ВУЗ: Казахская Национальная Академия Искусств им. Т. Жургенова
Категория: Книга
Дисциплина: Не указана
Добавлен: 03.02.2019
Просмотров: 21635
Скачиваний: 19
4-20 Microphone Devices and Systems
•
The short length of transverse corrugations may reduce the need for laborious manual stretch-
ing and tuning, and may greatly reduce the downward drift of tuning with time.
•
The longitudinal corrugations may reduce or eliminate transverse resonances, which produce
small dips and peaks in frequency response above 8000 Hz.
•
The short length of the ribbon makes the polar pattern in the vertical plane more uniform with
frequency.
Most ribbon microphones have low magnetic-hum sensitivity because the ribbon circuit is
easily designed to be hum-bucking. Ribbon microphones have low vibration sensitivity because
the moving mass is very low.
4.1.3a
Combination Pressure and Pressure-Gradient Microphones
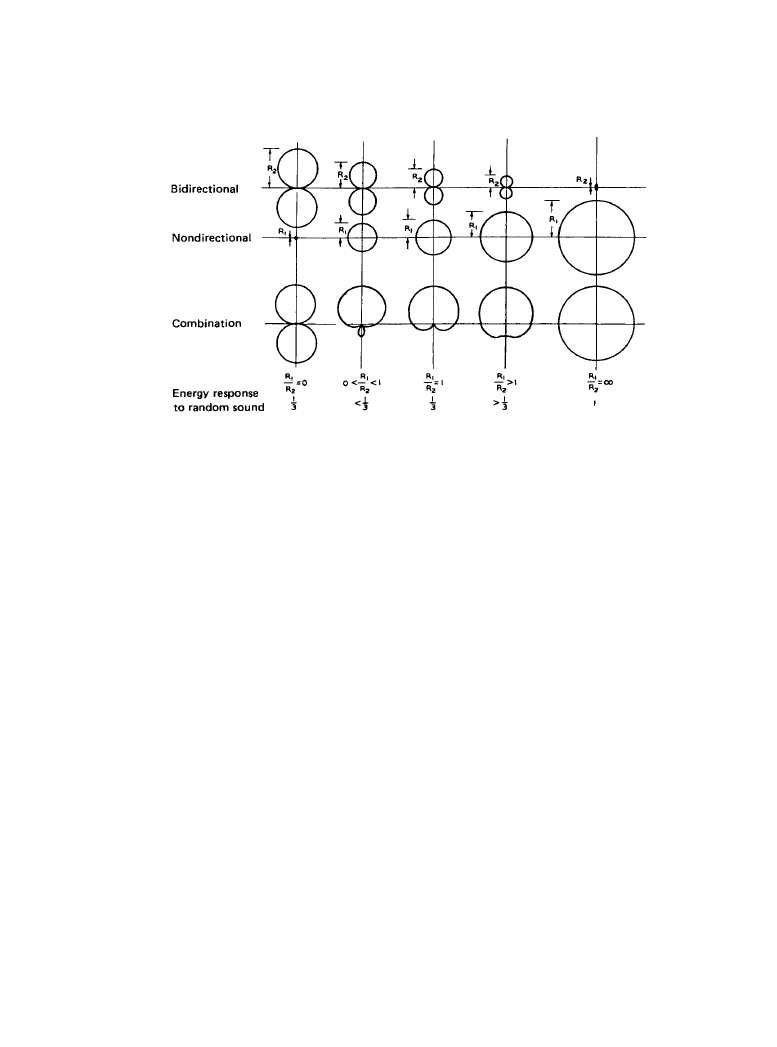
Figure 4.1.14 illustrates graphically how the outputs of a bidirectional and a nondirectional
microphone transducer can be mixed to obtain three unidirectional polar patterns. Actually, there
are an infinite number of unidirectional patterns that may be obtained. The three patterns shown
are hypercardioid, cardioid, and limacon, from left to right. The energy responses to random
