Файл: Курсовой проект по дисциплине Автоматизированный электропривод.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 22.11.2023
Просмотров: 123
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Федеральное государственное автономное образовательное учреждение
высшего профессионального образования
Российский государственный профессионально педагогический университет
Институт электроэнергетики и информатики
Кафедра электрооборудования и автоматизации промышленных предприятий
Курсовой проект по дисциплине «Автоматизированный электропривод»
На тему: Модернизация электропривода грузового лифта грузоподъемностью 2 тонны
Выполнил: студент гр. ЗЭМ-501
Проверил: А.А. Емельянов
Екатеринбург 2014
Содержание
Стр.
Реферат 5
Введение 6
2. Задание и исходные данные к проекту 8
3. Выбор типа электропривода 11
4. Выбор и проверка электродвигателя 13
4.1. Расчет мощности двигателя 13
4.2. Предварительный выбор двигателя и расчет его параметров 16
4.3. Расчет передаточного числа редуктора 19
4.4. Расчет и построение нагрузочной диаграммы двигателя 20
4.5. Проверка двигателя по нагреву 26
5 Выбор основных узлов силовой части электропривода 28
5.1Выбор тиристорного преобразователя 28
5.2 Выбор силового трансформатора 29
5.3 Выбор сглаживающего реактора 30
5.4. Разработка принципиальной схемы силовой части
электропривода 31
5.5. Расчет параметров силовой части электропривода в относительных
единицах 35
5.5 Расчет коэффициентов передачи датчиков 36
6. Разработка системы управления электроприводом 38
6.1. Выбор типа системы управления электроприводом 38
6.2 Расчет регулирующей части контура тока якоря 39
6.2.1 Расчет параметров математической модели контура тока 39
6.2.2 Конструктивный расчет регулятора тока 45
6.3 Расчет регулирующей части контура скорости 48
6.3.1. Расчет параметров математической модели контура
скорости 48
6.3.2. Конструктивный расчет регулирующей части контура
скорости 49
6.4 Расчет задатчика интенсивности 51
6.4.1. Расчет параметров математической модели задатчика
интенсивности 51
6.4.2 Конструктивный расчет задатчика интенсивности 52
7. Основы теории систем подчиненного регулирования 55
7.1 Обобщенная схема многоконтурной системы подчиненного
регулирования 55
7.2. Синтез регуляторов 57
7.2.1. Синтез регулятора первого контура и его свойства 57
8. Системы регулирования тока якоря 62
8.1. Функциональная схема САР тока якоря 62
8.2. Синтез регуляторов тока якоря 63
8.3. Анализ свойств САР тока якоря 64
9. Моделирование в MatLab 68
Заключение 79
Список использованной литературы 81
РЕФЕРАТ
Курсовой проект содержит 81 лист печатного текста, 34 иллюстраций, 4 таблицы, 11 использованных источников.
Произведен расчет силовой части системы :
«Тиристорный преобразователь – ДПТ НВ», включающий в себя: предварительный выбор двигателя;
-
расчет и построение нагрузочной диаграммы и проверка двигателя на нагрев; -
выбор тиристорного преобразователя; -
моделирование электропривода в MATLAB.
ВВЕДЕНИЕ
Несмотря на значительное многообразие типов и конструкций современных грузовых лифтов, все они состоят из основных элементов, имеющих принципиально одинаковое назначение.
На рис.1 представлена схема грузового лифта грузоподъемностью 2000 кг с электроприводом, предназначенного для обслуживания зданий до 4 этажей с общей высотой здания 20 метров.
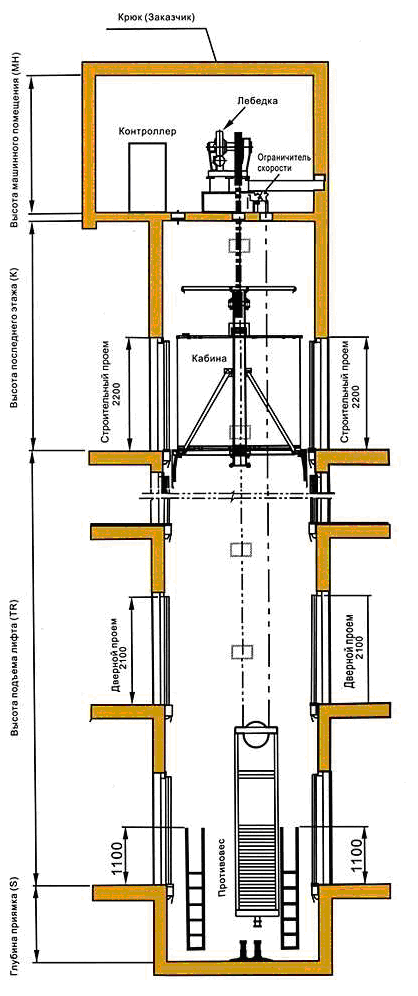
Рис.1
Главной приводной частью лифта является подъемный механизм (лебедка), который с помощью канатов и подвески перемещает
кабину на различные этажи обслуживаемого здания, останавливаясь
на нужном из них так, чтобы пол кабины был по возможности на уровне пола соответствующей этажной площадки. Для уравновешивания кабины и части полезного груза предусмотрен противовес. Кабина и другие подвижные части лифта перемещаются в специально оборудованном сооружении, называемом шахтой, которую со стороны этажных площадок оборудуют дверьми. Внутри шахты (практически по всей её высоте) крепят направляющие кабины и направляющие противовеса, а в верхних и нижних частях каркасов кабины и противовеса устанавливают башмаки. охватывая с трех сторон рабочую часть направляющих, башмаки четко фиксируют кабину и противовес в вертикальном положении.
В аварийных ситуациях, когда кабина развивает скорость выше дозволенной (предельной), что контролируется ограничителями скорости, срабатывают ловители, установленные внизу или вверху кабины (иногда и на противовесе). Захватывая направляющие, они прочно удерживают кабину на этих направляющих.
В случае неисправности системы управления кабина или противовес могут пройти ниже рабочего положения. Чтобы предотвратить жесткий удар
о пол шахты, в её нижней части предусмотрены упоры или буфера и, смягчающие удар при посадке.
Нижнюю часть шахты, где расположены буфера и натяжные устройства, называют приямком .
В машинном помещении расположены подъемный механизм, ограничитель скорости и станция управления. В некоторых лифтах под машинным помещением над шахтой предусмотрено блочное помещение, в котором устанавливают контрблоки (контршкивы).
2. Задание и исходные данные
Грузовой лифт установлен в четырехэтажном производственном здании и служит для опускания готовой продукции в контейнерах, закатываемых в кабину, а также для транспортировки полуфабрикатов в контейнерах между этажами и подачи порожних контейнеров. Полуфабрикаты изделий не допускают чрезмерных динамических нагрузок при транспортировании, из-за чего должно быть ограничено максимальное ускорение кабины. Работу лифта и его конструктивное исполнение поясняет кинематическая схема (рис.2).Кабина лифта уравновешивается противовесом через канат на канатоведущем шкиве трения, который приводится в движение через редуктор от одного или двух двигателей. Электропривод лифта работает в повторно-кратковременном режиме с переменной нагрузкой.
Работа лифта осуществляется по следующему циклу:
-
опускание кабины с четвертого этажа на первый этаж; -
стоянка на первом этаже (двигатель отключен); -
подъем кабины с первого этажа на второй этаж; -
стоянка на втором этаже (двигатель отключен); -
подъем кабины со второго этажа на третий этаж; -
стоянка на третьем этаже (двигатель отключен); -
подъем кабины с третьего этажа на четвертый этаж; -
стоянка на четвертом этаже (двигатель отключен).
После каждой стоянки масса груза в кабине изменяется (табл.2.1).
