Файл: Курсовая работа по теории механизмов и машин " Кулачковые механизмы".docx
Добавлен: 09.11.2023
Просмотров: 56
Скачиваний: 5
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Балтийская государственная академия рыбопромыслового флота
Судомеханический факультет
Кафедра инженерной механики и технологии материалов
Курсовая работа
по теории механизмов и машин
“Кулачковые механизмы”
ВАРИАНТ_________________________
Выполнил__________________________
Группа____________________________
Проверил__________________________
Калининград 2021
-
Теоретическая составляющая
Кулачковый механизм – механизм, в состав которого входит кулачок.
Кулачок – звено, имеющее элемент высшей пары, выполненный в виде поверхности переменной кривизны.
Толкатель – прямолинейно движущееся выходное звено.
Коромысло – вращающееся (качающееся) выходное звено.
Фазы работы механизма – фаза подъема, фаза опускания, фаза верхнего выстоя, фаза нижнего выстоя.
jп – фазовый угол подъема – при повороте кулачка на этот угол толкатель перемещается из крайнего нижнего положения в крайнее верхнее.
j0 – фазовый угол опускания – при повороте кулачка на этот угол толкатель перемещается из крайнего верхнего положения в крайнее нижнее.
jв.в. – фазовый угол верхнего выстоя, jн.в. – фазовый угол нижнего выстоя – при повороте кулачка в пределах этих углов толкатель остается в верхнем или нижнем положениях.
Функция положения выходного звена – зависимость перемещения этого звена механизма от угла поворота кулачка (s = s(j) или = (j)).
Аналог скорости выходного звена – первая производная перемещения этого звена по углу поворота кулачка (
 или
или  )
)Аналог ускорения выходного звена – первая производная аналога скорости этого звена по углу поворота кулачка (
 или
или  ) или вторая производная перемещения этого звена механизма по углу поворота кулачка (
) или вторая производная перемещения этого звена механизма по углу поворота кулачка (
 или
или  ).
).2. Основные виды плоских кулачковых механизмов.
Входным звеном кулачкового механизма обычно является кулачок, т. е. звено, которому принадлежит элемент высшей пары, выполненный в виде поверхности переменной кривизны. Прямолинейно движущееся выходное звено называется толкателем, а вращающееся (качающееся) – коромыслом. Для уменьшения трения о поверхность кулачка выходное звено часто снабжается роликом.
Постоянное соприкасание звеньев в высшей паре обеспечивается силовым или геометрическим замыканием. При силовом замыкании постоянное прижатие звеньев происходит под действием пружины, силы тяжести, давления жидкости и т. п. При геометрическом замыкании возможность отрыва одного звена от другого устраняется конструктивно.
Кроме подразделения кулачковых механизмов по способу замыкания высшей пары они различаются также по виду движения звеньев, по виду элемента высшей пары (плоскость, поверхность, линия, точка) и др. На рис. 1 представлены 9 вариантов плоских механизмов с вращающимся входным звеном.
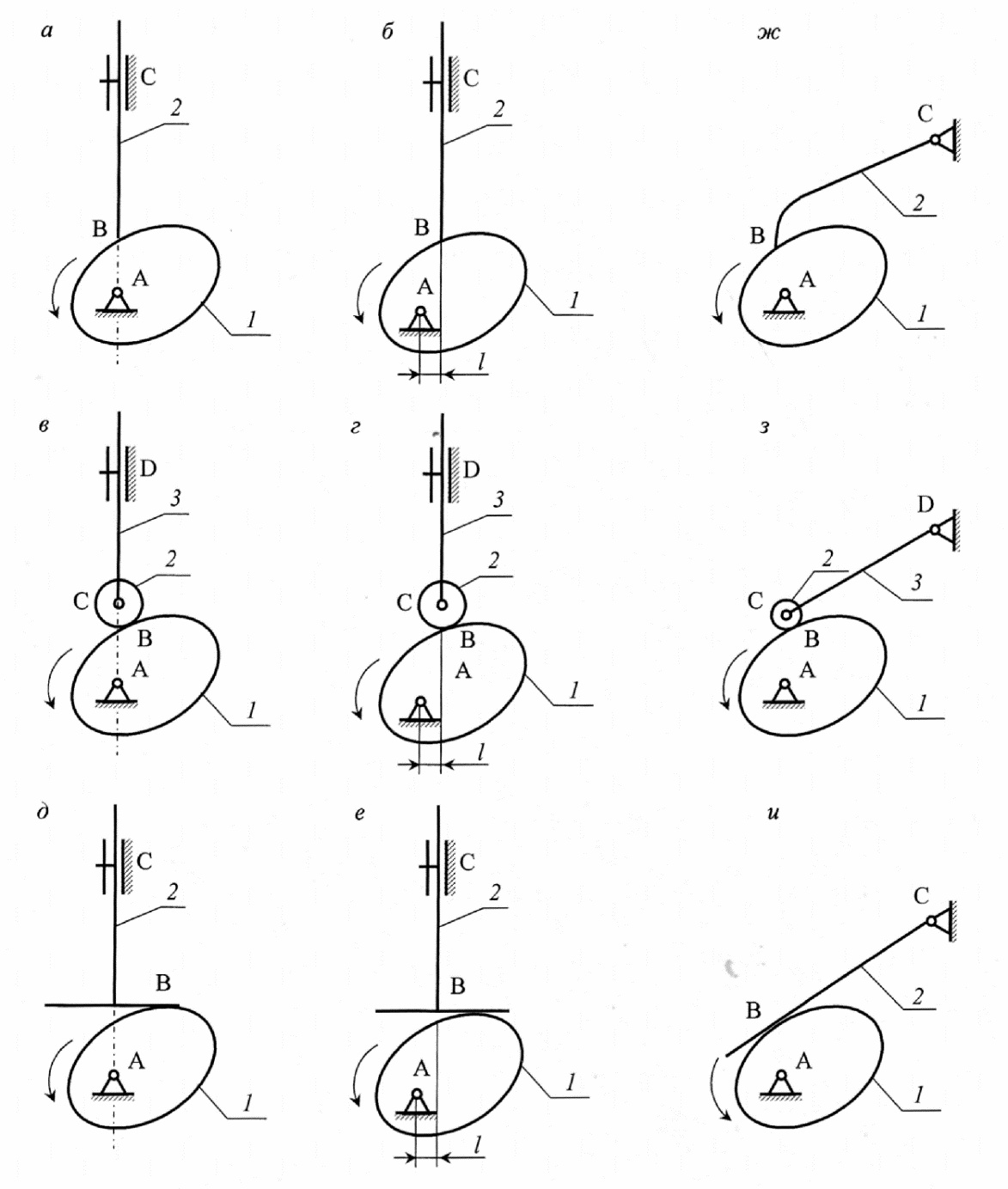
Рис. 1
3. Структурный анализ заданного механизма (рис. 2).
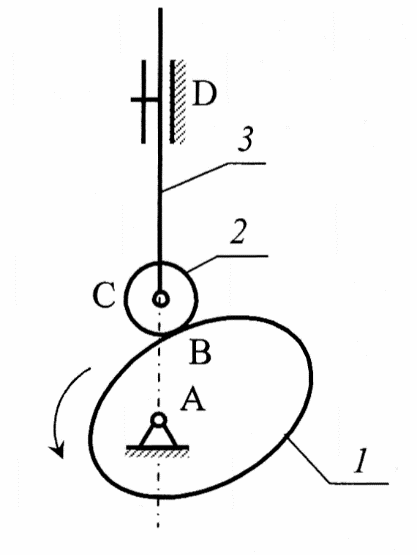
Рис. 2
Таблица кинематических пар.
| № п/п | Обозначение КП | №№ звеньев | Вид движения | Вид КП | Класс КП |
| 1 | A | 1 – 0 | В | НКП | V |
| 2 | B | 1 – 2 | ВП | ВКП | IV |
| 3 | C | 2 – 3 | В | НКП | V |
| 4 | D | 3 – 0 | П | НКП | V |
Степень подвижности механизма:
p1 = 3, p2 = 1, n = 3.
