ВУЗ: Казахская Национальная Академия Искусств им. Т. Жургенова
Категория: Книга
Дисциплина: Не указана
Добавлен: 03.02.2019
Просмотров: 21636
Скачиваний: 19
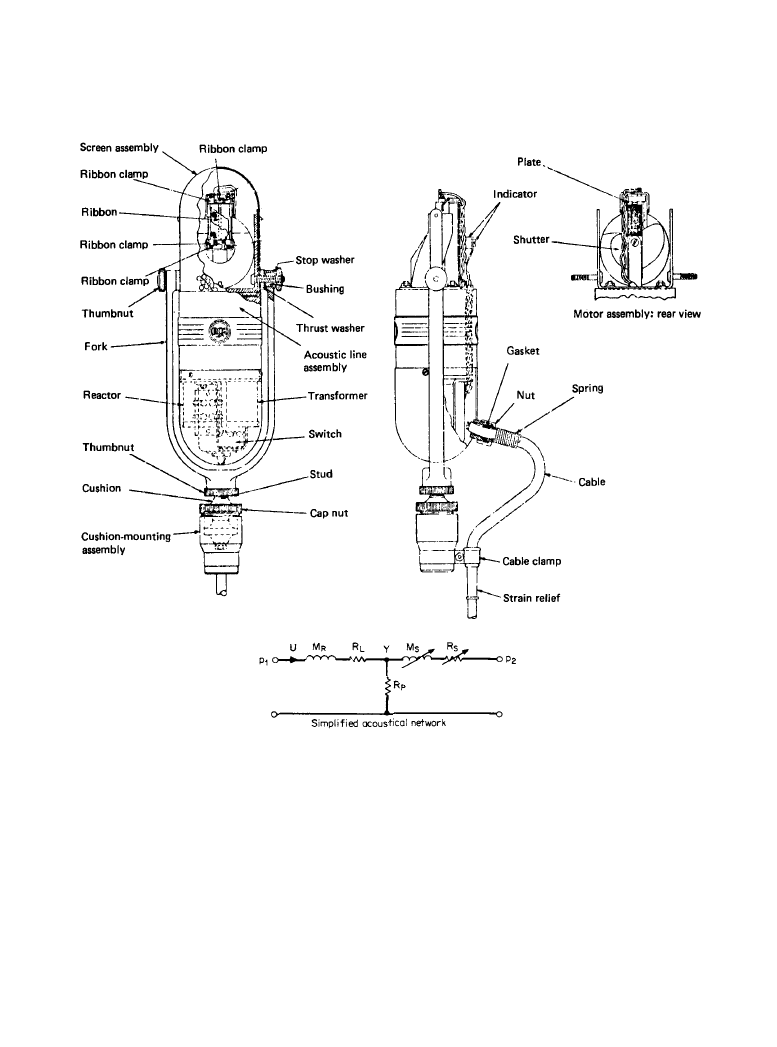
Microphones 4-25
R
P
and is pressure-responsive. The balance of the ribbon volume current U flows through (M
S
+
R
S
); so the transducer is partly velocity-responsive. The shutter setting for a cardioid pattern is at
a critical point where the phase shift through (M
S
+ R
S
) is such that sound incident from 180°
arrives at point Y somewhat delayed in time so as to match the phase of sound at P
1
. Thus U = 0,
a null in response occurs at 180°, and a cardioid pattern is obtained. This is the principle by
which single-element unidirectional electrodynamic microphones operate.
Three additional directional patterns are detent-selectable. The axial frequency response at
the cardioid setting is reasonably flat from 30 to 15,000 Hz. The response at the bidirectional set-
Figure 4.1.17
Ribbon polydirectional microphone and acoustical network (RCA type 77-DX).
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)
Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
Microphones
4-26 Microphone Devices and Systems
ting slopes downward with frequency, whereas the response at the nondirectional setting slopes
upward. This is a limitation of the ribbon polydirectional microphone.
Unidirectional Condenser Microphone
The unidirectional condenser microphone incorporates a prepolarized capsule where the electret
is on the backplate [4] and [12]. The unidirectional capsule backplate has holes which communi-
cate through an acoustic resistance screen into the case volume (normally having a closed bottom
end) and to the atmosphere through resistance screens and rear entry ports.
