ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 09.11.2023
Просмотров: 191
Скачиваний: 3
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
СОДЕРЖАНИЕ
Принципы работы системы автоматической парковки и распознавания государственных номеров
Разработка функциональной схема автоматизации
Выбор среды разработки ПО и разработка программы.
Технико-экономическое обоснование выполнения проекта
Безопасность жизнедеятельности
Технические решения пожаротушения
Технические решения обеспечения безопасности жизнедеятельности
IO0SET используется для установки выводов Port0 - P0 в логику 1.
Пример: IO0SET = 0x0000FFFF будет устанавливать контакты P0.0 - P0.15 в логическую 1. Это не повлияет на другие контакты.
Регистр IO0CLR используется для установки выводов Port0 - P0 в логический 0.
Пример: IO0CLR = 0x0000FFFF будет устанавливать контакты P0.0 на P0.15 на логике 0. Это не повлияет на другие контакты.
Регистр IO1SET используется для установки выводов Port1-P1 в логическую 1.
Пример: IO1SET = 0x0000FFFF будет устанавливать контакты P1.0 на P1.15 в логике 1. Это не повлияет на другие контакты.
Регистр IO1CLR используется для установки выводов Port1-P1 в логический 0.
Пример: IO1CLR = 0x0000FFFF будет устанавливать контакты P1.0 на P1.15 в логической точке 0. Это не повлияет на другие контакты.
VSSVCCVEE
RSRWE
D0D1D2D3D4D5D6D7
На рисунке 2.21 изображена принципиальная схема блока микроконтроллера
 Рисунок 2.21 – Принципиальная схема блока микроконтроллера
Рисунок 2.21 – Принципиальная схема блока микроконтроллера
Стоит отметить, что разработанный прототип автоматизированной парковки с внедрением системы распознавания государственных номеров может использоваться на всех стоянках, в том числе и возле кинотеатров, кафе и тд. Система удобна, так как с помощью системы распознавания государственных номеров может подобрать место для стоянки и закрывать и открывать шлагбаум. Система полностью автоматизирована, человеческие
ресурсы не нужны. Система наглядна и относительно дешевая по сравнению с существующими аналогами.
VSSVCCVEE
RSRWE
D0D1D2D3D4D5D6D7
 Рисунок 2.22 – Функциональная схема блока микроконтроллера Обеспечивая производительность до 54 MIPS, имеют встроенную
Рисунок 2.22 – Функциональная схема блока микроконтроллера Обеспечивая производительность до 54 MIPS, имеют встроенную
Flash-память объемом 128/256/512 кБ со 128-битной шиной, статическую оперативную память (SRAM) объемом 16/32/64 кБ, модуль ШИМ, многоканальный 10-битный модуль АЦП, 10 - битный модуль ЦАП, SPI, CAN, два UART (один UART с полным модемным интерфейсом), USB.
Основными компонентами, используемыми в разрабатываемом системном оборудовании, предварительно являются ARM7 (LPC2148) [5], модуль GSM, RFID модуль и модуль распознавания номерных знаков. Микроконтроллер ARM7 сопряжен с GSM и RFID-модулем. Используя технологию GSM, мы можем проверить место для стоянки, а с помощью системы распознавания можем проверить государственный номер авто, используя соответствующие команд через SMS.
Инфракрасный датчик, который помещается на секции мест, проверяет их доступность. Если есть свободное место, пользователю отправляется соответствующее сообщение.
Сообщение включает номер парковочного места, продолжительность парковки, плату за парковку в зависимости от времени и защищенный код.
RFID технология включает в себя считывающие датчики, используемые для пропуска на стоянку и считывания суммы за парковку.
В рамках выполнения работы для непосредственного распознавания номерных знаков предлагается использование нейронной сети.
Когда объект сложно распознать, но он хорошо выделяемый, то зачастую единственным способом работы с ним является выделить его контуры, для определения что это за объект. В данное время существует более 10 алгоритмов, решающих задачу фильтрации контуров, мы перечислим основные 5 [4]:
Чаще всего используется именно Кэнни, который выделает контуры, при правильных настройках (рисунок 2.23).

Рисунок 2.23 - Использование оператора Кэнни
Каскад Хаара используется в методе Виолы—Джонса. Этот алгоритм, позволяет обнаруживать объекты на изображениях. Алгоритм хорошо справляется с распознаванием различных классов изображений. Основное преимущество детектора Хаара – это скорость. Благодаря высокой скорости обработки изображения, можно с лёгкостью обрабатывать видео в потоке. Детектор Хаара используется для распознавания для большого количества классов объектов.
Для того чтобы наглядно продемонстрировать внутреннюю работу системы были разработаны UML диаграммы развёртывания и деятельности. Диаграмма развёртывания изображена на рисунке 2.24.
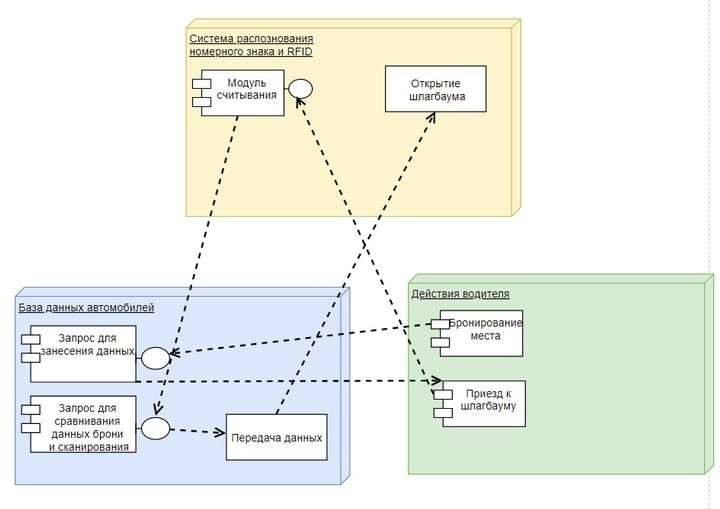
Рисунок 2.24 – UML диаграмма развёртывания
На диаграмме развёртывания показана внутренняя архитектура, разрабатываемой системы, а также связь между модулями системы. Прежде всего водитель бронирует место путём отправки СМС запроса, и система находит свободное место, бронирует его, затем водитель подьезжает к шлагбауму, и модули идентификации пользователя и транспортного средства. Для получения данных с камер, программа получает информацию непосредственно со считывающего устройства и камеры. Следующим шагом программа сравнивает данные автомобиля, на который забронировано место и отсканированный номерной знак с меткой на лобовом стекле, и если эти данные совпадают, то шлагбаум открываются, и автомобиль занимает забронированное раннее место.
Чтобы показать взаимодействие пользователя с системой парковки была разработана UML диаграмма деятельности (рисунок 2.25).
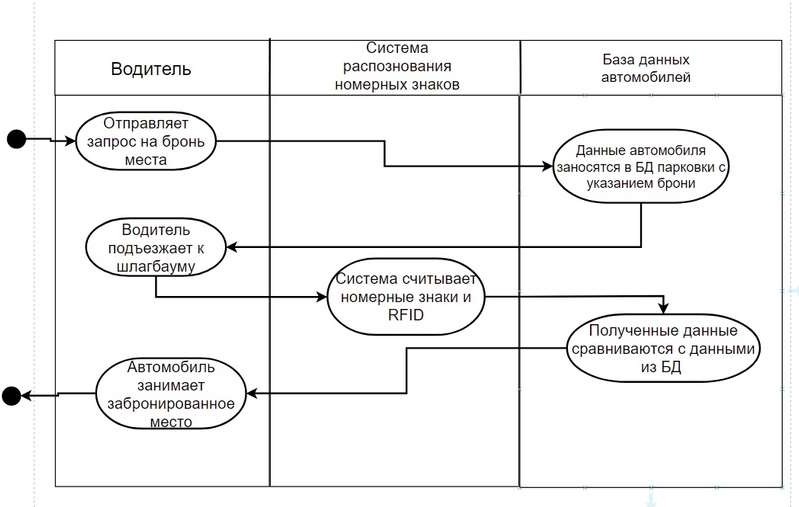
Рисунок 2.25 - UML диаграмма деятельности
На диаграмме деятельности показаны внутренние процесы взаимодействия системы с пользователем и обработки, поступаемой информации. Показано какие функции выполняются
водителем для того, чтобы припарковать автомобиль, и что при этом делает система распознавания номерных знаков и меток, для того чтобы водитель занял забронированное место.
На рисунке 2.26 изображена UML диаграмма классов, которая показывает внутреннюю связь процессов во время работы системы.

Рисунок 2.26 – UML диаграмма классов
Внутренние процессы программы представлены классами: распознование, форматирование, и сравнение. Каждый этот класс связан с другим. Некотоые функции классов распознавания и форматирования выполняется, по сути, параллельно. Атрибутами каждого класса являются функции, выполняющиеся внутри процесса.
Также, показывается количество связей между классами системы и логическая последовательность действий во время распознавания знаков.
Диаграмма классов по сути является алгоритмом действия для программы распознавания государственных номерных знаков, ведь именно в такой последовательности выполняются все действия внутри данной программы.
Выполненные UML диаграммы деятельности, размещения и классов отображают функции, выполняющиеся внутри программы и последовательность действий внутри системы, после
Пример: IO0SET = 0x0000FFFF будет устанавливать контакты P0.0 - P0.15 в логическую 1. Это не повлияет на другие контакты.
Регистр IO0CLR используется для установки выводов Port0 - P0 в логический 0.
Пример: IO0CLR = 0x0000FFFF будет устанавливать контакты P0.0 на P0.15 на логике 0. Это не повлияет на другие контакты.
Регистр IO1SET используется для установки выводов Port1-P1 в логическую 1.
Пример: IO1SET = 0x0000FFFF будет устанавливать контакты P1.0 на P1.15 в логике 1. Это не повлияет на другие контакты.
Регистр IO1CLR используется для установки выводов Port1-P1 в логический 0.
Пример: IO1CLR = 0x0000FFFF будет устанавливать контакты P1.0 на P1.15 в логической точке 0. Это не повлияет на другие контакты.
VSSVCCVEE
RSRWE
D0D1D2D3D4D5D6D7
На рисунке 2.21 изображена принципиальная схема блока микроконтроллера
Рисунок 2.21 – Принципиальная схема блока микроконтроллераСтоит отметить, что разработанный прототип автоматизированной парковки с внедрением системы распознавания государственных номеров может использоваться на всех стоянках, в том числе и возле кинотеатров, кафе и тд. Система удобна, так как с помощью системы распознавания государственных номеров может подобрать место для стоянки и закрывать и открывать шлагбаум. Система полностью автоматизирована, человеческие
ресурсы не нужны. Система наглядна и относительно дешевая по сравнению с существующими аналогами.
VSSVCCVEE
RSRWE
D0D1D2D3D4D5D6D7
Рисунок 2.22 – Функциональная схема блока микроконтроллера Обеспечивая производительность до 54 MIPS, имеют встроеннуюFlash-память объемом 128/256/512 кБ со 128-битной шиной, статическую оперативную память (SRAM) объемом 16/32/64 кБ, модуль ШИМ, многоканальный 10-битный модуль АЦП, 10 - битный модуль ЦАП, SPI, CAN, два UART (один UART с полным модемным интерфейсом), USB.
-
Выбор алгоритма распознования
Основными компонентами, используемыми в разрабатываемом системном оборудовании, предварительно являются ARM7 (LPC2148) [5], модуль GSM, RFID модуль и модуль распознавания номерных знаков. Микроконтроллер ARM7 сопряжен с GSM и RFID-модулем. Используя технологию GSM, мы можем проверить место для стоянки, а с помощью системы распознавания можем проверить государственный номер авто, используя соответствующие команд через SMS.
Инфракрасный датчик, который помещается на секции мест, проверяет их доступность. Если есть свободное место, пользователю отправляется соответствующее сообщение.
Сообщение включает номер парковочного места, продолжительность парковки, плату за парковку в зависимости от времени и защищенный код.
RFID технология включает в себя считывающие датчики, используемые для пропуска на стоянку и считывания суммы за парковку.
В рамках выполнения работы для непосредственного распознавания номерных знаков предлагается использование нейронной сети.
Когда объект сложно распознать, но он хорошо выделяемый, то зачастую единственным способом работы с ним является выделить его контуры, для определения что это за объект. В данное время существует более 10 алгоритмов, решающих задачу фильтрации контуров, мы перечислим основные 5 [4]:
-
оператор Кэнни; -
оператор Собеля; -
оператор Лапласа; -
оператор Прюитт; -
оператор Робертса.
Чаще всего используется именно Кэнни, который выделает контуры, при правильных настройках (рисунок 2.23).
Рисунок 2.23 - Использование оператора Кэнни
Каскад Хаара используется в методе Виолы—Джонса. Этот алгоритм, позволяет обнаруживать объекты на изображениях. Алгоритм хорошо справляется с распознаванием различных классов изображений. Основное преимущество детектора Хаара – это скорость. Благодаря высокой скорости обработки изображения, можно с лёгкостью обрабатывать видео в потоке. Детектор Хаара используется для распознавания для большого количества классов объектов.
- 1 2 3 4 5 6 7 8 9 ... 15
Разработка UML диаграмм
Для того чтобы наглядно продемонстрировать внутреннюю работу системы были разработаны UML диаграммы развёртывания и деятельности. Диаграмма развёртывания изображена на рисунке 2.24.
Рисунок 2.24 – UML диаграмма развёртывания
На диаграмме развёртывания показана внутренняя архитектура, разрабатываемой системы, а также связь между модулями системы. Прежде всего водитель бронирует место путём отправки СМС запроса, и система находит свободное место, бронирует его, затем водитель подьезжает к шлагбауму, и модули идентификации пользователя и транспортного средства. Для получения данных с камер, программа получает информацию непосредственно со считывающего устройства и камеры. Следующим шагом программа сравнивает данные автомобиля, на который забронировано место и отсканированный номерной знак с меткой на лобовом стекле, и если эти данные совпадают, то шлагбаум открываются, и автомобиль занимает забронированное раннее место.
Чтобы показать взаимодействие пользователя с системой парковки была разработана UML диаграмма деятельности (рисунок 2.25).
Рисунок 2.25 - UML диаграмма деятельности
На диаграмме деятельности показаны внутренние процесы взаимодействия системы с пользователем и обработки, поступаемой информации. Показано какие функции выполняются
водителем для того, чтобы припарковать автомобиль, и что при этом делает система распознавания номерных знаков и меток, для того чтобы водитель занял забронированное место.
На рисунке 2.26 изображена UML диаграмма классов, которая показывает внутреннюю связь процессов во время работы системы.
Рисунок 2.26 – UML диаграмма классов
Внутренние процессы программы представлены классами: распознование, форматирование, и сравнение. Каждый этот класс связан с другим. Некотоые функции классов распознавания и форматирования выполняется, по сути, параллельно. Атрибутами каждого класса являются функции, выполняющиеся внутри процесса.
Также, показывается количество связей между классами системы и логическая последовательность действий во время распознавания знаков.
Диаграмма классов по сути является алгоритмом действия для программы распознавания государственных номерных знаков, ведь именно в такой последовательности выполняются все действия внутри данной программы.
Выполненные UML диаграммы деятельности, размещения и классов отображают функции, выполняющиеся внутри программы и последовательность действий внутри системы, после