ВУЗ: Казахская Национальная Академия Искусств им. Т. Жургенова
Категория: Книга
Дисциплина: Не указана
Добавлен: 03.02.2019
Просмотров: 21673
Скачиваний: 19
5-32 Sound Reproduction Devices and Systems
5.3.2b
Efficiency
Speaker efficiency is expressed in terms of the ratio of electrical input to acoustic output. The
electrical input with due regard to only the real-number part in the equivalent circuit in Figure
5.3.2 is expressed by
(5.3.3)
Where:
W
e
= electrical input, W
W
e
R
c
I
2
=
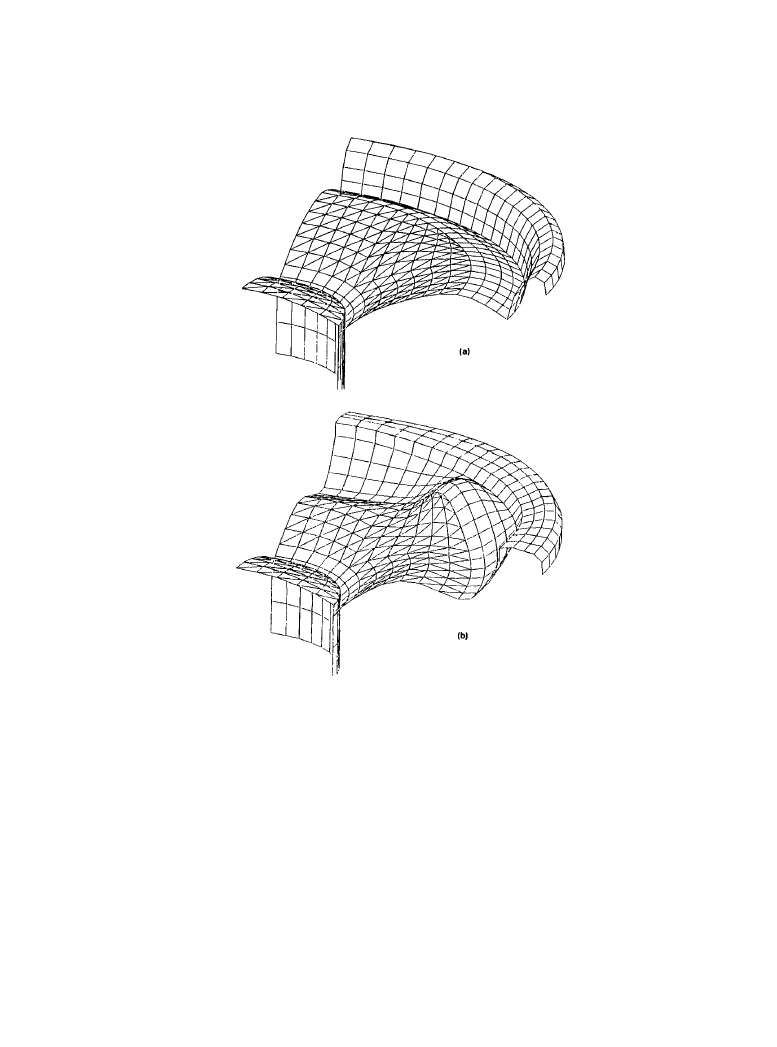
Figure 5.3.7
Breakup vibrating modes, estimated by FEM: (
a) fundamental mode of the suspen-
sion, (
b) axial mode of the cone.
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)
Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
Dynamic-Type Direct-Radiation Speakers

Dynamic-Type Direct-Radiation Speakers 5-33
R
c
= coil resistance,
Ω
I = current flowing into the coil, A
Acoustic output W
a
is determined by
(5.3.4)
Where:
W
a
= acoustic output, W
r
R
= acoustic radiation resistance, N/m
F = driving force, N
Z
m
= vibration-system mechanical impedance, mechanical ohms
Consequently, efficiency
η is found as follows
(5.3.5)
With the diaphragm considered as a stiff disk, if it is an infinite baffle board, W
a
can
employ the approach shown previously in this section. If the acoustic output is constant,
η is
determined by
(5.3.6)
Where:
η = conversion efficiency, percent
p = air density, kg/m
3
c = sound velocity, m/s
m = vibration-system mass, kg
a = effective radius of diaphragm, m
B = flux density, We/m
2
l = coil length, m
R
c
= coil resistance,
Ω
In Equation (5.3.6), the magnitude on the second term normally is approximately 50. The
efficiency is only a few percentage points, which is very low.
W
a
r
R
F
Z
m
-------
=
η
W
a
W
e
W
a
+
---------------------
=
1
1
W
e
/W
a
+
--------------------------
=
η
1
1
2cm
2
R
c
πpa
4
B
2
l
2
-----------------------
+
---------------------------------
100
×
=
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)
Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
Dynamic-Type Direct-Radiation Speakers
5-34 Sound Reproduction Devices and Systems
5.3.2c
Nonlinear Distortion
The strain that takes place in a dynamic speaker includes several types of distortion: 1) driving-
force distortion, 2) support system distortion, 3) air distortion, and 4) frequency-modulation dis-
tortion.
Driving-Force Distortion
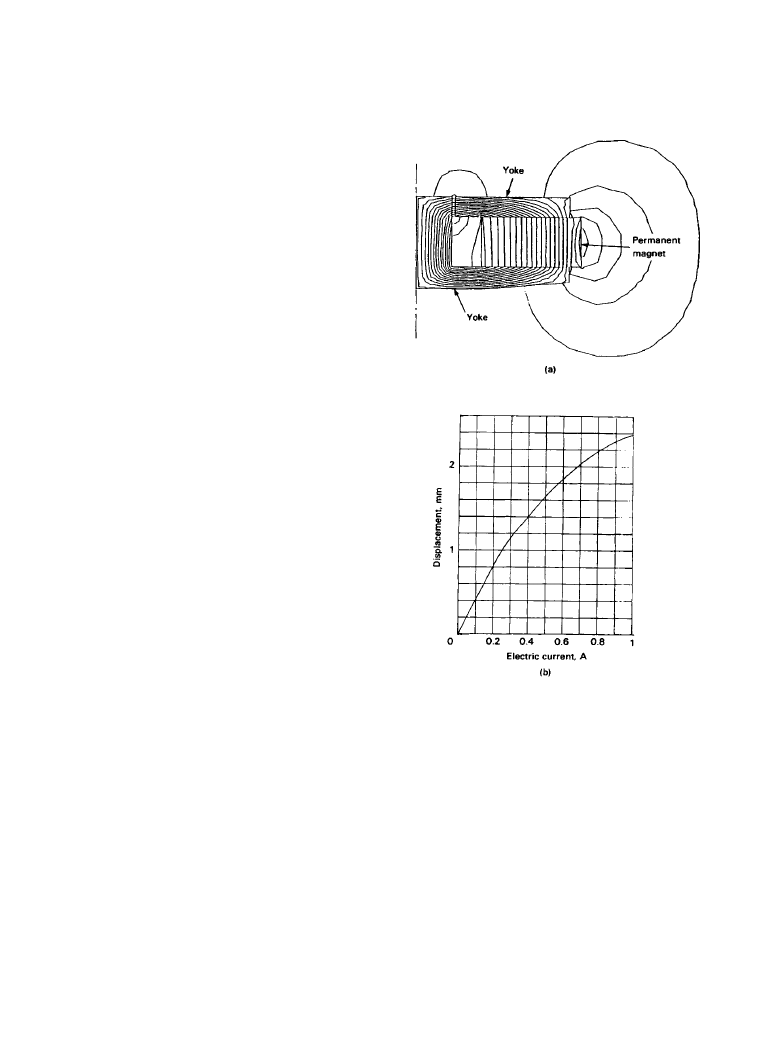
Driving-force distortion occurs mainly because a drive coil flows out from the uniform magnetic
field as the amplitude varies, whereby the driving force ceases to be proportional to current. Fig-
ure 5.3.8a shows the magnetic-flux distribution and magnetic-flux-density distribution near the
magnetic pole in a typical magnetic circuit. Figure 5.3.8b shows the relationship between the
power coefficient generated by a coil located in such a magnetic circuit and the coil displace-
ment. Consequently, the following nonlinear differential equation must be solved. Here, a study
Figure 5.3.8
Flux distribution of the half-
magnetic circuit: (
a) typical flux lines in an
air gap estimated by FEM, (
b) relation
between the electric current and the dis-
placement.
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)
Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
Dynamic-Type Direct-Radiation Speakers
Dynamic-Type Direct-Radiation Speakers 5-35
may be made at an ultralow frequency with a large amplitude. Therefore, radiation impedance
can be approximated with radiation mass and vibration-system impedance with stiffness. The
basic equations are as follows, assuming the stiffness to be linear:
(5.3.7)
(5.3.8)
Where:
A(
ζ) = ζ function force factor, N/A
M
MA
= radiation mass, kg
s
n
= vibration-system stiffness, N/m
= applied voltage, V
R = coil resistance,
Ω
I(
ζ) = current of ζ function, A
ζ = displacement, m
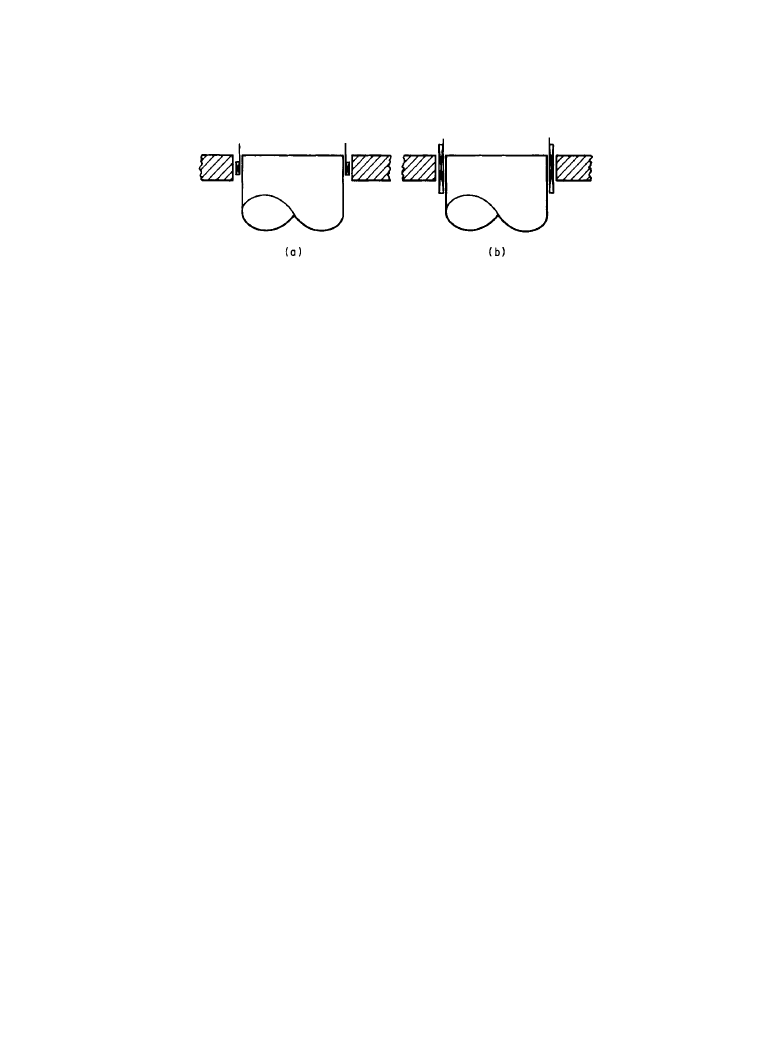
To reduce this distortion, it is preferable to adopt a method of decreasing the coil-winding
width as shown in Figure 5.3.9a so that it is not off the magnetic field or sufficiently increasing
the coil-winding width as shown in Figure 5.3.9b. Because driving-force distortion develops as
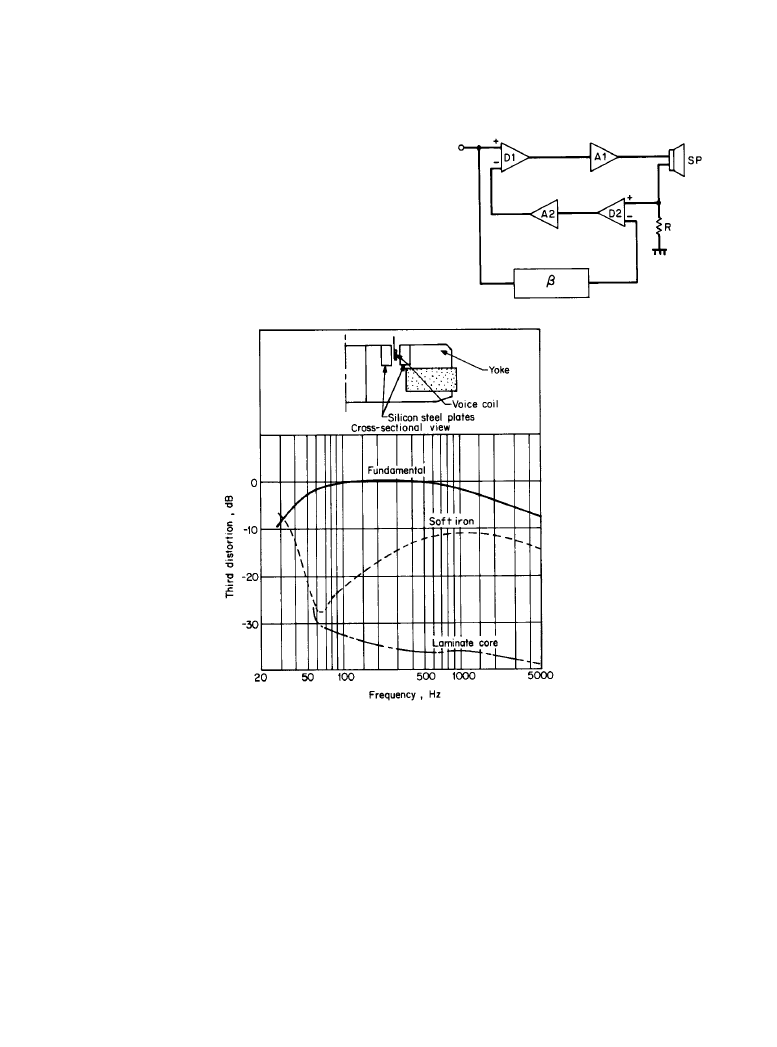
current distortion, this distortion can be reduced by detecting current flowing into a coil with a
microresistance and feeding this current back into the input terminal of the amplifier. This is
shown in Figure 5.3.10. Other driving-force distortions include a strain generated by hysteresis
of the magnetic-circuit yoke. This can be substantially improved by using a silicon steel plate for
a yoke and a magnetic material of small conductivity. This technique is shown in Figure 5.3.11.
Support-System Distortion
Support-system distortion is such that since elasticity of suspension is nonlinear, force and dis-
placement cease to be proportional to each other. The force-versus-displacement characteristics
M
MA
d
2
ξ
dt
2
----------
m
d
2
ξ
dt
2
----------
r
d
ξ
dt
-------
s
n
A
ξ
( )I ξ
( )
–
+
+
=
E
0
sin
ωt
RI
ξ
( ) A ξ
( )
d
ξ
dt
-------
+
=
E
0
ωt
sin
Figure 5.3.9
Relation between the voice coil and the magnetic circuit for reducing distortion: (
a)
voice coil shorter than the air gap, (
b) voice coil longer than the air gap.
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)
Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
Dynamic-Type Direct-Radiation Speakers
5-36 Sound Reproduction Devices and Systems
of a general support system are shown in Figure 5.3.12. The function showing such a curve is
expressed by the following equation.
(5.3.9)
Where:
F(
ζ) =force at displacement V, N
F
ξ
( )
αξ βξ
2
ϒξ
3
+
+
=
Figure 5.3.10
System for reducing current distor-
tion.
D1, D2 = differential amplifiers; A1, A2 =
amplifiers;
β
= feedback circuit;
SP = loud-
speaker;
R = resistor for detecting current distor-
tion.
Figure 5.3.11
Comparison of the third-harmonic distortion between soft iron and silicon plates
(solid line = fundamental current level, dashed line = soft-iron-type yoke, dash-dot line = laminate-
core-type yoke).
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)
Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
Dynamic-Type Direct-Radiation Speakers