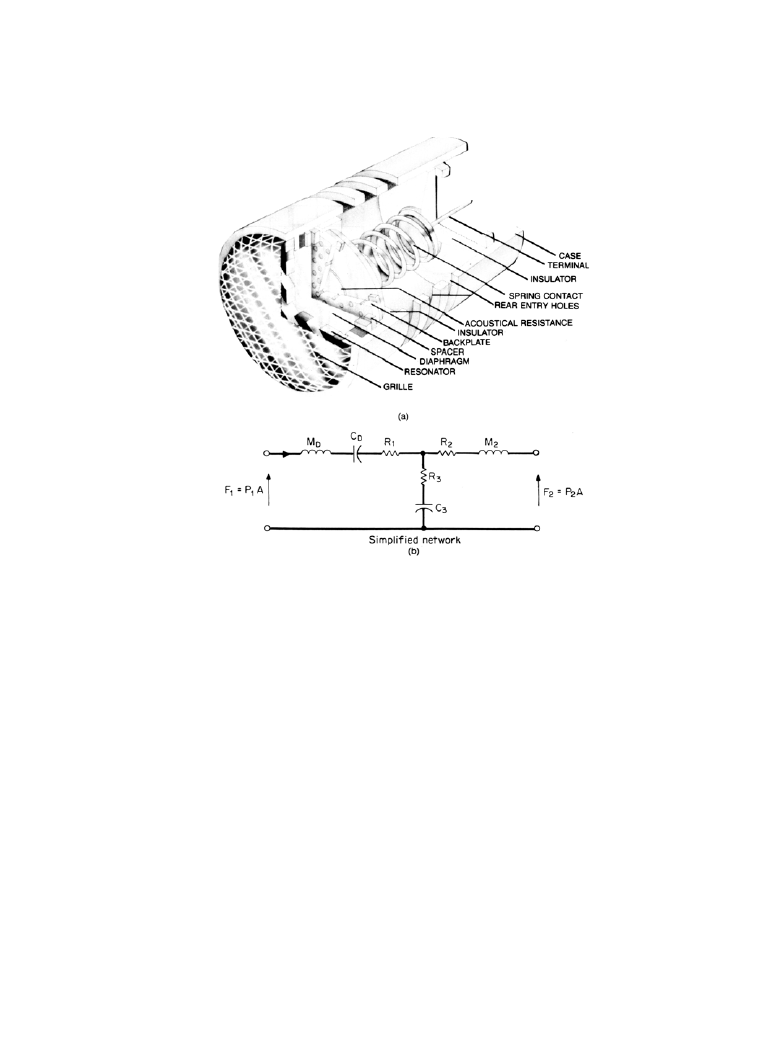
The operation of the microphone can be determined from a consideration of the simplified
mechanical network. (See Figure 4.1.18.) M
D
and C
D
are the mass and compliance of the dia-
phragm; R
1
is the resistance of the air film between diaphragm and backplate; R
3
is the resistance
of the screen which connects to the case volume C
3
; and R
2
and M
2
represent the holes and
screens at the rear sound entry.
The velocity of the diaphragm is given by
x·
Figure 4.1.18
Unidirectional condenser microphone: (
a) mechanical layout, (b) simplified mechan-
ical network. (
From [4]. Used with permission.)
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)
Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
Microphones

Microphones 4-27
(4.1.9)
Where:
Z
M
= mechanical impedance of vibrating system, mechanical ohms
F
D
= force on diaphragm, N
K = transducer
P = sound pressure, N/m
2
A = area of diaphragm, m
2
ω= 2πf
f = frequency, Hz
and the displacement is given by
(4.1.10)
The output voltage is given by Equation (4.1.2).
Thus, for the displacement (and output voltage) to be uniform with frequency, Z
M
must be
resistive. The resistance elements R
1
, R
2
, and R
3
are the controlling elements.
The phase-shift network R
2
, M
2
, R
3
, and C
3
may take on a variety of configurations similar to
the various networks in ribbon and dynamic microphones.
