Добавлен: 29.11.2023
Просмотров: 161
Скачиваний: 7
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
СОДЕРЖАНИЕ
Введение…………………………………………………………………......3
1 Этапы развития автоматизации………………………………………....4
-
Истоки развития автоматизации……………………………..4 -
Первый этап развития автоматизации……………………....6 -
Второй этап развития автоматизации………………………10 -
Третий этап развития автоматизации……………………....13
2 Автоматизированная система обжига керамических изделий………17
2.1 Характеристика объекта автоматизации …………………………...17
2.2 Техническое обеспечение системы…………………………………..18
2.3 Программное обеспечение системы………………………………...18
2.4 Описание работы системы…………………………………………...21
Заключение………………………………………………………………..25
Библиографический список ……………………………………………..26
ВВЕДЕНИЕ
Автоматизация- это направление научно-технического прогресса, которое использует саморегулирующие технические средства и математические методы с целью облегченья жизни человека в различных отраслях.
Автоматизация производства - это закономерный процесс развития общественного производства , при котором функции управления и контроля, ранее выполнявшиеся человеком, передаются приборам и автоматическим устройствам.
Целью автоматизации производства является повышенная эффективность производства труда, повышенное качество продукции, повышение безопасности. Автоматизация позволяет повысить производительность труда, улучшить качество продукции, оптимизировать процессы управления, отстранить человека от производств, опасных для здоровья. Автоматизация, за исключением простейших случаев, требует комплексного, системного подхода к решению задачи. Применяемые методы вычислений иногда копируют нервные и мыслительные функции человека. Весь этот комплекс средств обычно называют системами. В качестве оценочной характеристики может выступать понятие уровня (степени) автоматизации , экологии и экономности.
1 ЭТАПЫ РАЗВИТИЯ АВТОМАТИЗАЦИИ
1.1 Истоки автоматизации (II век до н. э – начало XVIII века)
Начало автоматизации пришло к нам еще из глубокой древности, где появлялись первые простейшие автоматы. Слово «автоматика» заимствовано из древнегреческого языка, где оно означало самодействие. В Египте во II веке до н.э. впервые появились первые самодействующие устройства, о чем в своей книге «Пневматика» Герон Старший, живший в Александрии в I веке.Такого рода автоматы изначально применялись в религиозных целях для показа «божественных» чудес. Автоматы применялись в Александрийском храме, где с их помощью жрецы творили чудеса. Примеры автоматов представлены на рисунках ниже.
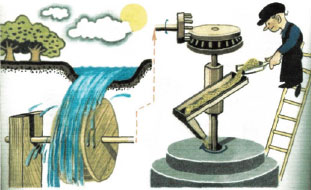
Рисунок 1- Механическое устройство для регулирования подачи зерна на водяной мельнице.
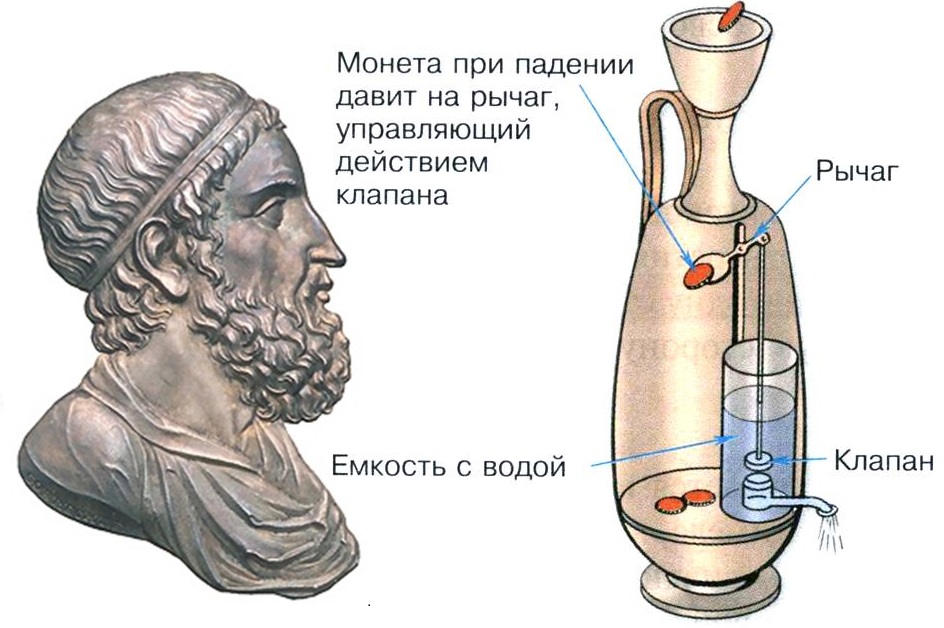
Рисунок 2 - Автомат для продажи святой воды.
Ловушки. Они были наиболее ранними автоматами .При конструкции этих ловушек человек стремился воспроизвести явления, которые он видел: климатические условия данной местности , природные условия ,различные повадки животных. Чтобы обмануть зверя расставленные ловушки тщательно маскировались ветками, сучьями и т.д.
