ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 09.11.2023
Просмотров: 212
Скачиваний: 3
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
СОДЕРЖАНИЕ
Принципы работы системы автоматической парковки и распознавания государственных номеров
Разработка функциональной схема автоматизации
Выбор среды разработки ПО и разработка программы.
Технико-экономическое обоснование выполнения проекта
Безопасность жизнедеятельности
Технические решения пожаротушения
Технические решения обеспечения безопасности жизнедеятельности
пользователя
Блок идентификации транспортного средства (распознавание номеров) представлен RFID модулем (рисунок 2.7). Для связи с контроллером используется последовательный порт RS-232 [12,13].
Общие характеристики RFID модуля RC522:

Рисунок 2.8 – Модуль RFID RC522
На рисунке 2.8 приведена функциональная схема блока идентификации транспортного средства.
Рисунок 2.9– Функциональная схема блока идентификации транспортного средства
Выбор остановлен на RC522.
Микросхема RC522, изображенная на рисунке 2.10, поддерживает интерфейсы SPI, UART и I2C. Выбор интерфейса осуществляется установкой логических уровней на определенных выводах микросхемы. На данном модуле выбран интерфейс SPI.

Рисунок 2.10 – Микросхема RC522
На рисунке 2.11 изображена принципиальная схема идентификации транспортного средства.
DD3
Рисунок 2.11 – Принципиальная схема идентификации блока транспортного средства
Для разработки системы распознавания государственных номеров на
стоянке и непосредственного пропуска автомобиля на стоянку предлагается использовать ИК датчик.
Для измерения расстояния до объекта существуют ИК датчики, работающие на методе триангуляции. Самые распространенные из них - это работающие на длине волны, инфракрасные (на английском языке infra-red, сокращенно IR) датчики расстояния с выходным аналоговым напряжением, производимые фирмой Sharp. У датчиков Sharp имеется IR LED с линзой, который излучает узкий световой луч.
На рисунке 2.12 показан путь отраженного луча на различных расстояниях.
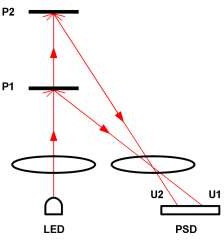
Рисунок 2.12 – Путь светового луча IR измерителя расстояния
Выход датчика расстояния Sharp обратно пропорциональный. Точный график между расстоянием и выходом приведен в спецификации датчика. У датчиков, в соответствии с типом, имеется граница измерения, в пределах которой выход датчика является надежным [4].
Блок идентификации парковочного места представлен ИК-датчиком приближения.
Этот ИК-датчик приближения представляет собой многофункциональный инфракрасный датчик, который может использоваться для обнаружения препятствий, определения цвета, обнаружения пожара, определения линии, а также в качестве датчика. Датчик обеспечивает цифровой выход.
Датчик выводит логическую единицу (+5 В) на цифровой выход, когда объект находится перед датчиком и логический нуль (0 В), когда перед датчиком нет никакого объекта. Светодиодный индикатор используется для обозначения присутствия объекта.
Этот цифровой выход может быть напрямую подключен к Arduino, Raspberry Pi, AVR, ARM, PIC, 8051 или любому другому контроллеру для считывания выходного сигнала
датчика.
ИК-датчики очень чувствительны к окружающему свету на датчике. Датчик имеет максимальный диапазон от 40 до 50 см в помещении и от 15 до 20 см на открытом воздухе.
Некоторые особенности:
Блок идентификации парковочного места представлен на рисунке 2.13.
Рисунок 2.13 – Функциональная схема блока идентификации парковочного места
Для идентификации занятости парковочного места мной был выбран ИК-датчик приближения.
Это еще один из модулей с прекрасными возможностями. Например, вы можете услышать сигнал тревоги, когда что-то слишком близко, или вы можете изменить направление робота или автомобиля. Устройство состоит из инфракрасного передатчика, детектор инфракрасного и поддержки схем. Для этого требуется только три соединения. Когда он обнаруживает препятствие в пределах диапазона, он будет посылать выходной сигнал низким.
Это устройство имеет инфракрасный передатчик и приемник, который формирует пару датчиков. Светодиод передатчика излучает определенную частоту инфракрасного излучения, который будет обнаруживать светодиод приемника. Вы можете использовать
его для регулировки расстояния от объекта, на котором датчик его обнаруживает. Как правило, другой потенциометр, который изменяет ИК-частоту передатчика, не регулируется.
Назначения элементов и выводов:
Характеристики:
На рисунке 2.14 можно увидеть модули, элементы управления и индикаторы.
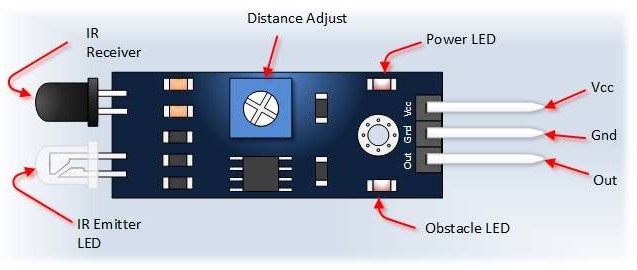
Рисунок 2.14 – Модули, элементы управления и
индикаторы
Блок управления шлагбаумом представлен шаговым двигателем в паре с драйвером ULN2003 [8].
В данном дипломном проекте выбран униполярный шаговый двигатель 28-BYJ48 с драйвером ULN2003, который изображен на рисунках 2.14 и 2.15.

