы, момент инерции.
3. Какие колебания называются гармоническими? Привести примеры.
4. Что такое центр качания, как он расположен по отношению к точке
подвеса?
ЛИТЕРАТУРА:
1. Матвеев А.Н. Механика и теория относ-сти. -М.: Высшая школа, 1986;
2. Трофимова Т.И. Курс физики. -М.: Высшая школа, 1997;
3.Сивухин Д.В. Общий курс физики. -М.: Наука, 1989 Т. 1. Механика;
4. Физический практикум. Под ред. Кембровского Г.С. -Минск: Изд-во "Университетское", 1986.
Лабораторная работа №2
СЛОЖЕНИЕ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ
Цель работы: Изучить биения и сложение двух взаимно перпендикулярных колебаний с помощью электронного осциллографа.
Оборудование и принадлежности: осциллограф универсальный
С1-65, звуковой генератор, соединительные провода.
ЭЛЕМЕНТЫ ТЕОРИИ
Колебаниями называются движения или процессы, обладающие той или иной повторяемостью во времени. Простейшим типом колебаний являются гармонические колебания – колебания, при которых колеблющаяся величина изменяется со временем по закону синуса (косинуса) и описываются уравнением типа
x = А соs (t + 0),
где А – максимальное значение колеблющейся величины, называемое амплитудой колебания, – круговая (циклическая) частота, 0 или 0 – начальная фаза колебания в момент t=0, (t + 0) – фаза колебания в момент времени t. Фаза колебания определяет значение колеблющейся величины в данный момент времени. Так как косинус изменяется в пределах от +1 до –1, то х может принимать значения от +А до –А.
Определенные состояния системы, совершающей гармонические колебания, повторяются через промежуток времени Т, называемой периодом колебания, за который фаза колебания получает приращение 2.
Т= 2
Величина, обратная периоду колебаний, = 1/Т называется частотой колебаний и равна числу полных колебаний, совершаемых в единицу времени. Откуда =2. Единица частоты - герц (Гц). 1 Гц – частота периодического процесса, при которой за 1 с совершается 1 цикл процесса.
Гармонические колебания могут изображаться графически методом вращающегося вектора амплитуды, или методом векторных диаграмм.
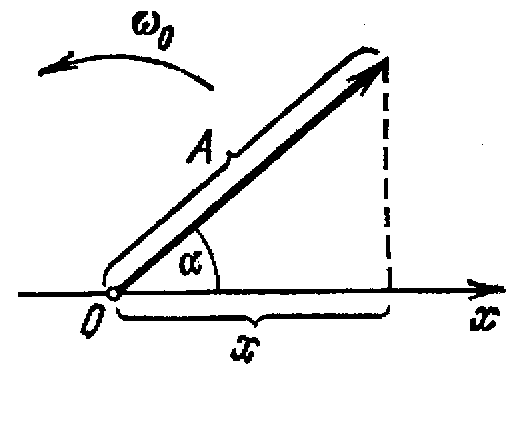 Возьмем ось, вдоль которой будем откладывать колеблющуюся величину x(рис.1). Из взятой на оси точки О отложим вектор длины A, образующий с осью угол . Если привести этот вектор во вращение с угловой скоростью ω, то проекция конца вектора будет перемещаться по оси x в пределах от -А до +A, причем координата этой проекции будет изменяться со временем по закону
Возьмем ось, вдоль которой будем откладывать колеблющуюся величину x(рис.1). Из взятой на оси точки О отложим вектор длины A, образующий с осью угол . Если привести этот вектор во вращение с угловой скоростью ω, то проекция конца вектора будет перемещаться по оси x в пределах от -А до +A, причем координата этой проекции будет изменяться со временем по закону Рис. 1.
Следовательно, проекция конца вектора на ось будет совершать гармонические колебания с амплитудой, равной длине вектора, с круговой частотой, равной угловой скорости вращения вектора, и с начальной фазой, равной углу, образуемому вектором с осью в начальный момент времени.
Таким образом, гармоническое колебание может быть задано с помощью вектора, длина которого равна амплитуде колебания, а направление образует с осью x угол, равный начальной фазе колебаний.
