ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 09.11.2023
Просмотров: 77
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Структурный анализ механизма
| Обозначения данных | | Массы звеньев | ||
| φ, гр | 40 | | OA, кг | 1.5 |
| OA, мм | 100 | | ACD, кг | 4.8 |
| АС, мм | 180 | | СO1, кг | 14.0 |
| CD, мм | 70 | | DB, кг | 11.5 |
| AD, мм | 90 | | Ползун В, кг | 40 |
| СO1, мм | 300 | | Технологическое усилие F5, кΗ | 750 |
| DB, мм | 750 | | | |
| а, мм | 150 | | | |
| b, мм | 325 | | | |
| n1 (OА), мин-1 | 180 | | | |
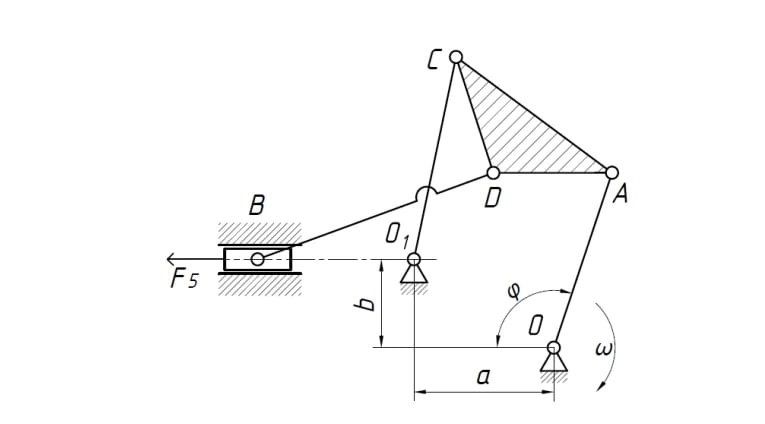
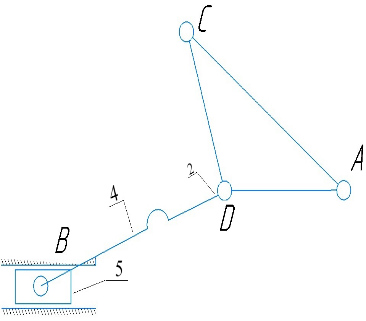
Рисунок 1 – структурная схема механизма
| Параметры привода | |
| Открытая передача (место установки) | Цепная (тихоходный вал) |
| MИ, Н (На входном валу исполнительного механизма) | 19 |
| ωИ, рад/с | ωИ = ωOA (направления угловых скоростей совпадают) |
| Срок службы привода h, тыс. час. | 11 |
Назначение механизма: преобразование вращательного движения кривошипа в поступательное движение ползуна.
Таблица 1 – звенья механизма
| Номер звена | Название звена | Подвижность | Число подвижных звеньев |
| 0 | стойка | неподвижное | n=5 |
| 1 | кривошип | подвижное | |
| 2 | шатун | подвижное | |
| 3 | коромысло | подвижное | |
| 4 | шатун | подвижное | |
| 5 | ползун | подвижное |
Таблица 2 – кинематические пары механизма
| Обозначения | Соединяемые элементы | Тип пары | Индекс пары | Класс пар | |||
| Вид движения | Характер соединения | Подвижность | пятый | четвёртый | |||
| O | 0;1 | вращ. | низшая | одноподв. | В10 | p5=7 | p4=0 |
| D | 1;2 | вращ. | В21 | ||||
| A | 2;3 | вращ. | В32 | ||||
| O1 | 3;0 | вращ. | В30 | ||||
| C | 2;4 | вращ. | В42 | ||||
| B | 4;5 | вращ. | В54 | ||||
| B0 | 5;0 | поступ. | П50 | ||||
Степень подвижности механизма:

Таблица 3 – начальный механизм и группы Ассура
| Схема | Название, класс, порядок, вид | Число звеньев | Число кинематических пар | Форма строения | |
| Всего | Поводковых | ||||
 | Начальный вращательный механизм I класса | 1 | 1 | 0 |  |
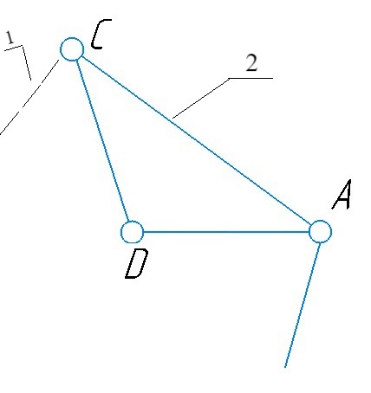 | 2-звенная, 2-поводковая группа Ассура II класса с 3 вращательными парами (ВВВ) | 2 | 3 | 2 |  |
 | 2-звенная, 2-поводковая группа Ассура II класса с 2 вращательными и 1 поступательной парой (ВПП) | 2 | 3 | 2 |  |
2 Кинематический анализ механизма

Определим скорости всех точек звеньев:
-
Скорости стоек :
:

-
Скорость точки A:




-
Скорость точки С

 строится из точки “a” перпендикулярно AC и из O перпендикулярно
строится из точки “a” перпендикулярно AC и из O перпендикулярно  . Проведя вектор из O в точку пересечения найдем истинную скорость точки С.
. Проведя вектор из O в точку пересечения найдем истинную скорость точки С.Из плана ускорений имеем:






-
Скорость точки D:

Из плана скоростей имеем:






-
Скорость точки B:

Т.к. точка B движется поступательно горизонтально, то из О проводим горизонтальную прямую.
Искомая скорость B найдется на пересечении с перпендикуляром BD, выходящего из D
Из плана скоростей имеем:




Ускорения точек звеньев
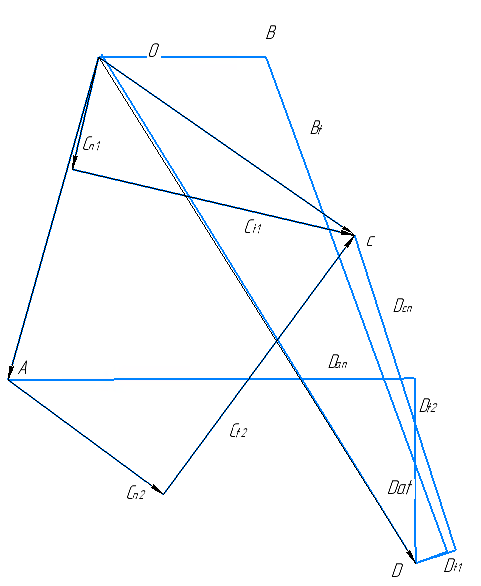
Рисункок. План ускорений
-
Ускорения стоек :
:
-
Ускорение точки A найдём как:


-
Ускорение точки C найдём как:
Нормальные составляющие:


----------------------------------------------------------------------------------
Из плана ускорений имеем:

Полное ускорение точки С:
Угловое ускорение звена
 :
:
4) Ускорение точки D найдём как:


Из плана ускорений имеем:
Полное ускорение точки D:

Угловое ускорение звена CD:
5) Ускорение точки B: