ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 21.12.2021
Просмотров: 2962
Скачиваний: 33

103
работающих в одинаковом режиме. Параметры состояния ниток,
замеренные в их конструктивно идентичных точках, близки по
значению.
Здесь, как и в приведенных выше двух других случаях
(дублирование замеров особо важных технологических параметров
и проверка показаний датчиков методом косвенного измерения, с
использованием
математических
моделей
отдельных
технологических узлов), имеется избыточная информация. Ее
требуется использовать для оценки надежности источника
контролируемой величины и выбора наиболее достоверного
значения или для присвоения контролируемой переменной
заданного заменяющего значения, если все три анализируемых
значения будут признаны недостоверными.
Эта задача обычно решается с помощью следующего алгоритма
контроля достоверности информации:
- по кворумной схеме два из трех, позволяющего выбрать
наиболее достоверное значение из трех значений одной и той же
величины, полученных из разных источников;
- из трех близких по технологическому смыслу и численному
значению величин;
- для присвоения контролируемой величине заданного
заменяющего значения, если все три анализируемые величины будут
признаны недостоверными. Суть алгоритма заключается в
следующем.
Проверяется выполнение неравенств:
1
2
1
]
[
a
x
x
≤
−
(9.5.45)
2
3
1
]
[
a
x
x
≤
−
(9.5.46)
3
3
2
]
[
a
x
x
≤
−
(9.5.47)
где
1
x
- исходное значение контролируемой величины,
−
3
2
,
x
x
избыточное
значение
контролируемой
величины,
−
3
2
1
,
,
a
a
a
константы.
Выходной величине присваивается значение в соответствии с
табл. 8.1.
№№
пп
Выполнение неравенств
Выходная
величина
1.
2.
3.
4.
5.
6.
(9.5.45), (9.5.46), (9.5.47)
(9.5.45), (9.5.46)
(9.5.45), (9.5.47)
(9.5.46), (9.5.47)
(9.5.45)
(9.5.45)
y = x
1
y = x
1
y = x
2
y = x
3
y = x
1
y = x
1

104
7.
8.
(9.5.45)
_
y = z
y = z
В случае 5 и 6 дополнительно выдается сообщение о
ненадежности источника значения
x
1
.
В случаях 7 и 8 дополнительно выдается сообщение о ненадежности
источников значений
x
2
и
x
3
соответственно. В качестве
заменяющего значения
z
используется константа или любая другая
переменная, например, одна из величин
x
1
x
2,
x
3.
Константы
3
2
1
,
,
a
a
a
выбираются исходя из условий конкретного
случая использвания алгоритма с учетом:
•
проектной
точности
источников
контролируемых
и
избыточных значений;
•
вероятности ложного обнаружения недостоверности;
•
вероятности нефиксации недостоверности;
•
смешение влияния погрешности контролируемого значения на
точность последующих расчетов;
•
затрат,
необходимых
для
поддержания
точности
контролируемого значения в пределах, определяемых
выбранными значениями констант
3
2
1
,
,
a
a
a
.
При
завышенных
значениях
констант
увеличивается
допустимая
погрешность
контролируемой
величины,
что
отрицательно сказывается на последующих их расчетах. При
заниженных значениях констант возрастает число замен, поэтому
необходима уверенность в том, что заменяющие значения
достаточно доброкачественны. Блок - схема алгоритма приведена на
рис. 9.2
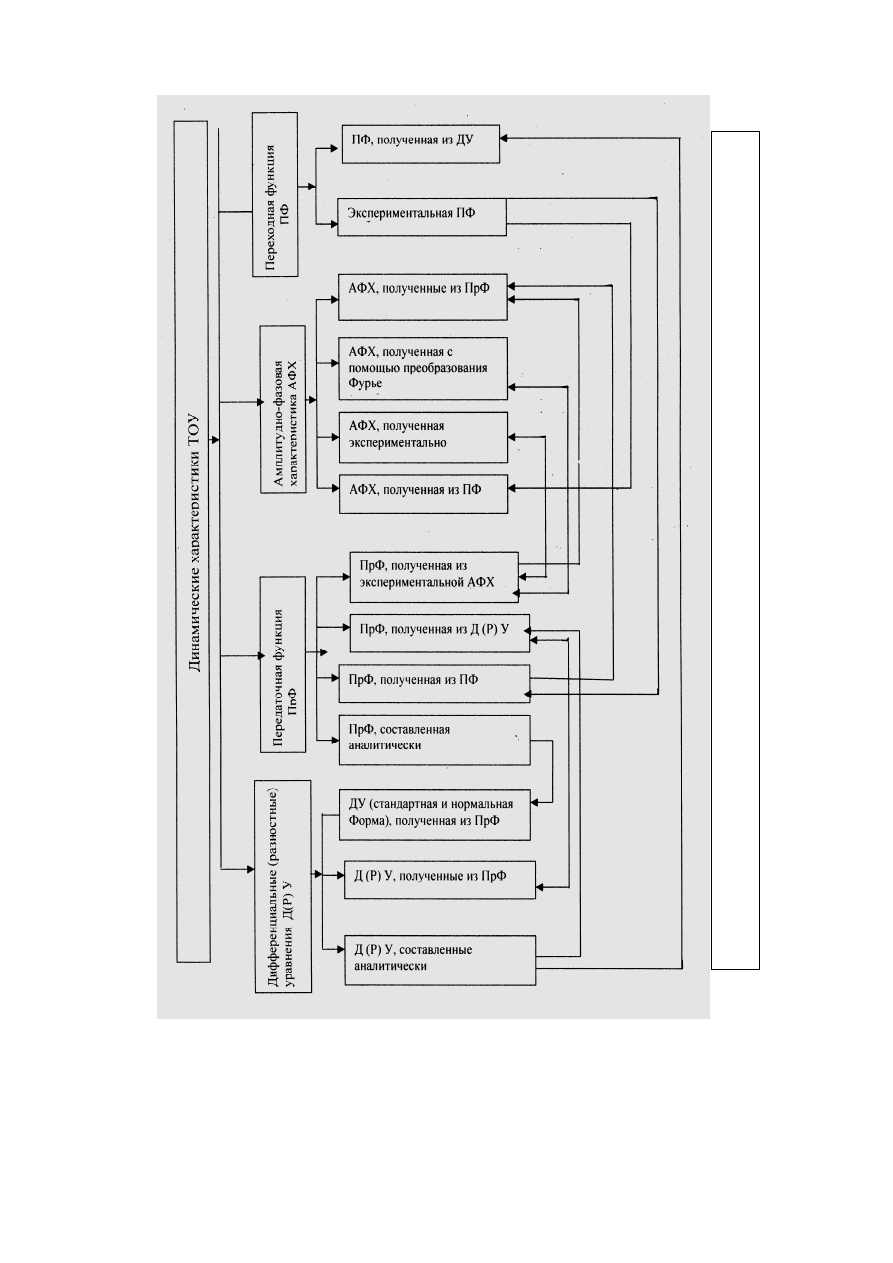
9.6 Задачи характеризации
Целью характеризации, т.е. математического описания объекта
управления является установление форм связи между параметрами
процесса. Уравнения связи, в которых отражаются физические
законы, определяющие протекание процесса в данном объекте
управления, могут быть записаны в различных формах. Форма
характеризации процесса должна быть адекватной в смысле
требований, предъявляемых к ней. Такими требованиями могут
быть:
•
наглядность или простота физического смысла связей между
переменными (при теоретическом анализе);
•
простота нахождения параметров связей (при идентификации);