sounds (such as room noise and reverberant sound) are also shown relative to the nondirectional,
which is assigned a value of unity. Note that the bidirectional and the cardioid have exactly the
same response, but the hypercardioid is superior to both of them in discrimination against ran-
dom sound. A number of unidirectional microphones produced today are hypercardioids, but the
cardioid remains the most popular. The limacon is not as popular, and so to obtain this pattern a
microphone with variable directivity is needed. An alternate way to obtain a unidirectional pat-
tern is by using a single transducer with an appropriate acoustical phase-shifting system. Some
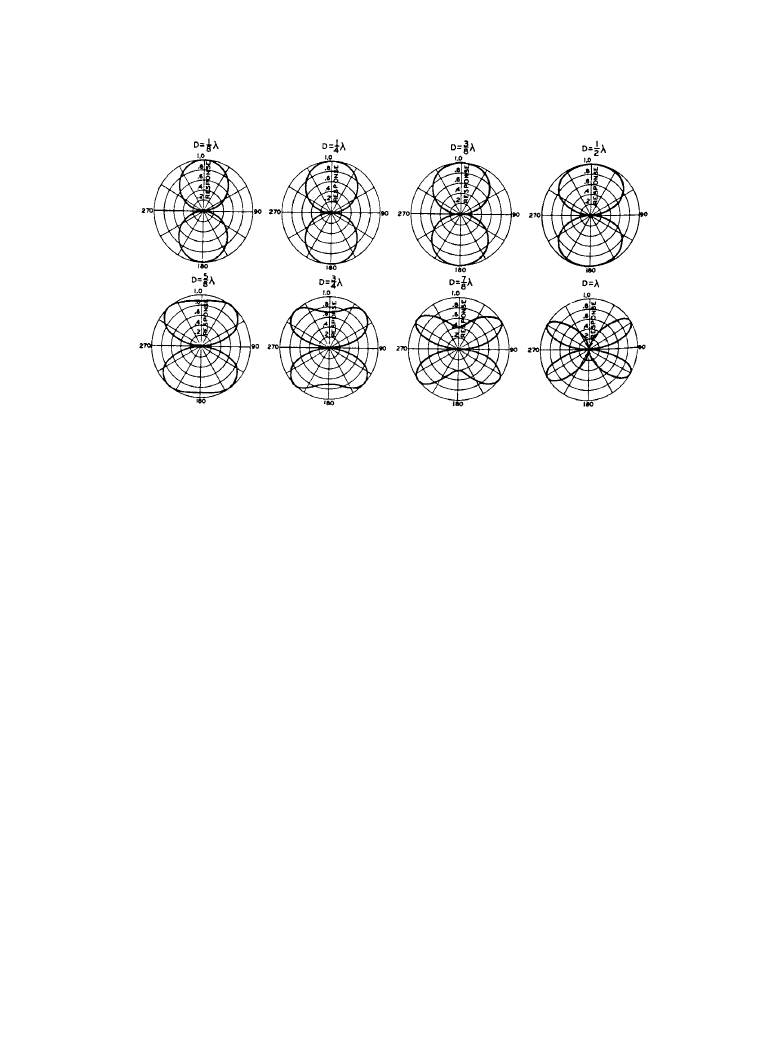
Figure 4.1.13
Directional characteristics of a pressure-gradient microphone as a function of
dimensions and wavelength. The polar graph depicts output, in volts, as a function of angle, in
degrees. The maximum response is arbitrarily chosen as unity. (
From [10]. Used with permission.)
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)
Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
Microphones
Microphones 4-21
single-transducer microphones have a mechanically variable delay system so that the pattern can
be varied from bidirectional to cardioid to nondirectional.