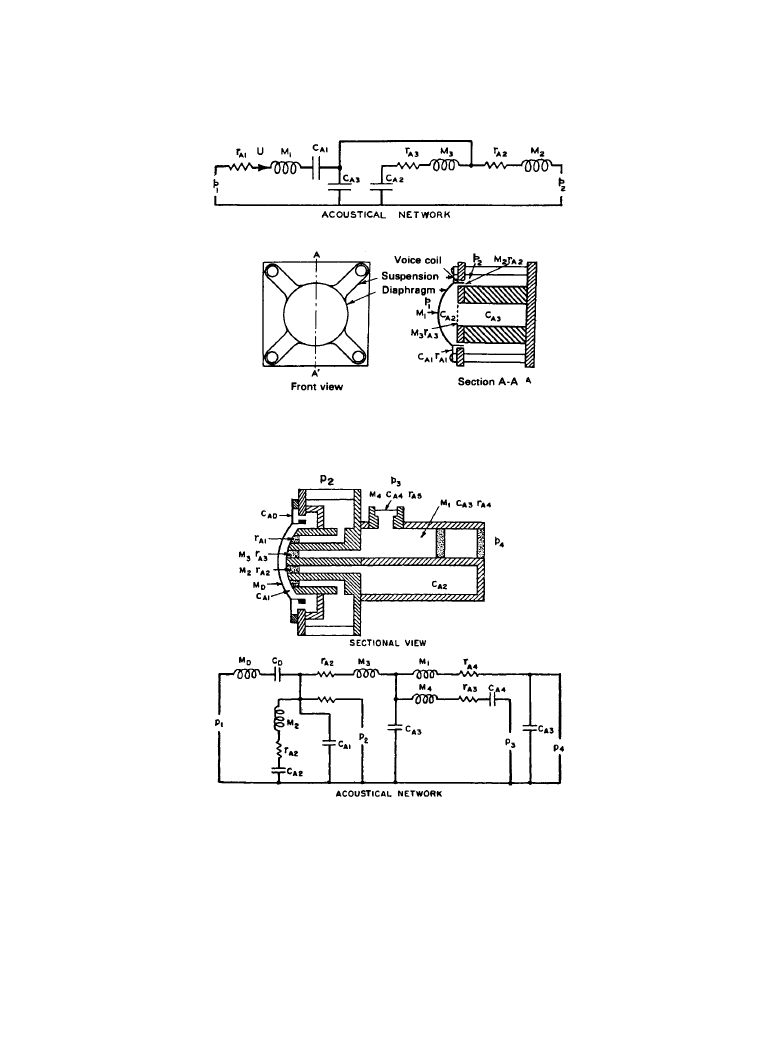
Moving-Coil Unidirectional Microphone
Figure 4.1.19 shows the basic mechanical cross section and acoustical network of the moving-
coil unidirectional microphone. The resonance of M
1
and C
A1
, the diaphragm-and-coil-assembly
inertance and acoustical capacitance, is at the low end of the usable audio-frequency range.
Depending on the application of the microphone, this may be anywhere from approximately 70
to 140 Hz. The lowest attainable resonance is limited by the stiffness of the plastic-film dia-
phragm material.
The moving-coil system is mass-controlled above resonance as in the ribbon transducer.
Therefore, the difference in sound pressure between the two sides of the diaphragm must be pro-
portional to frequency so as to maintain a constant volume current and a constant diaphragm and
coil velocity throughout the useful audio-frequency range. This is done by selection of the
parameter values of the phase-shift network. Also, the network values must provide for the cor-
rect delay time versus frequency such that a null is maintained at 180° for a cardioid pattern.
Alternately, the network values may be adjusted for a hypercardioid pattern.
Variable-Distance Unidirectional Microphone
Figure 4.1.20 shows a sectional view and the acoustical network of the variable-distance unidi-
rectional microphone. The distance from front to rear sound entry varies approximately inversely
with frequency [2]. Sound pressure P
1
acts on the front of the diaphragm. Pressures P
2
, P
3
, and
P
4
act on the back of the diaphragm through suitable acoustic impedance. P
2
acts in the high-fre-
quency region, P
3
at middle frequencies, and P
4
at low frequencies. The advantage of this design
x·
F
D
Z
M
-------
j
ωKPA
Z
M
-----------------
=
=
x
x·
j
ω
----
KPA
Z
M
------------
=
=
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)
Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
Microphones
4-28 Microphone Devices and Systems
is that accentuation of low frequencies due to the proximity effect is reduced. As with the mov-
ing-coil unidirectional microphone, the moving-system resonance is in the region of 100 Hz and
is mass-controlled at higher frequencies.
Figure 4.1.19
The basic acoustical network and mechanical construction of the moving-coil unidi-
rectional microphone. (
From [2]. Used with permission.)