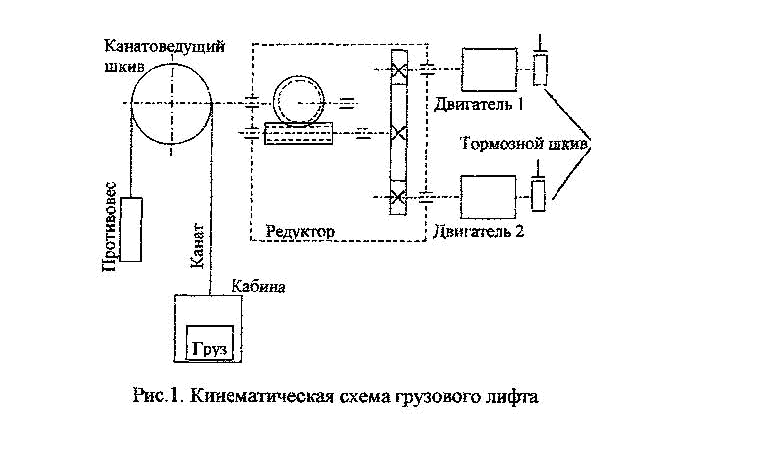
Рис.2. Кинематическая схема грузового лифта
Таблица 2.1
Исходные данные по грузовому лифту
| Параметр | Обозначение | |
| | 4 | |
| Масса кабины, т | mк | 0,5 |
| Номинальная грузоподъемность лифта, т | mгп | 2 |
| Скорость движения кабины, м/с | V | 0,7 |
| Радиус канатоведущего шкива, м | rш | 0,25 |
| Момент инерции канатоведущего шкива, кг·м2 | Jш | 4,5 |
| Максимально допустимое ускорение кабины, м/с2 | адоп | 2,1 |
| Продолжительнось включения, % | ПВ | 45 |
| Масса груза при движении с четвертого этажа на первый (4→1), т | m41 | 3 |
| Масса груза (1→2), т | m12 | 0,4 |
| Масса груза (2→3), т | m23 | 1,4 |
| Масса груза (3→4), т | m34 | 1 |
| Полная высота подъема, м | L | 20 |
| Число этажей | N | 4 |
| Коэффициент трения лифта о направляющие | µ | 0,05 |
| КПД механических передач | ηп | 0,6 |
3.Выбор типа электропривода
При выборе типа электропривода, прежде всего, учитывается условие работы производственного механизма. Высокая производительность и качество выпускаемой продукции могут быть обеспечены лишь при правильном учёте статических и динамических характеристик привода и рабочей машины. Кинематика, и даже конструкция рабочей машины в значительной степени определяются типом применяемого ЭП, и, наоборот, в зависимости от конструктивных особенностей исполнительного механизма привод претерпевает значительные изменения.
При выборе типа ЭП должны быть учтены: характер статического момента, необходимые пределы регулирования скорости, плавности регулирования, требуемых механических характеристик, условий пуска и торможения, числа включений в час, качества окружающей среды и т.п.
Первоначально решается вопрос о выборе регулируемого или нерегулируемого типа ЭП. В последнем случае задача значительно упрощается. Все сводится к выбору двигателя переменного тока (асинхронные двигатели). В случае с регулированием по скорости решается вопрос о выборе рода тока привода.
Применение привода постоянного тока может быть оправдано лишь в тех случаях, когда привод должен обеспечивать повышенные требования к плавности регулирования скорости. Приводы постоянного тока используются в механизмах, работающих в повторно-кратковременном режиме: краны, подъёмные механизмы, вспомогательные механизмы металлургической промышленности (шлепперы, рольганги, сталкиватели, нажимные устройства).
В случае приводов повторно-кратковременного режима тип двигателя определяется из условий получения минимальной деятельности переходного процесса, минимальных динамических моментов. С этой целью либо используют специальные двигатели с минимальным моментом инерции, либо переходят к двухдвигательному приводу (суммарный момент инерции двух двигателей той же мощности, что и однодвигательный привод меньше на 20 – 40%).
По защите от воздействия окружающей среды различают открытые, защищенные, закрытые и герметичные двигатели. Закрытые двигатели (IP44) предохраняют от попадания во внутрь брызг воды любого направления. Пыль влага и газы имеют доступ в такие двигатели. При выборе двигателей необходимо учитывать то, что при одной и той же мощности и скорости наибольшие массы, габариты и стоимость имеют закрытые двигатели.
Для грузового лифта возможно использование следующих ЭП:
-
«ТПЧ-АД» (тиристорный преобразователь частоты – асинхронный двигатель); -
«Г – Д» (генератор – двигатель); -
«ТП – Д» (тиристорный преобразователь – двигатель).
Система «ТПЧ-АД» в принципе, позволяет получить характеристики, аналогичные «ТП – Д», но стоимость частотного преобразователя гораздо выше управляемого выпрямителя.
К недостаткам системы «Г – Д» относят:
-
необходимость в двукратном преобразовании энергии, что приводит к значительному снижению КПД; -
наличие двух машин в преобразовательном агрегате; -
значительные габариты установки; -
высокие эксплуатационные расходы.