Рассмотрим сложение двух гармонических колебаний одного направления и одинаковой частоты. Результирующее колебаниебудет суммой колебаний х1и x2, которые определяются функциями
¯
П
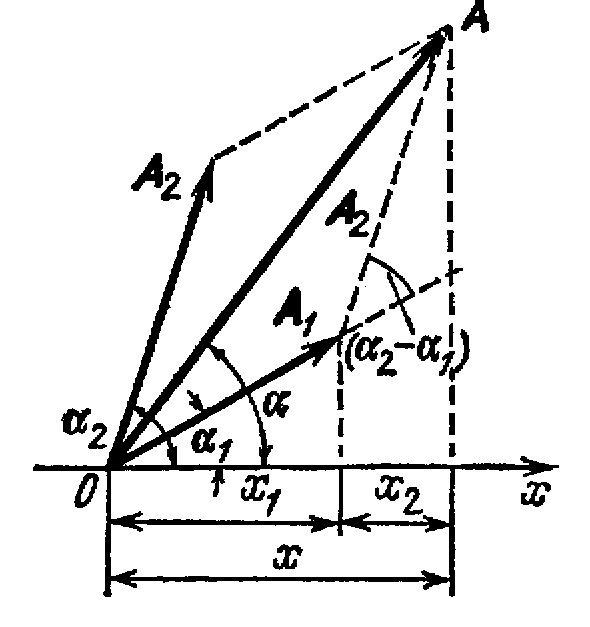 редставим оба колебания с помощью векторов A1и А2 (рис.2). Построим по правилам сложения векторов результирующий вектор А. На рисунке видно, что проекция этого вектора на ось xравна сумме проекций складываемых векторов:
редставим оба колебания с помощью векторов A1и А2 (рис.2). Построим по правилам сложения векторов результирующий вектор А. На рисунке видно, что проекция этого вектора на ось xравна сумме проекций складываемых векторов:Поэтому вектор Aпредставляет собой результирующее колебание. Этот вектор вращается с той же угловой скоростью ω0, как и векторы А1и А2, так что сумма x1и х2является гармоническим колебанием с
Рис. 2. частотой ω0, амплитудой Aи начальной
фазой α.