105
нет
нет
да
да
нет
да
Рис. 9.2 Блок-схема алгоритма контроля достоверности информации
•
простота синтеза оптимального управления;
•
простота анализа ТОУ при решении конкретных задач анализа
качества систем управления, устойчивости и др.
Поскольку всем требованиям одновременно удовлетворять
трудно, то на разных этапах синтеза программного обеспечения ТП
можно использовать различные формы характеризации, которые
связаны между собой и при необходимости могут переходить от
одних форм к другим, более удобным на данном этапе для решения
поставленных задач, используя алгоритмы перехода. Структурная
схема связей между различными формами характеризации
изображена на (рис.9.3.).
Так как реальные процессы являются многомерными,
нестационарными, с голономными связями, с распределенными
]
[
2
1
12
x
x
−
=
∆
]
[
]
3
1
13
x
x
−
=
∆
]
[
3
2
23
x
x
−
=
∆
1
12
a
≤
∆
z
y
=
2
13
a
≤
∆
3
23
a
≤
∆
3
x
y
=
1
x
y
=
2
13
a
≤
∆
1
x
y
=
2
x
y
=
2
x
y
=
1
x
y
=

106
параметрами, то необходимо применять приемы упрощения
математических моделей, к которым относятся:
•
расчленение многомерной системы на ряд систем меньшей
размерности;
•
понижение размерности модели за счет оставления в ней
наиболее существенных воздействий и учета прочих в
параметрической форме;
•
принятие гипотезы стационарности или кваистационарности
модели;
•
линеаризация нелинейных связей в модели управления в
некоторой области изменения переменных;
•
пренебрежение
динамическими
свойствами
объекта
управления.
Перечисленные допущения позволяют описывать динамические
свойства объекта обыкновенными линейными дифференциальными
уравнениями с постоянными коэффициентами.
Использование ЦВМ для управления процессом приводит к
тому, что на вход объекта подается управляющий сигнал,
квантованный по времени. Выходной сигнал также рассматривается
только в дискретные моменты времени. В этом случае для
характеризации процесса можно применять соответствующую ему
дискретную модель в виде линейных разностных уравнений с
постоянными коэффициентами и др.
На практике применяют два способа характеризации объектов
управления:
•
с помощью характеристик ˝вход выход˝;
•
с помощью уравнений для переменных состояния.
Описание объекта первым способом является субъективным и
неполным. Оно отражает динамические свойства только
агрегированных моделей каналов прохождения управляющих и
возмущающих воздействий. Другой подход связан с описанием
поведения объекта управления в абстрактном пространстве
состояний. Этот путь оказывается более плодотворным, так как
описание в терминах пространства состояний более объективно и
полно, чем описание характеристиками ˝вход выход˝, которые
определяют лишь одну часть объекта, а именно, полностью
управляемую и наблюдаемую часть.
107
Р
ис
.9
.3
С
вя
зь
м
еж
ду
р
аз
ли
чн
ы
м
и
ф
ор
м
ам
и
ха
ра
кт
ер
из
ац
ии