Файл: Курсовой проект по дисциплине Автоматизированный электропривод.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 22.11.2023
Просмотров: 128
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
величины X1 выбираются исходя из решения трех перечисленных выше основных задач.
Для решения первой задачи (компенсации действия звена объекта методом последовательной коррекции) в структуру регулятора вводится звено, передаточная функция которого обратна по отношению к передаточной функции компенсируемого звена :
Содержание 3
70
7. ОСНОВЫ ТЕОРИИ СИСТЕМ ПОДЧИНЕННОГО РЕГУЛИРОВАНИЯ 71
Тогда при нулевых начальных условиях реакция САР описывается следующим выражением : 77
77
7. ГОСТ 12.1.019-79. Электробезопасность. Общие требования и номенклатура видов защиты . М.: Издательство стандартов, 1998. – 48 с. 88
R1(p) = [W1(p)]-1
Итак, в структурном отношении регулятор состоит из двух частей: компенсирующей и интегрирующей.
Следующий этап синтеза регулятора заключается в определении его параметров, оптимизирующих процессы регулирования по некоторому критерию. Параметры компенсирующей части регулятора полностью определяются параметрами объекта. Поэтому единственным варьируемым параметром регулятора, который может быть использован для оптимизации процесса, является постоянная времени его интегрирующего звена Т1. Эту
величину удобно выражать в долях от некомпенсируемой постоянной времени Tμ, используя коэффициент α1
Т1 = α1 Tμ
На рис. 26 показаны реакции САР на ступенчатое задающее воздействие при различных соотношениях постоянной времени интегрирующего звена регулятора и некомпенсируемой постоянной времени. При выборе коэффициента α1 <1 <μ реакция системы на типовое задающее воздействие протекает относительно быстро, но имеет сильно колебательный характер (кривая 1). При выборе α1>>1 , т.е. Т1 >>Tμ переходный процесс протекает гораздо медленнее и носит апериодический характер (кривая 3). Оптимальным вариантом настройки регулятора считается такой, при котором α1 =2 , то есть
(2.6)
Т1= Tμ,
Рис. 26 Реакции САР на ступенчатое задающее воздействие при различных вариантах настройки регулятора
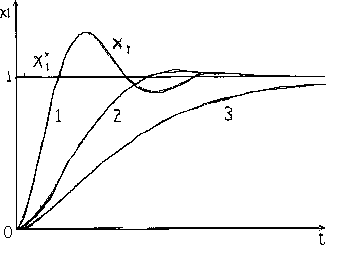
Этот вариант настройки регулятора по существу является компромиссным, удачно сочетающим достаточно высокую скорость протекания процесса с одной стороны и небольшое перерегулирование с другой (кривая 2 рис. 26). Такой вариант настройки системы носит специальное название; 200>
настройка на технический или модульный оптимум. Рассмотрим подробнее основные свойства системы, настроенной на модульный оптимум. С этой целью проведем эксперимент, схема которого и зображена на рис. 27

Рис.27. Схема эксперимента
Математически эксперимент описывается следующим образом. Пусть входной сигнал представляет собой единичную ступенчатую функцию времени :
X1*(t)=1(t)
Тогда при нулевых начальных условиях реакция САР описывается следующим выражением :



Рис. 28. График переходного процесса при настройке первой САР на модульный оптимум
График переходного процесса, характеризующего реакцию САР на скачок управляющего воздействия, изображен на рис. 28
Основные показатели переходного процесса при настройке системы на модульный оптимум следующие:
На практике эти показатели служат определенным стандартом, которому должна удовлетворять оптимально настроенная система.
Таким образом, оптимальная настройка регулятора обеспечивает переходный процесс с незначительным перерегулированием σ = 4.3% и реальной длительностью отработки задания (оцениваемой по времени достижения максимума) порядка 6.28 T μ.
Отсюда следует важный вывод о том, что благодаря компенсирующему действию регулятора быстродействие системы не зависит от параметров объекта регулирования и полностью определяется выбранной величиной базовой (некомпенсируемой) постоянной времени T μ. Поэтому величина T μ
может быть использована в качестве инструмента для достижения необходимого быстродействия САР при сохранении стандартного перерегулирования.
Для синтеза последующих регуляторов необходимо определение передаточной функции замкнутой системы регулирования величины как элемента, подчиненного следующему регулятору. Сначала найдем передаточную функцию разомкнутой системы :
 В итоге получаем ныражение, характеризующее стандартную передаточную функцию разомкнутой системы, настроенной на модульный оптимум :
В итоге получаем ныражение, характеризующее стандартную передаточную функцию разомкнутой системы, настроенной на модульный оптимум :

Пользуясь известной из теории автоматического регулирования [5] формулой замыкания системы единичной отрицательной обратной связью

найдем передаточную функцию замкнутой системы, настроенной на модульный оптимум :

Это выражение можно представить в так называемой канонической форме

Она характеризует рассмотренную САР, как оптимально демпфированную систему второго порядка с постоянной времени Θ1 = и коэффициентом демпфирования
и коэффициентом демпфирования 
8. СИСТЕМЫ РЕГУЛИРОВАНИЯ ТОКА ЯКОРЯ
В структуре многоконтурной системы подчиненного регулирования система регулирования тока якоря является внутренней САР, непосредственно воздействующей на силовую часть электропривода как объект регулирования.
8.1. Функциональная схема САР тока якоря
Рассмотрим сначала простейшую систему регулирования тока якоря двигателя, функциональная схема которой приведена на рис. 29
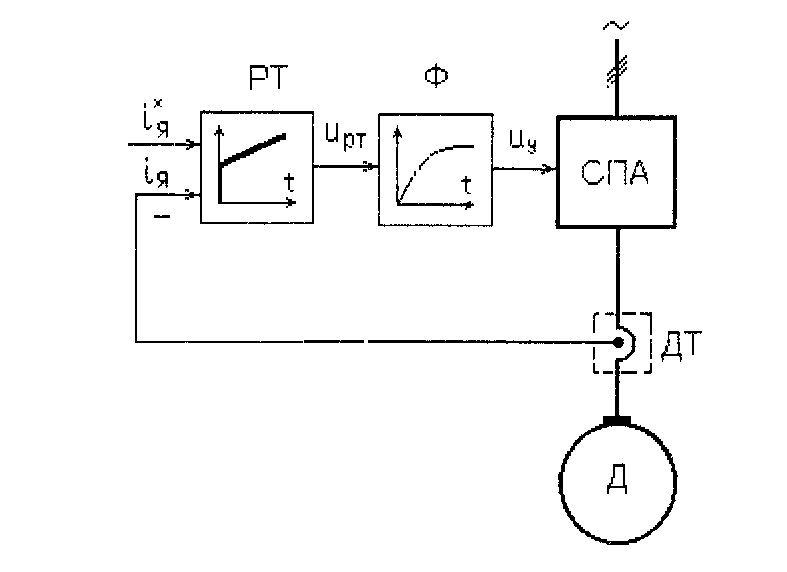
Рис. 29 Функциональная схема САР тока якоря
Здесь приняты следующие условные обозначения основных элементов системы :
РТ - регулятор тока якоря ;
Ф - фильтр, ограничивающий полосу пропускания САР ;
СПА - силовой преобразовательный агрегат ;
ДТ - датчик тока якоря ;
Д - двигатель постоянного тока независимого возбуждения.
Условные обозначения сигналов :
iя* - заданный ток якоря:
ia - фактический гок якоря;
uy - управляющее воздействие на входе СПА .
8.2. Синтез регуляторов тока якоря
Для синтеза регулятора воспользуемся математической моделью системы регулирования тока якоря, изображенной на рис. 30.
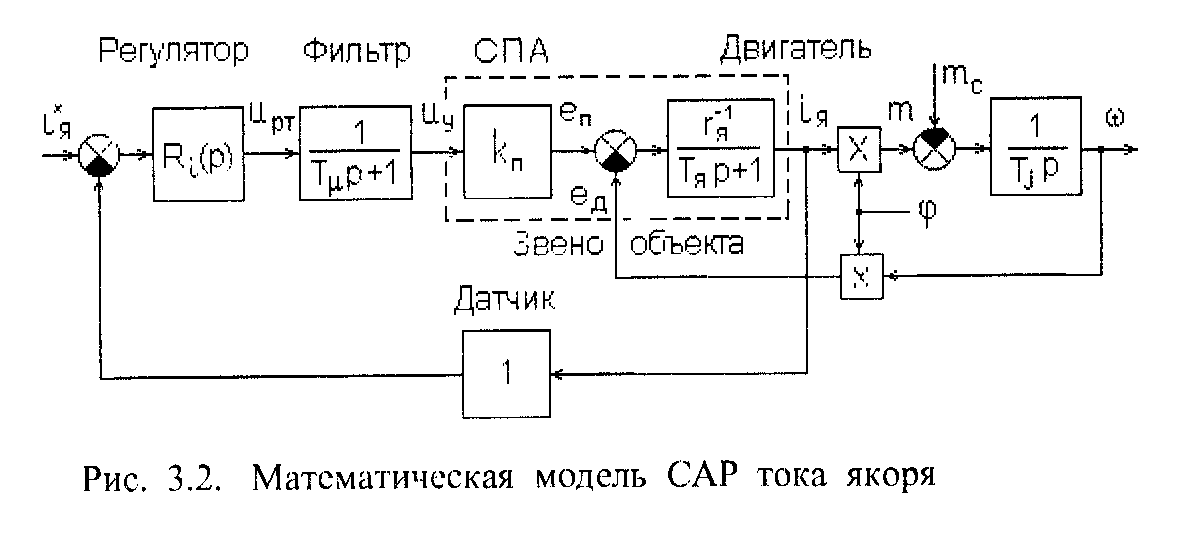
Рис. 30. Математическая модель Сар тока якоря
Типовая методика синтеза ориентирована на трехзвенную структуру прямого тракта САР. Поэтому для данной системы звено объекта имеет следующую передаточную функцию по управлению:

Особенность звена объекта состоит в том, что оно подвержено действию не только прямой связи с регулятором тока, но и внутренней обратной связи объекта по ЭДС якоря двигателя. Иными словами, структура объекта в данном случае не полностью соответствует идеализированной структурной схеме рис. 25. В первом приближении пренебрежем влиянием внутренней обратной связи по ЭДС. Кроме того, будем считать, что в цепи обратной связи но току используется безынерционный датчик с коэффициентом передачи Кдт = 1.
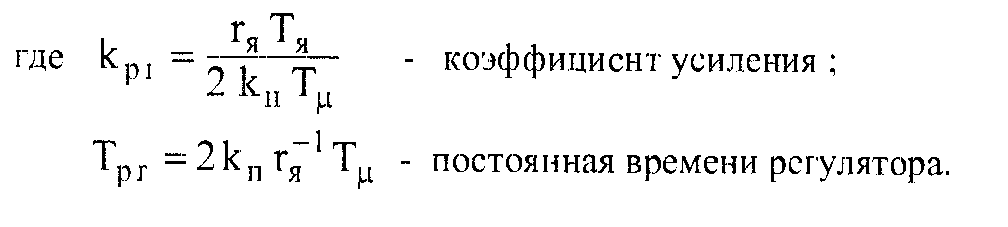
Согласно типовой методике передаточная функция регулятора тока якоря

где Тi=2Тμ, что соответствует условию настойки САР на модульный оптимум.
В итоге получаем регулятор тока со следующей передаточной функцией:

Данной передаточной функции соответствует следующая структурная схема регулятора:

Рис 31 Структурная схема регулятора тока
Таким образом, в результате применения стандартной методики получен регулятор тока ПИ - типа .
Использованная стандартная методика не учитывает влияния ЭДС двигателя на процессы регулирования тока. Однако в действительности такое влияние объективно существует, поскольку ток в цепи якоря зависит не только от ЭДС силового преобразовательного агрегата, но и от противо-ЭДС двигателя. В структуре математической модели силовой части это влияние отражается внутренней обратной связью по ЭДС двигателя. Рассмотрим подробнее вопросы учета внутренней обратной связи по ЭДС при синтезе САР тока якоря.
8.3. Анализ свойств САР тока якоря
Предположим сначала, что вал двигателя заторможен, то есть ω = 0. Очевидно, что при этом ЭДС якоря двигателя ед = φ. Пусть на вход САР тока якоря подается ступенчатый сигнал задания
Наблюдение ведется за фактическими значениями тока iя. Для определения реакции САР на данное воздействие найдем сначала передаточную функцию разомкнутой, а затем замкнутой системы.
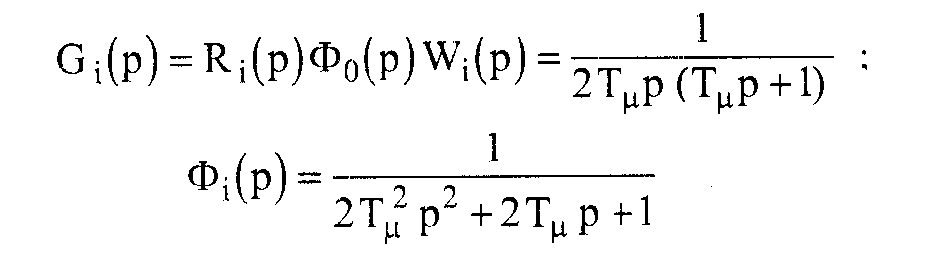
Полученные выражения совпадают с выражениями рассмотренных ранее стандартных передаточных функций первого (внутреннего) контура обобщенной структурной схемы СПР.
Следовательно можно утверждать, что реакция САР тока на внешние воздействия должна соответствовать стандартам, принятым для первой системы, настроенной на модульный оптимум.
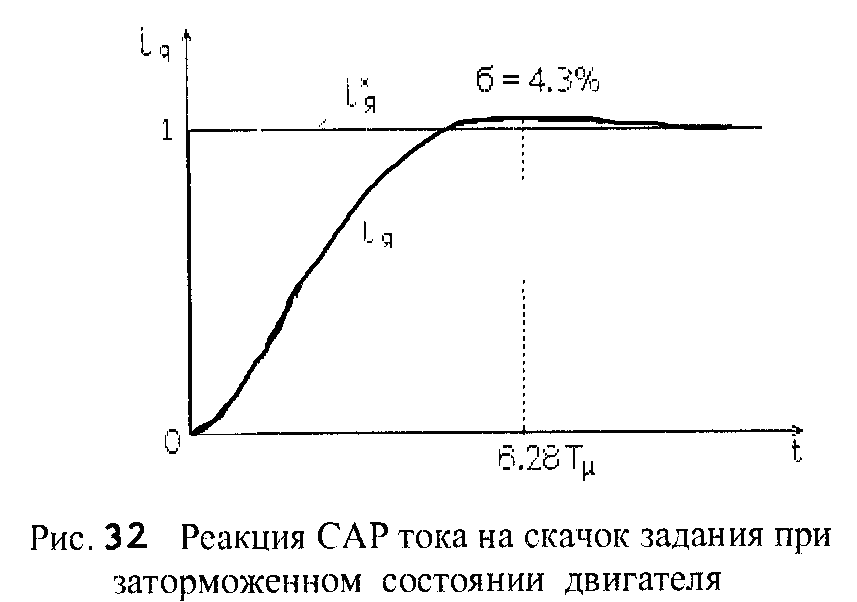
Такой результат мы действительно получим в том случае, если вал двигателя заторможен. При незаторможенном состоянии двигателя реакция САР тока на скачок задания вызывает разгон двигателя под действием развиваемого им электромагнитного момента, который пропорционален току якоря. С ростом скорости пропорционально увеличивается ЭДС двигателя. Вследствие влияния ЭДС реакция САР тока будет отличаться от стандартной (кривая 1 рис, 33.). Здесь же для сравнения приведена кривая 2 изменения тока при заторможенном состоянии двигателя, которая соответствует принятому стандарту.
Анализ реакции системы с учетом влияния ЭДС показывает, что установившееся значение тока якоря определяется формулой :

Для решения первой задачи (компенсации действия звена объекта методом последовательной коррекции) в структуру регулятора вводится звено, передаточная функция которого обратна по отношению к передаточной функции компенсируемого звена :
Содержание 3
70
7. ОСНОВЫ ТЕОРИИ СИСТЕМ ПОДЧИНЕННОГО РЕГУЛИРОВАНИЯ 71
Тогда при нулевых начальных условиях реакция САР описывается следующим выражением : 77
77
7. ГОСТ 12.1.019-79. Электробезопасность. Общие требования и номенклатура видов защиты . М.: Издательство стандартов, 1998. – 48 с. 88
R1(p) = [W1(p)]-1
Итак, в структурном отношении регулятор состоит из двух частей: компенсирующей и интегрирующей.
Следующий этап синтеза регулятора заключается в определении его параметров, оптимизирующих процессы регулирования по некоторому критерию. Параметры компенсирующей части регулятора полностью определяются параметрами объекта. Поэтому единственным варьируемым параметром регулятора, который может быть использован для оптимизации процесса, является постоянная времени его интегрирующего звена Т1. Эту
величину удобно выражать в долях от некомпенсируемой постоянной времени Tμ, используя коэффициент α1
Т1 = α1 Tμ
На рис. 26 показаны реакции САР на ступенчатое задающее воздействие при различных соотношениях постоянной времени интегрирующего звена регулятора и некомпенсируемой постоянной времени. При выборе коэффициента α1 <
(2.6)
Т1= Tμ,
Рис. 26 Реакции САР на ступенчатое задающее воздействие при различных вариантах настройки регулятора
Этот вариант настройки регулятора по существу является компромиссным, удачно сочетающим достаточно высокую скорость протекания процесса с одной стороны и небольшое перерегулирование с другой (кривая 2 рис. 26). Такой вариант настройки системы носит специальное название;
настройка на технический или модульный оптимум. Рассмотрим подробнее основные свойства системы, настроенной на модульный оптимум. С этой целью проведем эксперимент, схема которого и зображена на рис. 27
Рис.27. Схема эксперимента
Математически эксперимент описывается следующим образом. Пусть входной сигнал представляет собой единичную ступенчатую функцию времени :
X1*(t)=1(t)
Тогда при нулевых начальных условиях реакция САР описывается следующим выражением :
Рис. 28. График переходного процесса при настройке первой САР на модульный оптимум
График переходного процесса, характеризующего реакцию САР на скачок управляющего воздействия, изображен на рис. 28
Основные показатели переходного процесса при настройке системы на модульный оптимум следующие:
-
время первого согласования 4.7T μ -
время достижения максимума 6.28 T μ -
время достижения зоны 5% 4.1 T μ -
отклонения время достижения зоны 1% 8 T μ -
отклонения перерегулирование 4.3 T μ
На практике эти показатели служат определенным стандартом, которому должна удовлетворять оптимально настроенная система.
Таким образом, оптимальная настройка регулятора обеспечивает переходный процесс с незначительным перерегулированием σ = 4.3% и реальной длительностью отработки задания (оцениваемой по времени достижения максимума) порядка 6.28 T μ.
Отсюда следует важный вывод о том, что благодаря компенсирующему действию регулятора быстродействие системы не зависит от параметров объекта регулирования и полностью определяется выбранной величиной базовой (некомпенсируемой) постоянной времени T μ. Поэтому величина T μ
может быть использована в качестве инструмента для достижения необходимого быстродействия САР при сохранении стандартного перерегулирования.
Для синтеза последующих регуляторов необходимо определение передаточной функции замкнутой системы регулирования величины как элемента, подчиненного следующему регулятору. Сначала найдем передаточную функцию разомкнутой системы :
В итоге получаем ныражение, характеризующее стандартную передаточную функцию разомкнутой системы, настроенной на модульный оптимум : Пользуясь известной из теории автоматического регулирования [5] формулой замыкания системы единичной отрицательной обратной связью
найдем передаточную функцию замкнутой системы, настроенной на модульный оптимум :
Это выражение можно представить в так называемой канонической форме
Она характеризует рассмотренную САР, как оптимально демпфированную систему второго порядка с постоянной времени Θ1 =
8. СИСТЕМЫ РЕГУЛИРОВАНИЯ ТОКА ЯКОРЯ
В структуре многоконтурной системы подчиненного регулирования система регулирования тока якоря является внутренней САР, непосредственно воздействующей на силовую часть электропривода как объект регулирования.
8.1. Функциональная схема САР тока якоря
Рассмотрим сначала простейшую систему регулирования тока якоря двигателя, функциональная схема которой приведена на рис. 29
Рис. 29 Функциональная схема САР тока якоря
Здесь приняты следующие условные обозначения основных элементов системы :
РТ - регулятор тока якоря ;
Ф - фильтр, ограничивающий полосу пропускания САР ;
СПА - силовой преобразовательный агрегат ;
ДТ - датчик тока якоря ;
Д - двигатель постоянного тока независимого возбуждения.
Условные обозначения сигналов :
iя* - заданный ток якоря:
ia - фактический гок якоря;
uy - управляющее воздействие на входе СПА .
8.2. Синтез регуляторов тока якоря
Для синтеза регулятора воспользуемся математической моделью системы регулирования тока якоря, изображенной на рис. 30.
Рис. 30. Математическая модель Сар тока якоря
Типовая методика синтеза ориентирована на трехзвенную структуру прямого тракта САР. Поэтому для данной системы звено объекта имеет следующую передаточную функцию по управлению:
Особенность звена объекта состоит в том, что оно подвержено действию не только прямой связи с регулятором тока, но и внутренней обратной связи объекта по ЭДС якоря двигателя. Иными словами, структура объекта в данном случае не полностью соответствует идеализированной структурной схеме рис. 25. В первом приближении пренебрежем влиянием внутренней обратной связи по ЭДС. Кроме того, будем считать, что в цепи обратной связи но току используется безынерционный датчик с коэффициентом передачи Кдт = 1.
Согласно типовой методике передаточная функция регулятора тока якоря
где Тi=2Тμ, что соответствует условию настойки САР на модульный оптимум.
В итоге получаем регулятор тока со следующей передаточной функцией:
Данной передаточной функции соответствует следующая структурная схема регулятора:
Рис 31 Структурная схема регулятора тока
Таким образом, в результате применения стандартной методики получен регулятор тока ПИ - типа .
Использованная стандартная методика не учитывает влияния ЭДС двигателя на процессы регулирования тока. Однако в действительности такое влияние объективно существует, поскольку ток в цепи якоря зависит не только от ЭДС силового преобразовательного агрегата, но и от противо-ЭДС двигателя. В структуре математической модели силовой части это влияние отражается внутренней обратной связью по ЭДС двигателя. Рассмотрим подробнее вопросы учета внутренней обратной связи по ЭДС при синтезе САР тока якоря.
8.3. Анализ свойств САР тока якоря
Предположим сначала, что вал двигателя заторможен, то есть ω = 0. Очевидно, что при этом ЭДС якоря двигателя ед = φ. Пусть на вход САР тока якоря подается ступенчатый сигнал задания
Наблюдение ведется за фактическими значениями тока iя. Для определения реакции САР на данное воздействие найдем сначала передаточную функцию разомкнутой, а затем замкнутой системы.
Полученные выражения совпадают с выражениями рассмотренных ранее стандартных передаточных функций первого (внутреннего) контура обобщенной структурной схемы СПР.
Следовательно можно утверждать, что реакция САР тока на внешние воздействия должна соответствовать стандартам, принятым для первой системы, настроенной на модульный оптимум.
Такой результат мы действительно получим в том случае, если вал двигателя заторможен. При незаторможенном состоянии двигателя реакция САР тока на скачок задания вызывает разгон двигателя под действием развиваемого им электромагнитного момента, который пропорционален току якоря. С ростом скорости пропорционально увеличивается ЭДС двигателя. Вследствие влияния ЭДС реакция САР тока будет отличаться от стандартной (кривая 1 рис, 33.). Здесь же для сравнения приведена кривая 2 изменения тока при заторможенном состоянии двигателя, которая соответствует принятому стандарту.
Анализ реакции системы с учетом влияния ЭДС показывает, что установившееся значение тока якоря определяется формулой :