Figure 4.1.20
Sectional view and acoustical network of the variable-distance unidirectional micro-
phone. (
From [2]. Used with permission.)
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)
Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
Microphones
Microphones 4-29
4.1.4
Ultra-Directional Microphones
For the purpose of this discussion, an ultradirectional microphone is defined as one that has an
energy response to random sound of less than 0.25, relative to an omnidirectional microphone,
over a major portion of its useful audio-frequency range. The value of 0.25 is the random energy
efficiency of a hypercardioid, which represents the highest directivity obtainable with a first-
order gradient microphone [13]. This category includes higher-order pressure-gradient micro-
phones and wave-interference types of microphones. The applications of ultradirectional micro-
phones include long-distance pickup of sound in the presence of random noise and/or
reverberant sound or close talking in high-noise environments.
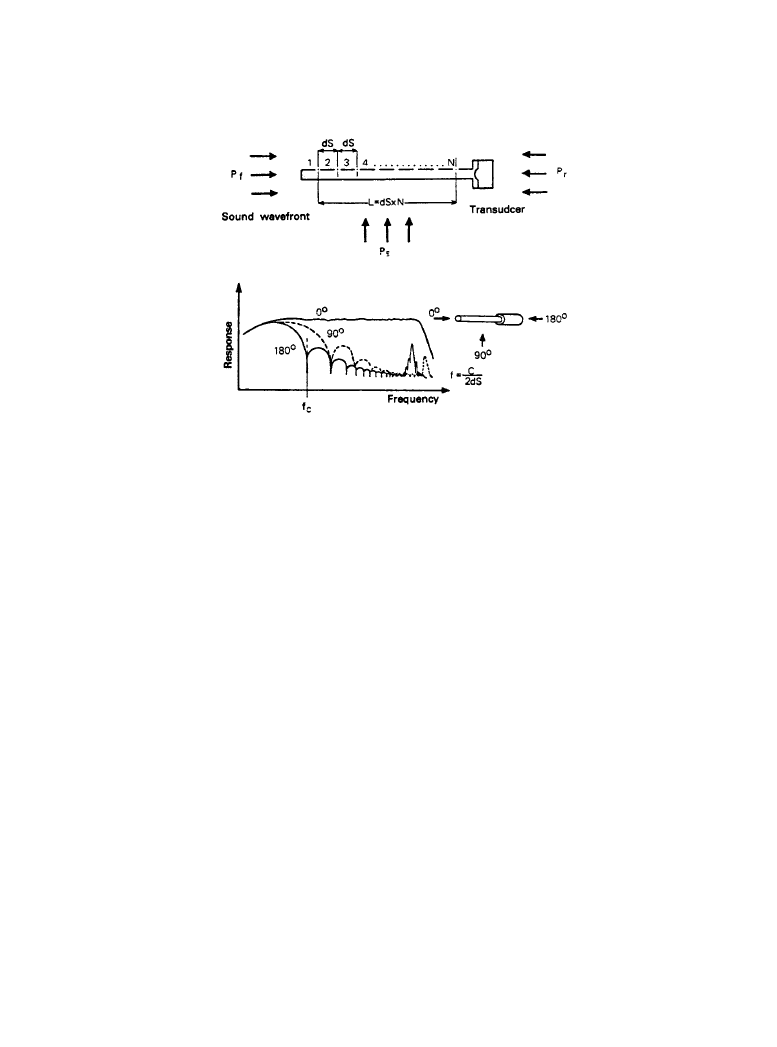
Of the many types of ultradirectional microphones developed, only the line-type microphone
remains in common use. It employs high-sensitivity condenser or moving-coil electrodynamic
transducers.
4.1.4a
Line Microphone
A simple line microphone is shown in Figure 4.1.21. An acoustic line (pipe) with equally spaced
sound openings along its entire length is connected to a pressure microphone element. The trans-
ducer element may be of the electrostatic or electrodynamic varieties. A high order of directivity
is indicated by the frequency-response curves in the mid- and high-frequency region where the
90° and 180° responses are far below the 0° curve. The low-frequency limit of the useful range
of ultradirectional characteristics is given by [14]
(4.1.11)
f
c
C
2L
------
=
Figure 4.1.21
Operating principles of the line microphone. (
Courtesy of Sony.)
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)
Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
Microphones