W = 3×n – 2×p1 – p2.
W = 3×3 – 2×3 – 1 = 2.
Степень подвижности получилась равной 2, т. е. механизм обладает лишней степенью свободы. Этой степени свободы соответствует возможность вращения ролика 2 вокруг оси С. Уберем ролик и для введения кулачка 1 в кинематическую пару B с толкателем 3, конструктивный профиль кулачка 1 заменен геометрическим местом относительных положений центра ролика 2. Теперь после устранения ролика число подвижных звеньев стало равно двум (n = 2), число пар V класса – двум, а число пар IV класса – одному (Рис. 3б).
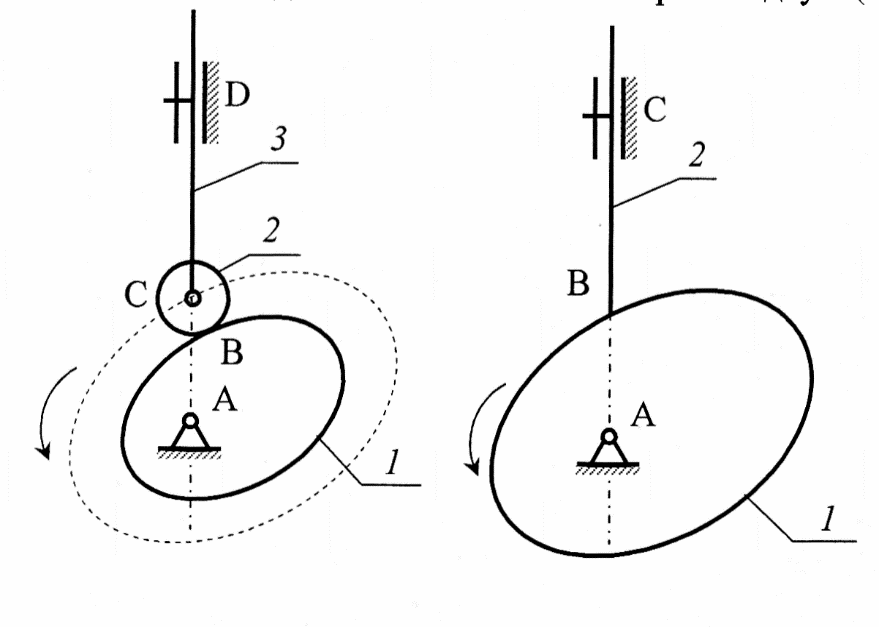
а) б)
Рис. 3
| № п/п | Обозначение КП | №№ звеньев | Вид движения | Вид КП | Класс КП |
| 1 | A | 1 – 0 | В | НКП | V |
| 2 | B | 1 – 2 | ВП | ВКП | IV |
| 3 | C | 2 – 0 | П | НКП | V |
Степень подвижности механизма:
p1 = 2, p2 = 2, n = 1
W = 3×n – 2×p1 – p2
W = 3×2 – 2×2 – 1 = 1
т. е. механизм обладает одной степенью свободы.
Заменяющий механизм – кривошипно-ползунный механизм (Рис. 4).
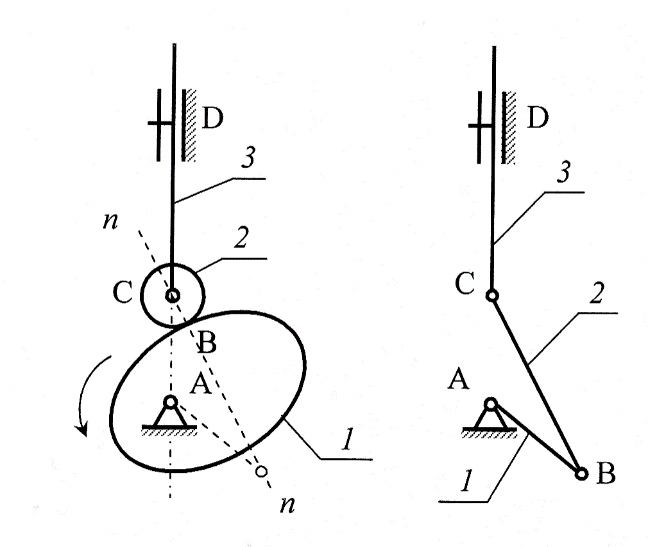
а) б)
Рис. 4
| № п/п | Обозначение КП | №№ звеньев | Вид движения | Вид КП | Класс КП |
| 1 | A | 1 – 0 | В | НКП | V |
| 2 | B | 1 – 2 | В | НКП | V |
| 3 | C | 2 – 3 | В | НКП | V |
| 4 | D | 3 – 0 | П | НКП | V |
Степень подвижности заменяющего механизма:
p1 = 4, p2 = 0, n = 3
W = 3n – 2p1 – p2
W = 3×3 – 2×4 = 1
т. е. кривошипно-ползунный механизм обладает одной степенью подвижности.
4. Принципиальная схема прибора.
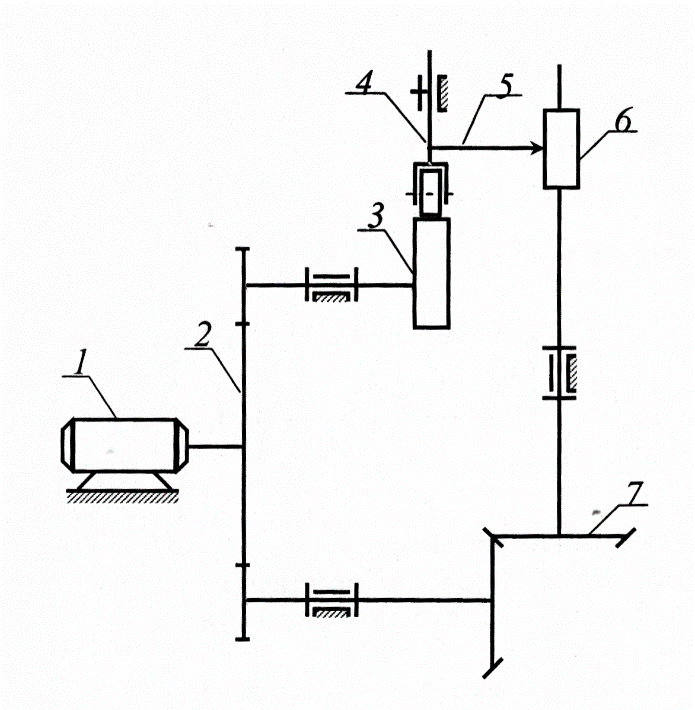
Рис. 5
1 – электродвигатель 2 – цилиндрическая передача
3 – кулачок 4 – толкатель
5 – перо (записывающее устройство)
6 – барабан записывающего устройства
7 – коническая передача
5. Исходные данные и расчетные формулы (согласно выданным вариантам)
Smax = H1 = H2 = mj = (задаются) Dj =10 2Dj = (Dj)2 = Dj¢ = 2Dj¢ = (Dj¢)2 =
mS = mS¢ = , mS¢¢ = .
 ,
,  ,
,  .
.Здесь обозначено:
Smax – максимальный ход толкателя (задается);
[Smax] – значение максимального хода толкателя на диаграмме перемещений S = S();
H1 – отстояние полюса дифференцирования от оси ординат диаграммы S = S();
H2 – отстояние полюса дифференцирования от оси ординат диаграммы S = S();
– масштабный коэффициент по оси абсцисс кинематических диаграмм (задается);
() – интервалы изменения угла на диаграммах (задаются);
S, S, S – масштабные коэффициенты по оси ординат кинематических диаграмм (вычисляются).