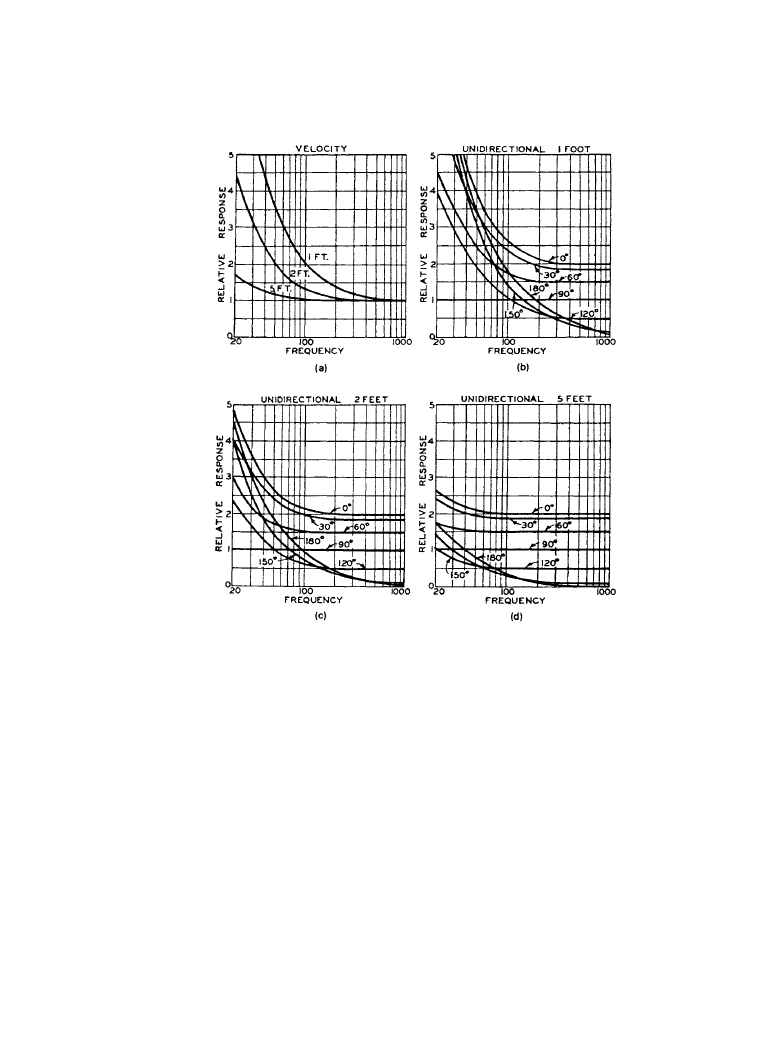
Frequency Response as a Function of Distance
The low-frequency response of the velocity microphone is accentuated when the distance
between source and microphone is less than a wavelength. This happens to a lesser degree with
the unidirectional microphone [2]. Figure 4.1.15 gives curves for velocity and unidirectional
microphones. If the curves for 0° are plotted to a decibel scale, the slopes follow linear 6-dB-per-
octave characteristics. The unidirectional curves exhibit a corner (+3-dB) frequency that is one
octave higher than those of the velocity microphone. The +3-dB frequencies rise one octave
when the distance is halved. Therefore, for each distance a simple resistance-capacitance rolloff
equalizer can be designed to provide flat response. This so-called proximity effect pertains to all
pressure-gradient (velocity) and combination pressure and pressure-gradient (unidirectional car-
dioid) microphones to the same degree. These characteristics are essentially invariant between
models of microphones. The exception to these rules is the variable-distance unidirectional
microphone, which has a reduced proximity effect.
Dual-Diaphragm Condenser Polydirectional Microphone
The dual-diaphragm microphone vibrating system consists of a pair of diaphragms, each spaced
a small distance from the backplate, as in the pressure microphones described previously [11].
The space behind each diaphragm provides acoustical resistance damping as well as acoustical
capacitance (stiffness). The cavities behind the diaphragms are interconnected by small holes in
the backplate. The phase shift in this system plus the variable electrical polarizing system make
possible a variety of directional patterns.
Figure 4.1.14
Directional diagrams of various combinations of bidirectional and nondirectional
microphones and energy response to random sounds. (
From [2]. Used with permission.)
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)
Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
Microphones
4-22 Microphone Devices and Systems
With switch position 1, the diaphragms are oppositely polarized, and the transducer has a
bidirectional pattern. This may be deduced by observing that sound incident at 90° or 270° will
produce equal but oppositely phased outputs from each diaphragm, and thus the net voltage out-
put is a null.
With the switch at position 5, the diaphragms are similarly polarized and the outputs are in
phase at all angles of incidence, resulting in an omnidirectional pattern. At intermediate switch
settings, a variety of unidirectional patterns are obtained. Note that at switch setting 3 a cardioid
pattern is obtained with maximum polarizing voltage E
0
on the front diaphragm and 0 V on the
back diaphragm. The unenergized diaphragm and the acoustical capacitance and resistance of
Figure 4.1.15
Microphone characteristics: (
a) relative voltage output of a velocity (or pressure-gra-
dient) microphone as compared with a nondirectional pressure microphone for distances of 1, 2,
and 5 ft; (
b–d) relative voltage output of a unidirectional microphone as compared with a nondirec-
tional pressure microphone for distances of 1, 2, and 5 ft and for various angles of incident sound.
(
From [2]. Used with permission.
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)
Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
Microphones
Microphones 4-23
the backplate form a phase-shift network similar to the rear sound aperture of a single-element
unidirectional microphone.
The frequency response of the polydirectional microphone will be flat, and the polar pattern
uniform with frequency, if the diaphragms are carefully matched and the resistance elements are
the controlling acoustical impedances. As in the case of the velocity microphone, acoustical
characteristics deteriorate as the frequency approaches that where the path length from front to
back approaches a wavelength of sound. A diameter of 0.5 in (12.5 mm) maximum is required
for uniform directional characteristics to 15,000 Hz. However, the axial frequency response of a
1-in- (25-mm-) diameter polydirectional microphone can be made uniform to 20,000 Hz, so
some uniformity of polar pattern is often traded for the higher sensitivity and lower noise level
obtained with the larger-diaphragm transducers.
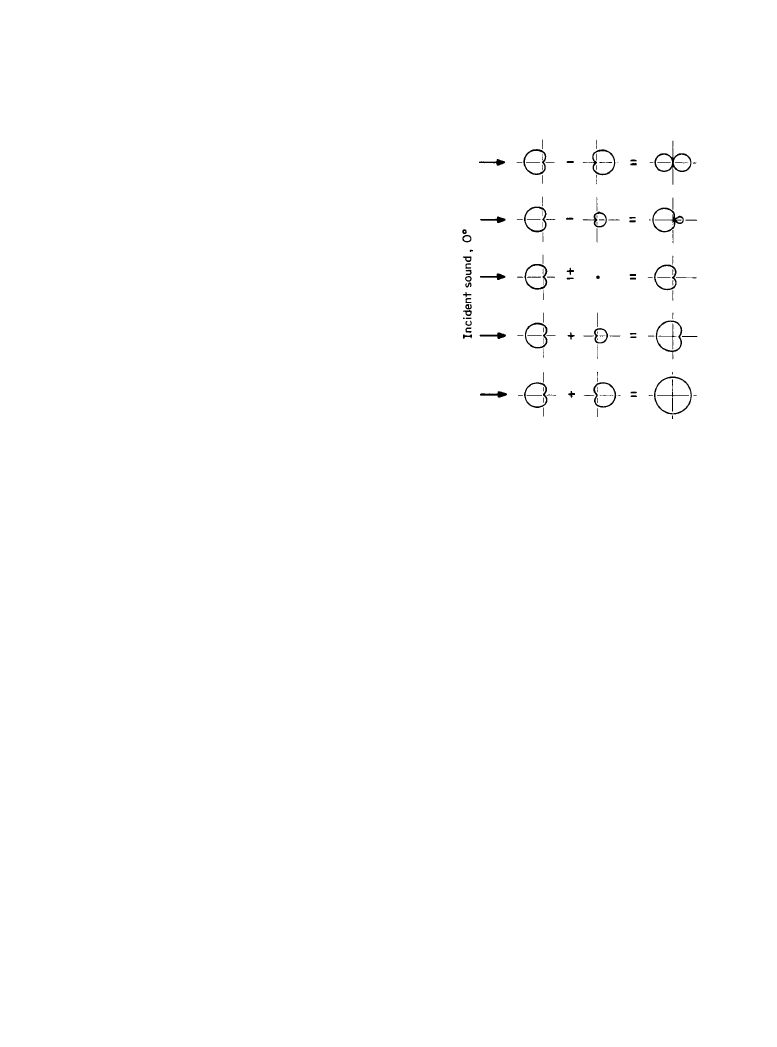
Twin-Cardioid-Element Polydirectional Condenser Microphone
The dual-diaphragm polydirectional condenser microphone may be thought of as a superposition
of two single-diaphragm cardioid microphones back to back. Figure 4.1.16 shows how two car-
dioid capsules placed back to back will function as a polydirectional microphone. As in the case
of the dual-diaphragm transducer, the front transducer has maximum polarizing voltage E
0
at all
times and maintains cardioid response with maximum sensitivity. The voltage on the rear trans-
ducer is varied down to zero and up to +E
0
, the same as in the dual-diaphragm transducer. The
same polar patterns are obtained. Likewise, the same effect can be obtained by mixing the indi-
vidual audio outputs in the various amplitude ratios and polarities.