Используя теорему косинусов получаем, что
Также из рисунка видно, что
Представление гармонических колебаний с помощью векторов позволяет заменить сложение функций сложением векторов, что значительно проще.
1. Биения.
Рассмотрим сложение двух гармонических колебаний, происходящих вдоль одной прямой с частотами ω1 и ω2, незначительно отличающихся друг от друга. (Ω=( |ω1 - ω2 |<< ω1 и Ω<< ω2 ).Пусть в начальный момент времени фазы складываемых колебаний одинаковы. Тогда эти колебания запишутся в виде
Найдем сумму двух таких колебаний, предположив для простоты сначала, что их амплитуды одинаковы (A1 = A2):
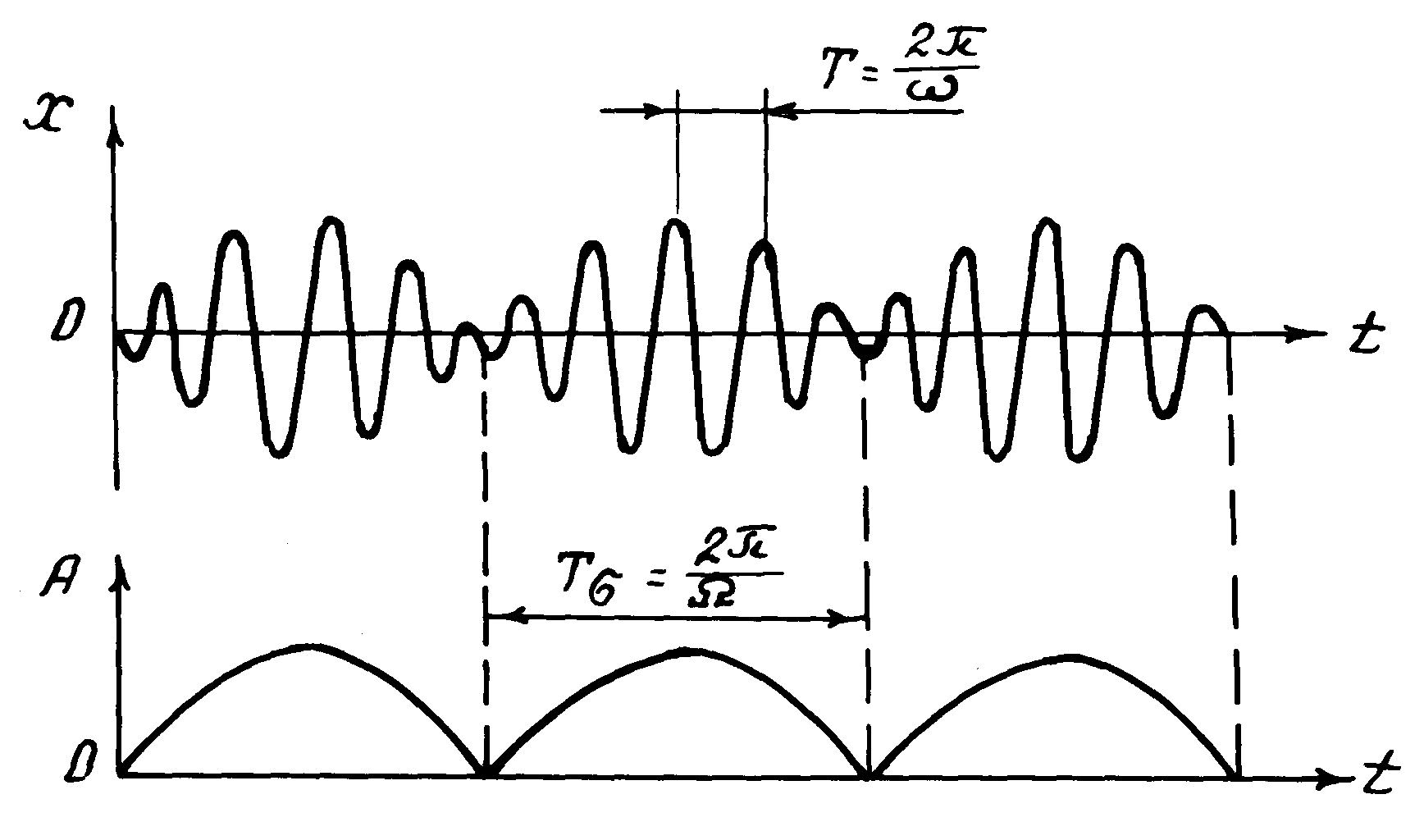
Рис. 3.
Отсюда видно, что результирующее колебание (биение) происходит с частотой (ω1+ω2)/2, а амплитуда колебаний со временем изменяется в пределах от 2A1 до 0 по закону
νб = 1/Tб = |ν1 - ν2 |, где ν1 и ν2- частоты складываемых колебаний.
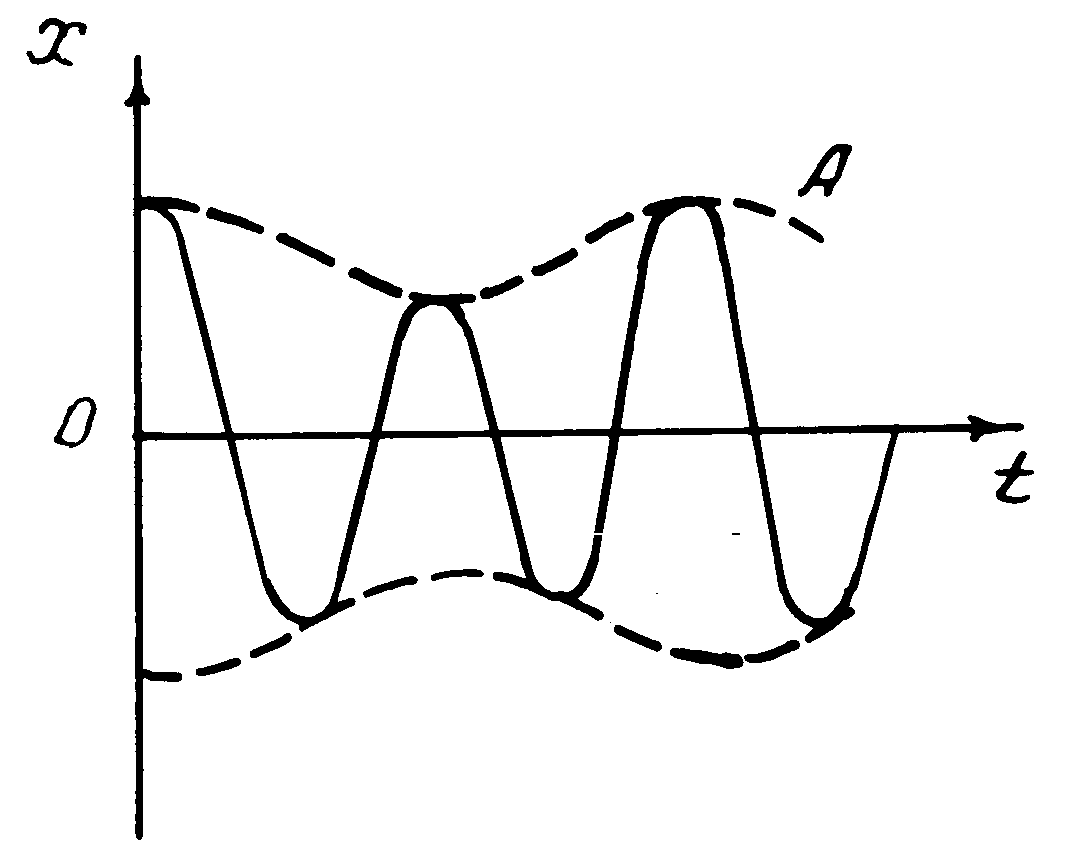
Рис. 4.
Если амплитуды складываемых колебаний не равны (A1 # A2), то максимальное значение амплитуды результирующего колебания равно A1+A2, а минимальное А1-А2. В этом случае биения выражены менее четко (рис.4). Частоты Ω, νб и период Tб определяются разностью частот складываемых колебаний и не зависят от их амплитуд и начальных фаз.
Сложение колебаний во взаимно перпендикулярных направлениях.
Представим две взаимно перпендикулярные векторные величины xи y, изменяющиеся со временем с одинаковой частотой ω по гармоническому закону
где exи eу — орты координатных осей xи y, Аи B — амплитуды колебаний. Величинами xиуможет быть, например, смещения материальной точки (частицы) из положения равновесия. В случае колеблющейся частицы величины
определяют координаты частицы на плоскости xy. Частица будет двигаться по некоторой траектории, вид которой зависит от разности фаз обоих колебаний. Выражения (6) представляют собой заданное в параметрической форме уравнение этой траектории. Чтобы получить уравнение траектории в обычном виде, нужно исключить из уравнений (6) параметр t. Из первого уравнения следует, что
Соответственно
Развернем косинус во втором из уравнений (6) по формуле для косинуса суммы:
Подставим вместо cosωtи sinωt их значения (3) и (4):
Преобразуем это уравнение
Это уравнение эллипса, оси которого повернуты относительно координатных осей х и у. Ориентация эллипса и его полуоси зависят довольно сложным образом от амплитуд Aи В и разности фаз α.
Попробуем найти форму траектории для нескольких частных случаев.
-
Разность фаз α равна нулю.
В этом случае уравнение (10) упрощается следующим образом:
Отсюда получается уравнение прямой:
Результирующее движение является гармоническим колебанием вдоль этой прямой с частотой ω и амплитудой, равной
-
Разность фаз α равна ±π.
Уравнение (10) имеет вид
Следовательно, результирующее движение представляет собой гармоническое колебание вдоль прямой
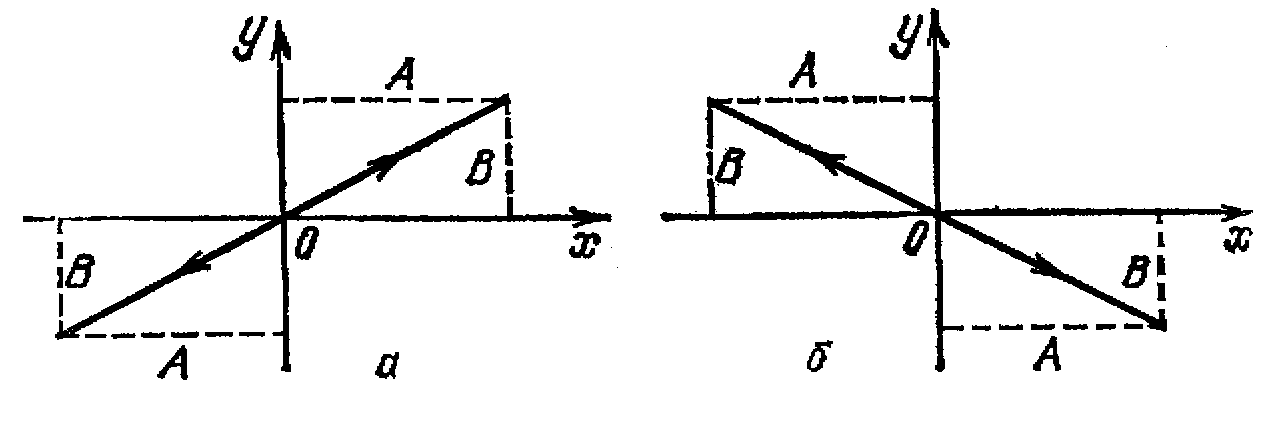
Рис.5.
-
Разность фаз .
.
Уравнение (10) переходит в уравнение эллипса, приведенного к координатным осям:
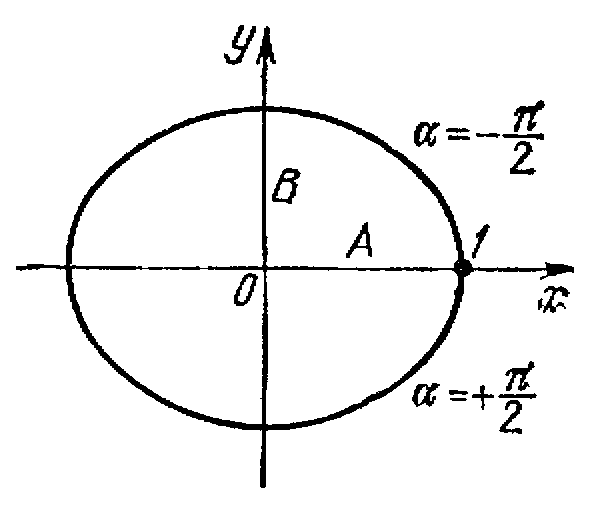
Рис.6.
Полуоси эллипса равны соответствующим амплитудам колебаний. При равенстве амплитуд А и В эллипс превращается в окружность.
Случаи
Следовательно, равномерное движение по окружности радиуса R с угловой скоростью ω может быть представлено как сумма двух взаимно перпендикулярных колебаний:
(знак плюс в выражении для у соответствует движению против часовой стрелки, знак минус — движению по часовой стрелке).
Если частоты взаимно перпендикулярных колебаний не одинаковы, то траектории результирующего движения имеют вид сложных кривых, называемых фигурами Лиссажу.
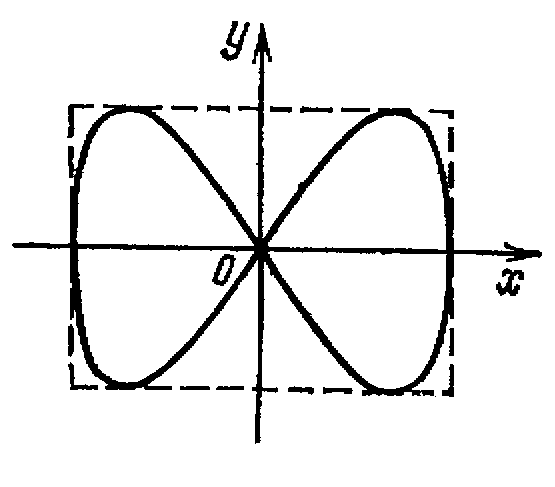
Рис.7. Фигура Лиссажу для
отношения частот 1:2 и
разности фаз π/2
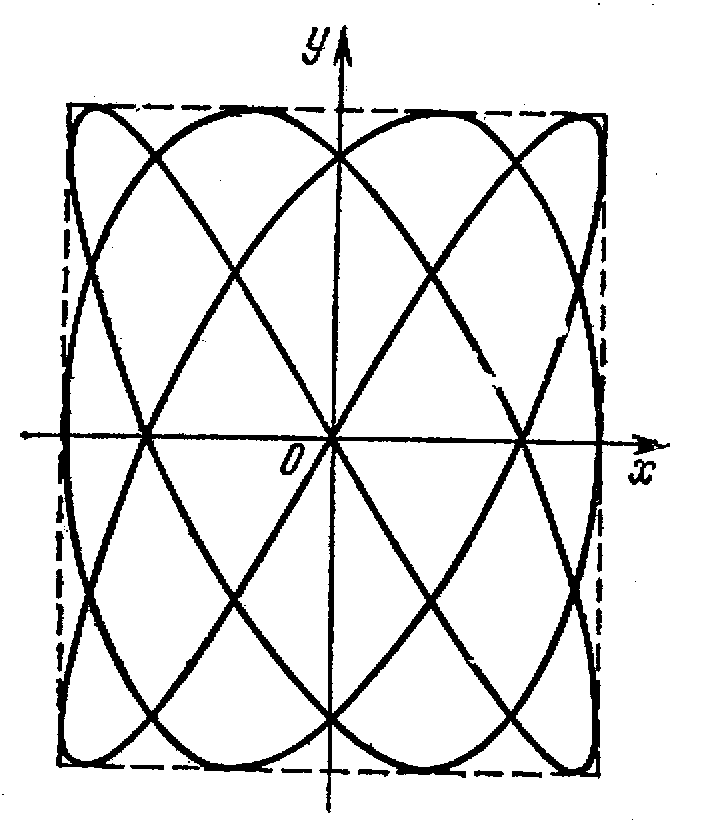
Рис.8. Фигура Лиссажу для отношения частот 3:4
и разности фаз π/2
Наблюдать биения и фигуры Лиссажу можно с помощью электронного осциллографа и звуковых генераторов.
Порядок выполнения задания.
1. Ознакомиться с инструкциями к осциллографу и звуковым генераторам, подобрать режим их работы.
Описание установки:
1)Схема установки (см. рис.9.) :
-
Звуковой генератор( в нем совмещены два звуковых генератора, необходимых в данной работе)
U1-источник питания стабилизированный. Питает 1-й звуковой генератор (U1 = 5V)
U2- источник питания стабилизированный. Питает 2-й звуковой генератор (U1 = 15V)
1а и 1б – переключатели задаваемой частоты сигналов на выходе из генераторов;
2 – кнопка синхронизации колебаний;
3а и 3б – ручки регулирования амплитуды сигналов на выходе из генераторов
ЗГ.1 и ЗГ2 – выходы звукового генератора.
2.Осциллограф
4 – входное гнездо для подачи исследуемых сигналов;
5 – ручка управления усилителем Y ( V/дел – устанавливает коэффициент вертикального отклонения сигнала; плавно – обеспечивает плавную регулировку коэффициент отклонения в каждом положении переключателя V/дел)
6 – переключатель, который устанавливает вид развертки;
7 – входное гнездо для внешнего синхронизирующего сигнала. Это гнездо используется также для внешнего горизонтального входа, если переключатель 6 установлен в положение X.
8 – ручка управления разверткой (устанавливает скорость развертки)
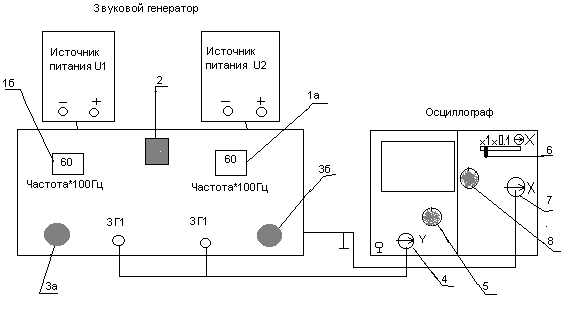
Рис. 9.
1.Изучить биения.
1.Соединить звуковой генератор с осциллографом как показано на рис.9 (переключатель 6 установить в крайнее левое положение). Условием для получения отчетливой осциллограммы биений является равенство амплитуд складываемых колебаний.
2. Получить задание у преподавателя по изучению биений.
2.Изучить сложение взаимно перпендикулярных колебаний.
1.Подать на вход Y осциллографа один звуковой сигнал. А на вход Х осциллографа второй сигнал от генератора. При этом переключатель 6 (рис.7) должен быть в крайнем правом положении. В этом положении отключается развертка.
2.Далее установить одинаковые амплитуды и получить на экране осциллографа кривые (фигуры Лиссажу), возникающие в результате сложения двух взаимно перпендикулярных колебаний. Отношение частот складываемых колебаний выбирать равными 1:1, 1:2, 2:3, 3:4. Зарисовать наблюдаемые фигуры (для фиксации фигур Лиссажу нажать кнопку синхронизации колебаний – 2(рис.9).