Для ЭП грузового лифта принимаем систему «ТП4 – Д»
4. Выбор и проверка электродвигателя
4.1. Расчет мощности двигателя
Для выбора двигателя необходимо рассчитать его требуемую номинальную мощность, исходя из нагрузочной диаграммы механизма (т.е. временной диаграммы моментов или сил статического сопротивления механизма на его рабочем органе). По рассчитанной мощности затем выполняется предварительный выбор двигателя.
Определим массу противовеса и построим нагрузочную диаграмму лифта (график статических моментов на канатоведущем шкиве). Расчет времени участков цикла на этапе предварительного выбора двигателя выполняем приблизительно, т.к. пока нельзя определить время разгона и замедления (суммарный момент инерции привода до выбора двигателя неизвестен).
Масса противовеса выбирается таким образом, чтобы противовес уравновешивал кабину и половину массы номинального груза:
mпр = 0,5mгп + mк;
mпр=0.5·2000+500=1500 кг.
Активные составляющие момента статического сопротивления на канатоведущем шкиве определяются силами тяжести кабины с грузом и противовеса:




Реактивные составляющие момента статического сопротивления на канатоведущем шкиве определяются силами трения кабины и противовеса о направляющие:
Моменты статического сопротивления на канатоведущем шкиве представляют собой сумму активной и реактивной составляющей:
Угловая скорость канатоведущего шкива:
Расстояние между этажами:
Время движения при перемещении на три этажа (приблизительно):
Время движения при перемещении на один этаж (приблизительно):
Время работы в цикле (приблизительно):
tp=3t1э+t3э =3·16,7 +50 = 100,1 с.
Время стоянки на этаже (приблизительно):
Возможный вид нагрузочной диаграммы лифта представлен на рис.3.
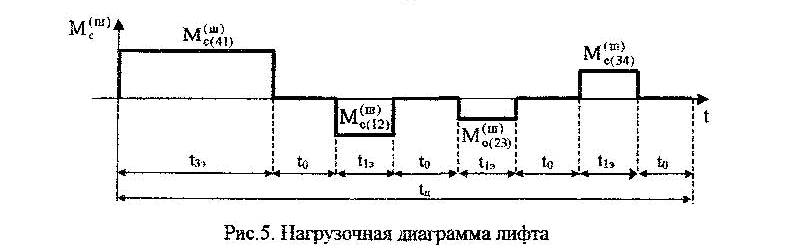
Рис. 3. Нагрузочная диаграмма двигателя
Эквивалентный статический момент на канатоведущем шкиве за время работы в цикле (с учетом влияния потерь в редукторе) составит:

 Нм
НмУчет влияния потерь в редукторе выполняется подстановкой следующих значений в формулу (1):
• в тормозном режиме:

;
• в двигательном режиме:

;
Примечание. Двигательныйрежим имеет место, если знаки электромагнитного момента двигателя и его скорости одинаковы, тормозной режим - если различны. Скорость двигателя считается положительной при подъеме кабины, отрицательной - при опускании кабины. Положительное направление момента двигателя совпадает с положительным направлением его скорости.
При расчете требуемой номинальной мощности двигателя предполагаем, что будет выбран двигатель, номинальные данные которого определены для повторно-кратковременного режима работы и стандартного значения продолжительности включения ПBN=40%.

где Кз –коэффициент запаса (примем Кз=1.1)
4.2 Предварительный выбор двигателя
Выбираем двигатель серии Д(22)
Для грузового лифта выбираем двигатель с естественным охлаждением, номинальные данные которого определены для повторно-кратковременного режима работы с продолжительностью включения ПВN =40%.
Выбираем двигатель серии Д. Номинальные данные двигателя приведены в табл.4.1.