This polydirectional microphone obviously has the most uniform acoustical properties in the
cardioid mode because only one transducer is involved. In the other modes, the spacing between
capsules, which may be 0.4 to 1.2 in (10 to 30 mm), comes into play, and the polar characteristics
at high frequencies become nonuniform.
Figure 4.1.16
Condenser polydirectional microphone
using two cardioid transducers back to back. (
After
[11].)
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)
Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
Microphones

4-24 Microphone Devices and Systems
4.1.3b
Single-Element Unidirectional Microphones
The classic single-element ribbon polydirectional microphone (RCA type 77-DX) is shown in
Figure 4.1.17. The ribbon is located between the pole pieces of a relatively large horseshoe mag-
net. The flux density is 13,000 G (13 Wb/m
2
), which results in high sensitivity in all modes of
operation. The vertical tube behind the magnet leads to a damped pipe (acoustic line) in the cen-
tral body of the microphone. The acoustic line has a developed length of about 3 ft (1 m) and is
lightly packed with ozite so as to provide a constant acoustical resistance to the ribbon over a
wide frequency range. The vertical connector tube is D-shaped in cross section and has a long,
narrow slot that opens to the rear. This slot is covered with an organdy screen, which is inside the
tube. The rotary shutter varies the effective size of the slot or rear sound opening. This provides
six polar patterns by means of a detent, but the actual number of available patterns is infinite.
The shutter is shown at the bidirectional setting with the slot fully uncovered. When the shutter is
rotated 60° counterclockwise, the slot is fully covered and a nondirectional pattern is obtained.
An additional 60° rotation results in the slot being about 10 percent uncovered, which yields a
cardioid pattern.
The simplified acoustical equivalent circuit of the microphone (Figure 4.1.17) consists of the
following elements:
•
M
R
= inertance (acoustical mass) of ribbon plus air load on ribbon
•
R
L
= acoustical resistance of air load on ribbon
•
M
S
= inertance of air in slot, including screens
•
R
S
= acoustical resistance of air in slot, including screens
•
R
P
= acoustical resistance of acoustic line
•
P
1
= front sound pressure
•
P
2
= rear sound pressure
The circuit applies to the frequency range above ribbon resonance, where the acoustical
capacitive reactance of the ribbon is negligible. When the shutter fully uncovers the slot, the
impedance of M
S
+ R
S
becomes very small and short-circuits R
P
. Then the circuit becomes that
of a pressure-gradient (velocity) microphone. The quantity (P
1
– P
2
) is the input pressure gradi-
ent. The acoustical circuit impedance is that of the ribbon plus air load and is inductive or mass-
controlled. This results in a constant volume current U in (M
R
+ R
L
), constant ribbon velocity
versus frequency, and uniform ribbon output voltage. The polar pattern is bidirectional or figure-
eight.
With the shutter fully closed, the impedance of M
S
+ R
S
becomes very large; so P
2
no longer
drives the ribbon circuit. The acoustic line resistance R
P
is large compared with the impedance of
(M
R
+ R
L
); so the volume current U is given by
(4.1.8)
This means that the microphone is pressure-responsive and has a nondirectional polar pattern.
With the shutter set for a cardioid pattern, part of the ribbon volume current U flows through
R
P
and part through (M
S
+ R
S
). Thus, the ribbon is partly controlled by P
1
and the line resistance
U
p
1
R
p
------
=
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)
Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
Microphones