Рисунок 2.15 – Шаговый двигатель 28-BYJ48 и драйвер ULN2003

Рисунок 2.16 – Шаговый двигатель 28-BYJ48 Блок управления шлагбаумом представлен на рисунке 2.17.
Рисунок 2.17 – Функциональная схема блока управления шлагбаумом
Шаговый двигатель, изображенный на рисунке 2.17, широко применяется в системах, требующих точность.

Рисунок 2.18 – Шаговый двигатель
В отличие от двигателя постоянного тока у шагового двигателя отсутствуют щетки и коммутатор, поэтому там имеется несколько отдельных обмоток, которые коммутируются внешней электроникой (драйвером).
На рисунке 2.19 изображена принципиальная схема блока управления шлагбаумом.
-
Блок идентификации транспортного средства
Блок идентификации транспортного средства (распознавание номеров) представлен RFID модулем (рисунок 2.7). Для связи с контроллером используется последовательный порт RS-232 [12,13].
Общие характеристики RFID модуля RC522:
-
напряжение питания 5 В; -
потребляемый ток от 13 до 26 мA; -
рабочая частота 13,56 МГц; -
дальность считывания от 0 до 60 мм; -
интерфейс SPI; -
максимальная скорость передачи до 10 Мбит/с; -
размер 40х60мм.
Рисунок 2.8 – Модуль RFID RC522
На рисунке 2.8 приведена функциональная схема блока идентификации транспортного средства.
Рисунок 2.9– Функциональная схема блока идентификации транспортного средства
Выбор остановлен на RC522.
Микросхема RC522, изображенная на рисунке 2.10, поддерживает интерфейсы SPI, UART и I2C. Выбор интерфейса осуществляется установкой логических уровней на определенных выводах микросхемы. На данном модуле выбран интерфейс SPI.
Рисунок 2.10 – Микросхема RC522
На рисунке 2.11 изображена принципиальная схема идентификации транспортного средства.
DD3
Рисунок 2.11 – Принципиальная схема идентификации блока транспортного средства
-
Блок идентификации парковочного места
Для разработки системы распознавания государственных номеров на
стоянке и непосредственного пропуска автомобиля на стоянку предлагается использовать ИК датчик.
Для измерения расстояния до объекта существуют ИК датчики, работающие на методе триангуляции. Самые распространенные из них - это работающие на длине волны, инфракрасные (на английском языке infra-red, сокращенно IR) датчики расстояния с выходным аналоговым напряжением, производимые фирмой Sharp. У датчиков Sharp имеется IR LED с линзой, который излучает узкий световой луч.
На рисунке 2.12 показан путь отраженного луча на различных расстояниях.
Рисунок 2.12 – Путь светового луча IR измерителя расстояния
Выход датчика расстояния Sharp обратно пропорциональный. Точный график между расстоянием и выходом приведен в спецификации датчика. У датчиков, в соответствии с типом, имеется граница измерения, в пределах которой выход датчика является надежным [4].
Блок идентификации парковочного места представлен ИК-датчиком приближения.
Этот ИК-датчик приближения представляет собой многофункциональный инфракрасный датчик, который может использоваться для обнаружения препятствий, определения цвета, обнаружения пожара, определения линии, а также в качестве датчика. Датчик обеспечивает цифровой выход.
Датчик выводит логическую единицу (+5 В) на цифровой выход, когда объект находится перед датчиком и логический нуль (0 В), когда перед датчиком нет никакого объекта. Светодиодный индикатор используется для обозначения присутствия объекта.
Этот цифровой выход может быть напрямую подключен к Arduino, Raspberry Pi, AVR, ARM, PIC, 8051 или любому другому контроллеру для считывания выходного сигнала
датчика.
ИК-датчики очень чувствительны к окружающему свету на датчике. Датчик имеет максимальный диапазон от 40 до 50 см в помещении и от 15 до 20 см на открытом воздухе.
Некоторые особенности:
-
может использоваться для обнаружения препятствий, определения цвета (между основными контрастными цветами); -
поставляется с довольно простым и удобным в использовании цифровым выходом; -
может использоваться для беспроводной связи и обнаружения других ИК-сигналов; -
датчик поставляется с защитой от внешнего освещения; -
датчик представляет собой отверстие диаметром 3 мм для удобства монтажа.
Блок идентификации парковочного места представлен на рисунке 2.13.
Рисунок 2.13 – Функциональная схема блока идентификации парковочного места
Для идентификации занятости парковочного места мной был выбран ИК-датчик приближения.
Это еще один из модулей с прекрасными возможностями. Например, вы можете услышать сигнал тревоги, когда что-то слишком близко, или вы можете изменить направление робота или автомобиля. Устройство состоит из инфракрасного передатчика, детектор инфракрасного и поддержки схем. Для этого требуется только три соединения. Когда он обнаруживает препятствие в пределах диапазона, он будет посылать выходной сигнал низким.
Это устройство имеет инфракрасный передатчик и приемник, который формирует пару датчиков. Светодиод передатчика излучает определенную частоту инфракрасного излучения, который будет обнаруживать светодиод приемника. Вы можете использовать
его для регулировки расстояния от объекта, на котором датчик его обнаруживает. Как правило, другой потенциометр, который изменяет ИК-частоту передатчика, не регулируется.
Назначения элементов и выводов:
-
напряжение питания (Vcc) 5 В; -
общий провод – GND; -
выход (Out), который становится низким, когда препятствие становится в зоне действия; -
индикатор питания (Power LED) - загорается при подаче питания; -
светодиод препятствия (Obstacle LED) - загорается, когда обнаружено препятствие; -
регулировка расстояния (Distance Adjust) – регулирует расстояние обнаружения. CCW уменьшает расстояние. CW увеличивает расстояние; -
инфракрасный излучатель (IR Emitter) – передаёт инфракрасный сигнал; -
инфракрасный приемник (IR Receiver) - принимает сигнал, передаваемый инфракрасным излучателем.
Характеристики:
-
рабочее напряжение от 3,3 до 5 В; -
рабочий ток около 20 мА; -
рабочая температура варьируется от минус 10° С до плюс 50° С; -
расстояние обнаружения от 2 до 40 см; -
интерфейс ввода-вывода: 4-проводные интерфейсы (- / + / S / EN); -
выходной сигнал: уровень TTL (низкий уровень - это препятствие, без препятствий); -
регулировка: регулировка многооборотного сопротивления; -
эффективный угол 35°; -
Размер 28 × 23 мм; -
Вес 9 г.
На рисунке 2.14 можно увидеть модули, элементы управления и индикаторы.
Рисунок 2.14 – Модули, элементы управления и
индикаторы
-
Блок управления шлагбаумом.
Блок управления шлагбаумом представлен шаговым двигателем в паре с драйвером ULN2003 [8].
В данном дипломном проекте выбран униполярный шаговый двигатель 28-BYJ48 с драйвером ULN2003, который изображен на рисунках 2.14 и 2.15.
Рисунок 2.15 – Шаговый двигатель 28-BYJ48 и драйвер ULN2003
Рисунок 2.16 – Шаговый двигатель 28-BYJ48 Блок управления шлагбаумом представлен на рисунке 2.17.
Рисунок 2.17 – Функциональная схема блока управления шлагбаумом
Шаговый двигатель, изображенный на рисунке 2.17, широко применяется в системах, требующих точность.
Рисунок 2.18 – Шаговый двигатель
В отличие от двигателя постоянного тока у шагового двигателя отсутствуют щетки и коммутатор, поэтому там имеется несколько отдельных обмоток, которые коммутируются внешней электроникой (драйвером).
На рисунке 2.19 изображена принципиальная схема блока управления шлагбаумом.
| P1.16P1.17P1.18 | LPC2148 | P0.0P0.1P0.2 |
| P1.19 | | P0.3 |
| P1.20 | | P0.4 |
| P1.21 | | P0.5 |
| P1.22 | | P0.6 |
| P1.23 | | P0.7 |
| P1.24 | | P0.8 |
| P1.25 | | P0.9 |
| P1.26 | | P0.10 |
| P1.27 | | P0.11 |
| P1.28 | | P0.12 |
| P1.29 | | P0.13 |
| P1.30 | | P0.14 |
| P1.31 | | P0.15 |
| RESET | | P0.16 |
| XTAL1 | | P0.17 |
| XTAL2 | | P0.18 |
| RTXC1 | | P0.19 |
| RTXC2 | | P0.20 |
| VBAT | | P0.21 |
| VREF | | P0.22 |
| VDDA | | P0.23 |
| VSSA | | |
| VDD | | P0.25 |
| VDD | | P0.26 |
| VDD | | P0.27 |
| VSS | | P0.28 |
| VSS | | P0.29 |
| VSS | | P0.30 |
| VSS | | P0.31 |
| VSS | | |