6. Последовательность выполнения курсовой работы
В отчет включаются титульный лист, страницы 2-5 теоретического материала все расчёты, выполненные курсантом. (А так же миллиметровка) и выводы по проекту.
1. Нанести на лист «миллиметровки» соответственно с вариантом задания график изменения движения записывающего устройства, провести координатные оси
, разметить их в соответствии с заданными интервалами изменения параметров.
3. Провести на листе также оси координат для построения графиков S = S () и S = S(), разметив их также как и оси координат графика S = S ().
4. Выполнить процедуру графического дифференцирования графикаS = S () для построения диаграммы S = S (), а затем, точно так же, продифференцировав полученный график, построить диаграмму S = S() (согласно приложению 1). При этом, ориентируясь на полученные точки, провести плавные кривые, обеспечивая дифференциальное соответствие всех трех графиков. (Приложение 1)
5. На графиках в заданных положениях провести ординаты, отметив точки на кривых, и замерить. Результаты замеров заносятся в колонки 3, 4 и 5 в таблицы (как разделе 7).
6. Значения перемещений Si = [Si]S, аналогов скорости Si = [Si]S и ускорения Si = [Si]S, указываются в столбцах 6, 7, 8 таблицы раздела 7 (умножить полученные данные на коэффициент mS).
7. По приведенным в разделе 5 формулам численного дифференцирования вычисляются те же параметры и вносятся в колонки 9, 10 и 11. Таким образом, можно сравнивать приведенные результаты и давать им оценку.
7. Примеры выполнения работы
Кинематические параметры
| | | [Si] | [S¢i] | [S¢¢i] | Si | S¢i | S¢¢i | Si | S¢i | S¢¢i |
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 |
| 0 | 0 | 0 | 0 | 32,0 | 0 | 0 | 69,7 | -1,7 | 59,0 | 68,2 |
| 1 | 10 | 1,2 | 13,7 | 28,5 | 0,6 | 12,4 | 62,0 | 8,6 | 59,0 | 54,2 |
| 2 | 20 | 6,0 | 20,7 | 20,2 | 3,0 | 19,7 | 44,0 | 17,2 | 39,3 | 37,0 |
| 3 | 30 | 13,2 | 25,8 | 8,7 | 6,6 | 24,6 | 18,9 | 21,5 | 9,8 | 18,1 |
| 4 | 40 | 21,0 | 26,3 | -7,2 | 10,5 | 25,0 | -15,7 | 23,5 | 13,1 | 18,1 |
| 5 | 50 | 29,6 | 21,7 | -22,0 | 14,8 | 20,7 | -47,9 | 27,8 | -29,5 | -24,6 |
| 6 | 60 | 36,4 | 13,5 | -33,2 | 18,2 | 12,9 | -72,3 | 14,9 | -52,5 | -74,8 |
| 7 | 70 | 40,0 | 0 | -40,0 | 20,0 | 0 | -87,1 | 1,7 | -98,4 | -80,5 |
| 8 | 80 | 37,5 | -17,2 | -35,2 | 18,8 | -16,4 | -76,6 | -13,2 | -72,1 | -72,2 |
| 9 | 90 | 30,8 | -28,0 | -23,0 | 15,4 | -26,7 | -50,1 | -23,5 | -45,9 | -45,0 |
| 10 | 100 | 21,3 | -30,4 | 0 | 10,6 | -28,9 | 0 | -28,9 | -16,4 | -9,7 |
| 11 | 110 | 10,6 | -26,2 | 21,0 | 5,3 | -24,9 | 45,7 | -26,9 | 39,3 | 39,3 |
| 12 | 120 | 2,4 | -13,5 | 28,5 | 1,2 | -12,9 | 62,0 | -15,2 | 72,2 | 72,2 |
| 13 | 130 | 0 | 0 | 32,0 | 0 | 0 | 69,7 | -1,7 | 68,2 | 68,2 |