Таблица 4.1
Данные выбранного двигателя Д(22)
| Параметр | Обозначение | Значение |
| Номинальная мощность двигателя, кВт | РN | 4,8 |
| Номинальное напряжение якоря, В | U1N | 220 |
| Номинальный ток якоря, А | I1N | 26 |
| Номинальная частота вращения, об/мин | n1 | 1150 |
| Максимально допустимый момент,Нм | Mmax | 108 |
| Сопротивление обмотки якоря(T=20oC), Ом | Rя | 0,37 |
| Сопротивление обмотки дополнительных полюсов(T=20oC),, Ом | Rдп | 0,196 |
| Момент инерции двигателя, кг∙м2 | Jд | 0,15 |
| Число пар полюсов | Pn | 2 |
| Максимально допустимый коэффициент пульсации тока якоря | K1(доп) | 0,15 |
Для дальнейших расчетов потребуется ряд данных двигателя, которые не приведены в справочнике. Выполним расчет недостающих данных двигателя:
Номинальная мощность:
Момент инерции:
Номинальная частота вращения:
Максимальный доп. момент:
Максимальный коэффициент пульсации:
K1(доп)=0,15
Номинальный ток якоря:
Сопротивление обмоток якоря:
Сопротивление доп. полюсов:
Данные выбранного двигателя Д(2*22) Табл. 4.2
| Параметр | Обозначение | Значение |
| Номинальная мощность двигателя, кВт | РN | 9,6 |
| Номинальное напряжение якоря, В | U1N | 220 |
| Номинальный ток якоря, А | I1N | 52 |
| Номинальная частота вращения, об/мин | n1 | 1150 |
| Максимально допустимый момент,Нм | Mmax | 216 |
| Сопротивление обмотки якоря(T=20oC), Ом | Rя | 0,19 |
| Сопротивление обмотки дополнительных полюсов(T=20oC),, Ом | Rдп | 0,098 |
| Момент инерции двигателя, кг∙м2 | Jд | 0,3 |
| Число пар полюсов | Pn | 2 |
| Максимально допустимый коэффициент пульсации тока якоря | K1(доп) | 0,15 |
Для дальнейших расчетов потребуется ряд данных двигателя, которые не приведены в справочнике. Выполним расчет недостающих данных двигателя:
Номинальная угловая скорость:
где ΩN– номинальная угловая скорость, рад/с;
nN – номинальная частота вращения, об/мин.
Номинальный момент двигателя:
Сопротивления цепи якоря приведенного к рабочей температуре:
Где
Номинальный ЭДС якоря:
Конструктивная постоянная двигателя, умноженная на номинальный магнитный поток:
Момент холостого хода:
где МN – номинальный момент двигателя, Нм;
РN – номинальная мощность двигателя, Вт.
Индуктивность цепи якоря двигателя:
4.3. Расчет передаточного числа редуктора
Расчет передаточного числа редуктора ip выполняется так, чтобы максимальной скорости рабочего органа механизма соответствовала номинальная скорость двигателя.
4.4. Расчет и построение нагрузочной диаграммы двигателя
Для проверки предварительно выбранного двигателя по нагреву выполним построение упрощенной нагрузочной диаграммы двигателя (т.е. временной диаграммы момента двигателя без учета электромагнитных переходных процессов). Для ее построения произведем приведение моментов статического сопротивления и рабочих скоростей к валу двигателя, определим суммарный момент инерции привода и зададимся динамическим моментом при разгоне и замедлении привода. По результатам расчета строится нагрузочная диаграмма, а также тахограмма двигателя.
Моменты статического сопротивления, приведенные валу двигателя:
где - X,Y - индексы, которые принимают значения 41, 12, 23, 34 (т.е. данная формула используется четыре раза);




Суммарный момент инерции механической части привода:
где δ - коэффициент, учитывающий моменты инерции полумуфт и редуктора (принимаем δ=1,2).
Примечание. Считаем, что момент инерции не зависит от массы груза в кабине, поэтому подставляем в формулу массу номинального груза.
Модуль динамического момента двигателя определяем по условию максимального использования двигателя по перегрузочной способности:
|Mдин | =k(Mmax-|Mc|max),
где k - коэффициент, учитывающий увеличение максимального момента на уточненной нагрузочной диаграмме, k=0,95;
|Mc|max - максимальный по модулю статический момент, приведенный к валу двигателя.
М max= (2-2,5)МN
Принимаем М max= 195 Нм
|М дин |= 0,95·(216-107,23)=103,33 Нм.
Ускорение вала двигателя в переходных режимах:
Ускорение кабины лифта:
Расчетное ускорение кабины лифта не превышает максимально допустимое по исходным данным.
Разбиваем нагрузочную диаграмму на 16 интервалов: 4, 8, 12, 16 -интервалы пауз; 1, 5, 9, 13 - интервалы разгона; 3, 7, 11, 15 - интервалы замедления; 2, 6, 10, 14 - интервалы работы с установившейся скоростью. Вид тахограммы и нагрузочной диаграммы двигателя показан на рис.4. Выполним расчет нагрузочной диаграммы.
Продолжительность интервалов разгона-замедления:
Путь кабины при разгоне-замедлении: