Файл: Практикум Краснодар Кубгау 2016 удк 528. 41 (075. 8).doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 23.11.2023
Просмотров: 245
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
СОДЕРЖАНИЕ
Характеристика природных категорий сложности для всех видов работ главы 1
КОЭФФИЦИЕНТЫ К ЦЕНАМ СБОРНИКА С УЧЕТОМ
ПРИРОДНО-ЭКОНОМИЧЕСКИХ ОСОБЕННОСТЕЙ ТЕРРИТОРИИ
РАСПРЕДЕЛЕНИЕ ТАБЛИЦ СБОРНИКА ПО УСЛОВИЯМ
ИЗГОТОВЛЕНИЯ ПРОЕКТНОЙ И ИЗЫСКАТЕЛЬСКОЙ ПРОДУКЦИИ
КОЭФФИЦИЕНТЫ К ЦЕНАМ НА РАБОТЫ, ВЫПОЛНЯЕМЫЕ В УСЛОВИЯХ КОМАНДИРОВКИ В НЕБЛАГОПРИЯТНЫЙ ПЕРИОД ГОДА
НОРМАТИВНАЯ ДОЛЯ ЗАТРАТ ТРУДА, ПРИХОДЯЩИХСЯ
МЕТОДИКА РАСЧЕТА КОЭФФИЦИЕНТОВ ЗА НЕБЛАГОПРИЯТНЫЙ ПЕРИОД, В ГОРНЫХ И ВЫСОКОГОРНЫХ УСЛОВИЯХ,
НА ОБЪЕКТАХ СО СПЕЦИАЛЬНЫМ РЕЖИМОМ
МЕТОДИКА РАСЧЕТА СТОИМОСТИ ПЕРЕЕЗДОВ НА ОБЪЕКТ И ОБРАТНО
– способ непосредственного примыкания концов хода к исходным пунктам (варианты привязки – азимутальная, координатная привязка);
– привязка к отдаленным исходным пунктам (снос координат с вершины знака на землю);
– привязка к стенным знакам (способ редуцирования, способ угловых и линейных засечек, полярный способ).
В зависимости от схемы привязки различают следующие виды теодолитных ходов:
– замкнутый ход – ход с опорой начала и конца хода на один и тот же исходный пункт (рисунок 5);
– разомкнутый ход – ход с опорой своими концами на разные исходные пункты и направления;
– висячий ход – ход с опорой на исходные пункты только началом хода.
По геометрической форме ходы подразделяются на вытянутые, близкие по форме к прямолинейным, и ходы изогнутые произвольной формы.
В качестве критерия степени изогнутости иногда используют отношение
L : [S] >1,30, (16)
где [S] – сумма длин сторон хода полигонометрии;
L – длина замыкающей хода.
Во многих случаях вытянутым можно считать ход, если это соотношение выполняется.
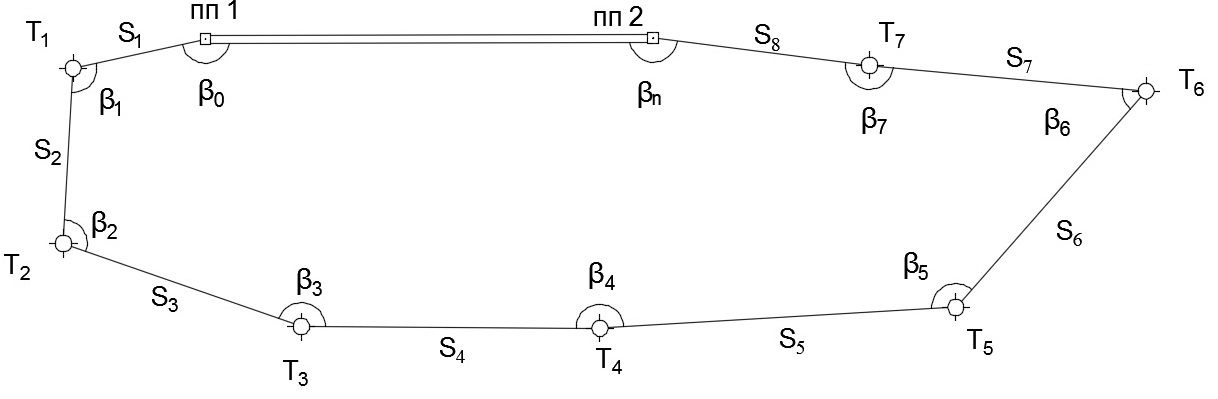
Рисунок 5 – Замкнутый теодолитный ход
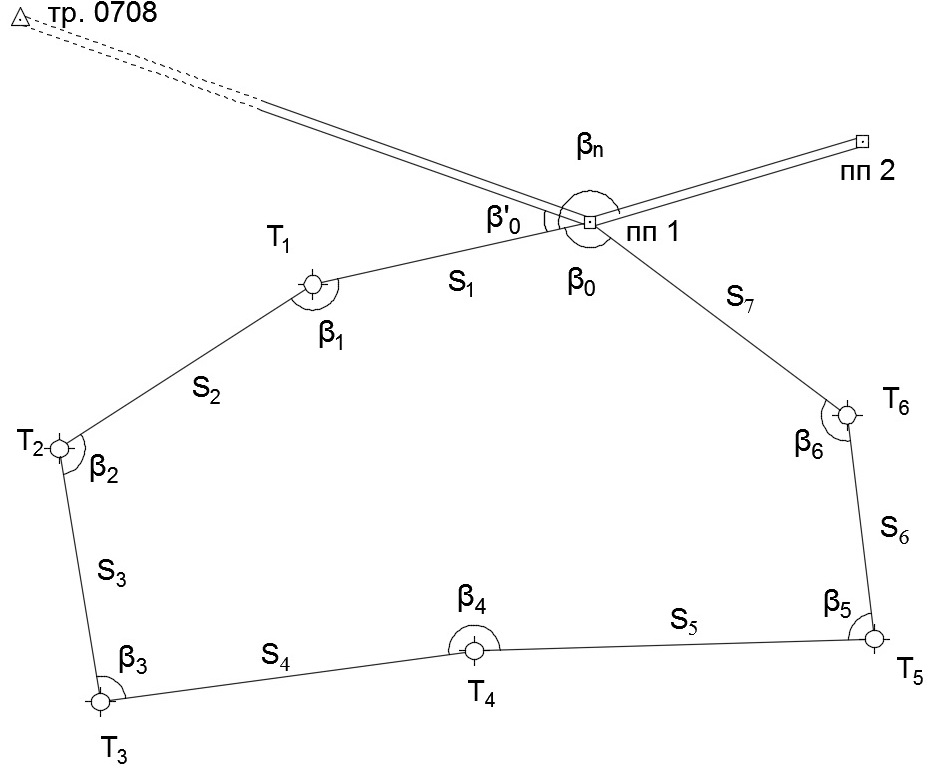
Рисунок 6 – Замкнутый теодолитный ход с двумя примычными
направлениями
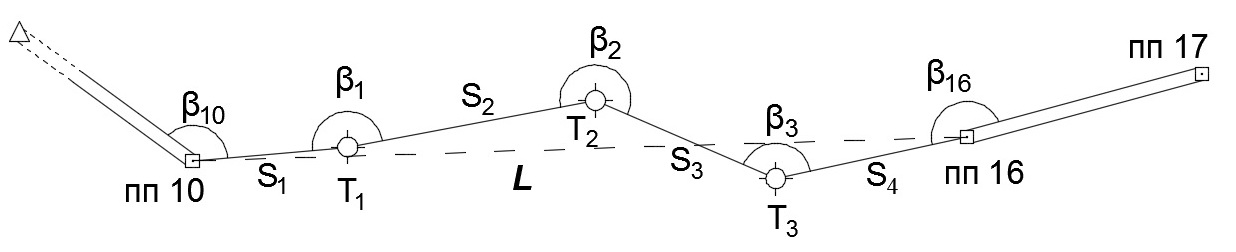
Рисунок 7 – Разомкнутый теодолитный ход вытянутой формы
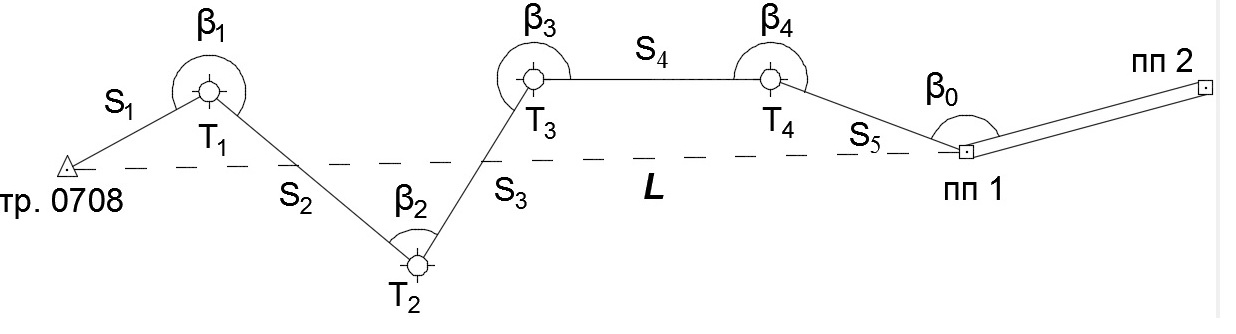
Рисунок 8 – Разомкнутый теодолитный ход произвольной формы
с координатной привязкой
При проектировании теодолитных ходов должны соблюдаться следующие требования:
– расположение теодолитных ходов должно отвечать назначению и целям их проложения;
– обеспечение должной схемы (конфигурации) системы ходов, т.е. должна быть обеспечена предельная длина теодолитных ходов между пунктами опорных геодезических сетей и узловыми точками ходов;
– соблюдение, по возможности, прямолинейности ходов и равенства длин его сторон;
– удобство измерений длин и углов и др.
Некоторые технические характеристики теодолитных ходов для разных масштабов топографической съемки приведены в таблице 8.
Таблица 8 – Технические характеристики теодолитных ходов
| Масштаб топографической съемки | Предельная длина теодолитного хода, км | Предельная абсолютная невязка теодолитного хода, м | ||
| Между исходными геодезическими пунктами | Между исходными пунктами и узловыми точками (или между узловыми точками) | Застроенная территория | Незастроенная территория, закрытая древесной и кустарниковой растительностью | |
| 1 : 5 000 1 : 2 000 1 : 1 000 1 : 500 | 6,0 3,0 1,8 0,9 | 4,2 2,1 1,3 0,6 | 2,0 1,0 0,6 0,3 | 3,0 1,5 0,9 0,4 |
| Примечание – При использовании для измерения сторон теодолитного хода светодальномеров и электронных тахеометров предельная длина хода может быть увеличена в 1,3 раза, при этом предельные длины сторон хода не увеличиваются, количество сторон в ходе не должно превышать: при съемке в масштабе 1 : 5 000 и 1 : 2 000 в открытой местности – 50 и в закрытой – 100, в масштабе 1 : 1 000 – 40 и 80, соответственно характеристике местности. | ||||
Отдельный теодолитный ход должен опираться на два исходных пункта и два исходных дирекционных угла. Допускается проложение теодолитного хода, опирающегося на два исходных пункта, без угловой привязки на одном из них, а также, в исключительных случаях, координатная привязка (без измерения примычных углов) к пунктам опорной геодезической сети, при условии выполнения угловых измерений двумя приемами.
Длина линий (сторон) теодолитного хода допускается не более 500 м и не менее 20м на застроенной территории и 40 м – на незастроенной.
Допускается проложение висячих теодолитных ходов с числом сторон не более трех. Длины висячих ходов на незастроенных территориях не должны быть более 500 м при съемке масштаба 1 : 5 000, 300 м – при съемке в масштабе 1 : 2 000 и 150 м при съемке в масштабах 1 : 1 000 и 1 : 500. Длины висячих ходов на застроенных территориях должны приниматься соответственно с коэффициентом 0,7.
Проект выполняют на карте карандашом. Затем вычерчивают проектную схему сгущения планового обоснования в рабочей тетради. Разработанный вариант проекта представляют преподавателю для предварительной проверки. При проектировании опорной межевой сети соблюдают требования действующих инструкций.
Межевое съемочное обоснование создают с целью сгущения плановой и высотной основы до плотности, обеспечивающей выполнение съемки ситуации и привязки углов поворотов границ земельных участков тем или иным методом.
Точки теодолитных ходов должны располагаться в местах с хорошим обзором местности; между смежными вершинами теодолитного хода должна обеспечиваться хорошая видимость. Точки теодолитного хода следует располагать вдоль дорог, желательно с твердым покрытием, на пересечении дорог, а также возле столбов линий электропередач (ЛЭП) или связи и т. п. Места расположения точек ОМС, МСС должны обеспечивать длительную их сохранность. Особое внимание следует обратить на привязку теодолитных ходов к пунктам геодезической опорной сети.
Предрасчет точности запроектированной сети
Проект геодезических сетей сгущения и съемочных сетей составляется, как правило, на картах масштаба 1 : 5 000 –1 : 25 000. Примерные проекты (схемы) развития планового обоснования приведены в приложениях К–Н. После согласования проекта развития планового обоснования с преподавателем, приступают к оценке точности запроектированной
сети.
Ожидаемые ошибки определения конечных точек каждого хода вычисляют по приведенным ниже формулам:
– для вытянутых ходов
– для ломаных ходов
где mS – средняя квадратическая погрешность измерения длин сторон;
n – число сторон в ходе;
mβ – средняя квадратическая погрешность измерения углов;
[S] – сумма длин сторон хода;
D(ц)i– расстояние между точкой хода с номером i и центром тяжести полигонометрического хода.
Для изогнутого теодолитного хода определить коэффициент вытянутости теодолитного хода по формуле (16).
Для изогнутых теодолитных ходов, координаты центра тяжести хода находится по формулам:
где
n+1 – количество точек хода.
Для оценки точности запроектированной сети предварительно вычерчивают схему теодолитных ходов. И если это система теодолитных ходов с узловыми точками, то на ней показывают стрелками ходы между исходным пунктом и узловой точкой и ходы между узловыми точками, например Z1, Z2, Z3 ….
Для одиночного полигонометрического или теодолитного хода предрасчет точности выполнит по формулам (16, 17, 18).
Рассмотрим порядок вычисления ожидаемых погрешностей на примере системы теодолитных ходов с двумя узловыми точками (рисунок 9).
Количество линий n и длины ходов в рассматриваемом примере приведены в таблице 9.
Таблица 9 – Количество линий и длины ходов
| Номер хода | Количество линий в ходе | Длина хода, км |
| Z1 | 5 | 2,55 |
| Z2 | 6 | 1,75 |
| Z3 | 7 | 2,20 |
| Z4 | 3 | 1,35 |
| Примечание – Длина хода находится как сумма длин сторон запроектированного теодолитного хода. Длины сторон измеряются студентом по карте с точностью до 0,05 км. | ||
Средняя длина линии теодолитных ходов, в приведенном выше примере, получилась равной 380 м.
Для оценки точности определения положений узловых точек I и II в системе ходов (рисунок 9) примем
ms= 15 мм, mβ=
Рисунок 9 – Схема теодолитных ходов
Вычисленные средние ожидаемые погрешности положения конечных точек ходов по формуле (17) представлены в таблице 10.
Таблица 10 – Средние ожидаемые погрешности положения конечных
точек ходов
| Номер хода | |  | М2 | М, мм | |
| Z1 Z2 Z3 Z4 | 1125 1350 1575 675 | 10 189 5 712 10 362 1 692 | 11 314 7 062 11 937 2 367 | 106 84 109 49 | 1 : 24 000 1 : 21 430 1 : 21 100 1 : 24 490 |
Веса определения положения узловой точки I по ходам Z1, Z2 и Z3 вычисляются по формулам:
Принимая С = 100 000, по приведенным в таблице 5 величинам М, получим: Р1 = 9; Р2 = 14; Р3 = 8.
Общий вес определения положения узловой точки I будет
или
Аналогично для второй узловой точки получим:
Р2 = 14; Р3 = 8; Р4 = 42; тогда
с учетом (6)
Во втором приближении полученные средние квадратические погрешности узловых точек I и II следует учесть как ошибки исходных данных. Следовательно, для узловой точки I получим:
по первому ходу Mz1 = 106 мм и
по второму ходу
по третьему ходу
Тогда веса по ходам во втором приближении будут:
РZ1 = 9; РZ2 = 12; РZ3 = 8;