Наиболее простыми были ловушки давящего типа. »Рабочим телом» такой ловушки часто служило бревно или камень, поднятый на определенную высоту и удерживаемый в таком положении с помощью подпорки или веревки .Эта подпорка одновременно являлась и пусковым механизмом ,на котором располагалась приманка .Теребя приманку ,животное выдергивало подпорку ,камень падал на него и животное погибало от этого удара .Однако при большом весе падающего предмета .который мог слишком крепко зажать палку, такой пусковой механизм оказывался ненадежным. Ниже на рисунке 3 представлена ловушка давящего типа.

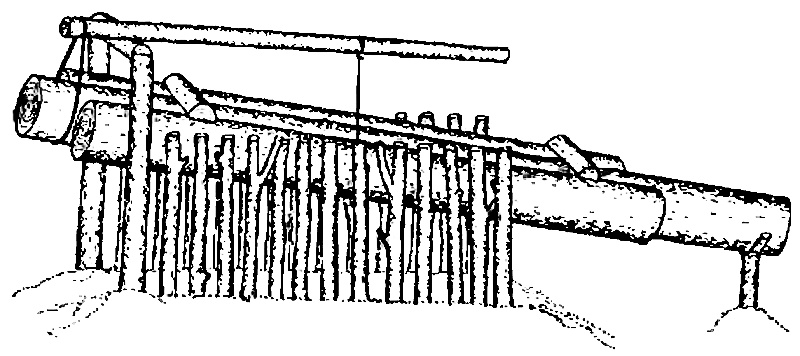
Рисунок 3- Ловушка давящего типа
1.2 Первый этап развития автоматизации (с начала XVIII – до конца XIX столетия)
Начало XVIII до конца XIX-период времени ,который охватывает первый этап автоматизации. Проблема самоходного суппорта разрешилась с изобретением А. К. Нартовым в 1712 году токарно-копировального станка. Во второй половине XVIII века значительно расширилась сфера использования металлорежущих станков, начались усиленные поиски универсального токарного станка. Проблема механизированного передвижения резца стала особенно острой, когда приходилось нарезать резьбу, изготавливать зубчатые колеса, наносить на предметы роскоши сложные узоры. А. К. Нартов успешно решил вопрос механизации операции. Копировальный палец и суппорт двигались благодаря одному ходовому винту, но шаг нарезки под копиром и резцом были разные. Соответственно была решена проблема автоматического передвижения суппорта вдоль оси заготовки. Поперечная подача пока отсутствовала, ее заменило качание системы «копир-заготовка».В 1764—1766 годах Ползунов сконструировал новый паровой двигатель для привода дутья плавильных печей. Двигатель имел рекордную для своего времени мощность 32 л. с. и впервые позволил отказаться от водяных колёс в реальном заводском производстве. Также , в 1765г. И.И. Ползуновым был создан первый в мире промышленный автоматический регулятор для поддержания постоянного уровня воды в котле паровой машинызадачей этого регулятора являлось поддержание в паровом котле постоянного уровня воды. Регулятор представлял собой поплавок ,связанный системой рычагов с регулирующей заслонкой .При увеличении уровня поплавок поднимается, в результате чего заслонка опускается, перекрывая трубопровод и уменьшая подачу воды в котел. При уменьшении уровня поплавок опускается, подача воды увеличивается, уровень повышается. В регуляторе Ползунова была реализована идея ,являющаяся и поныне центральной в устройствах автоматического регулирования.В 1784 году Дж. Уатт сконструировал центробежный регулятор числа оборотов вала паровой машины . При изменении числа оборотов вала грузы под действием центробежной силы изменяют свое положение, что приводит к перемещению регулирующего органа и изменению подачи пара. Это вызывает изменение числа оборотов вала. На протяжении всего XIXстолетия происходило улучшение регуляторов для паровых машин.На первом этапе развития автоматизации были попытки создания автоматических станков и линий с жёсткой кинематической связью.
Центробежный регулятор (регулятор Уатта) - автоматический устройство, работа которого базируется на использованные центробежной силы для стабилизации вращения путем воздействия на положение дроссельной заслонки регулирования подачи пары в паровую машину.
Центробежный регулятор состоит из: вала регулятора с приводным шкивом или зубчатым колесом, двух грузиков, подвешенных на рычагах, двух тяг, соединяющих рычаги с муфтой, скользящая по валу муфта, коромысла, одним концом закрепленного в выемке муфты, а вторым соединенного с тягой привода дроссельной заслонки.
Если машина находится в покое то гири (шарики) находятся внизу, а заслонка в открытом состоянии. Если подать пару, то паровая машина начнет работать. Вращающееся колесо машины передает движение на регулятор оборотов - шарики начинают вращаться. На шарики регулятора действуют две силы. Сила тяжести, пытается опустить шарики вниз, а такжецентробежная сила, пытается переместить шарики в направлении от оси вращения. При такой конструкции регулятора это приведет к поднятию шариков вверх. Движение шариков повлечет закрытие заслонки, а это уменьшит подачу пара в паровую машину. Частота вращения уменьшится, уменьшится и центробежная сила, шарики опускаются вызывая открытие заслонки, обеспечит увеличение подачи пара.В зависимости от подобранных характеристик машины, регулятора, пара и нагрузки паровая машина могла ритмично поддерживать колебания частоты вращения в окрестности определенного значения, а если параметры хорошо подобраны то устанавливалась постоянная скорость. Для обеспечения устойчивости работы необходимо чтобы муфта перемещался в условиях трения. Чем выше момент инерции машины, тем сильнее должно быть трения. На современных мощных двигателях для этого используется демпфер.Регулятор изображен на рисунке является гравитационным регулятором, обеспечивает стабилизацию только одной частоты вращения. Чтобы изменить эту скорость следовало остановить машину и заменить шарики на более легкие (меньше обороты) или тяжелые (большие обороты). Данный регулятор представлен ниже на рисунке 4.
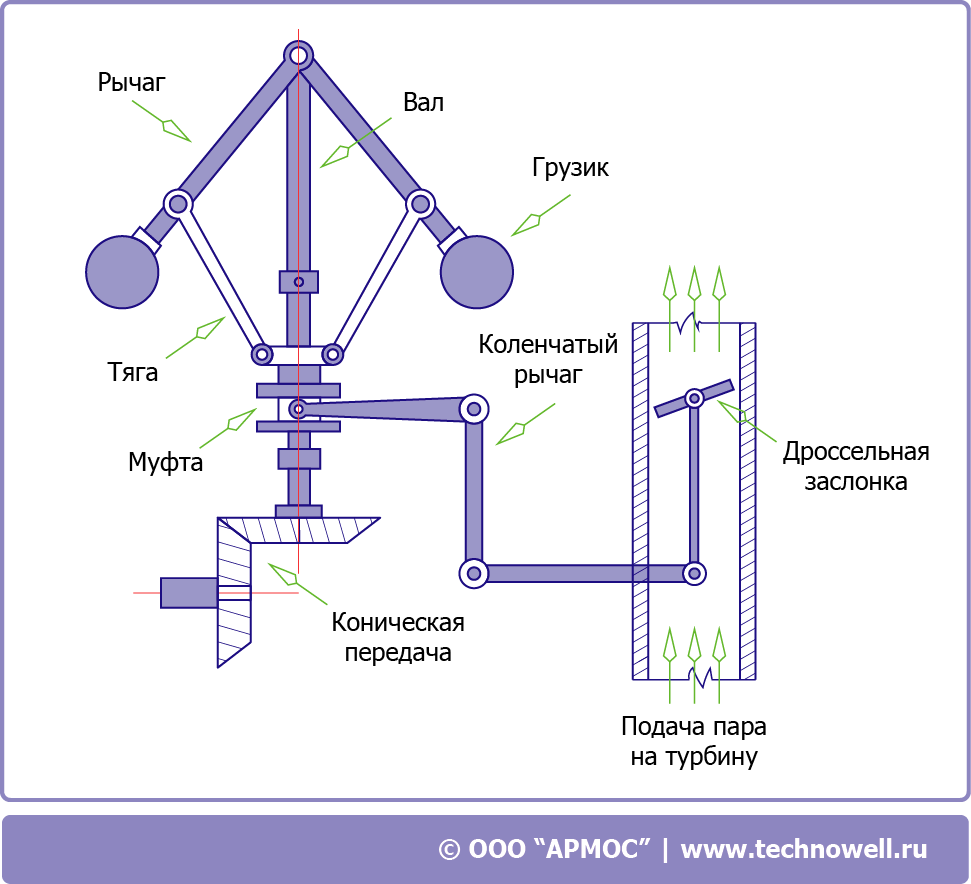
Рисунок 4 – Центробежный регулятор скорости Уатта
Началом создания современных автоматических систем принято считать: создание в 1765 г. русским механиком И.И.Ползуновым (творцом первой паровой машины универсального назначения) первого в мире промышленного автоматического регулятора для поддержания постоянного уровня воды в котле паровой машины.
Принцип действия и внешний вид поршневой паровой машины показан на рисунках 5 и 6. Работа поршня 1 посредством штока 2, ползуна 3, шатуна 4 и кривошипа 5 передаётся главному валу 6, несущему маховик 7, который служит для снижения неравномерности вращения вала. Эксцентрик, сидящий на главном валу, с помощью эксцентриковой тяги приводит в движение золотник 8, управляющий впуском пара в полости цилиндра. Пар из цилиндра выпускается в атмосферу или поступает в конденсатор. Для поддержания постоянного числа оборотов вала при изменяющейся нагрузке паровые машины снабжаются центробежным регулятором 9, автоматически изменяющим сечение прохода пара, поступающего в паровую машину (дроссельное регулирование), или момент отсечки наполнения (количественное регулирование).
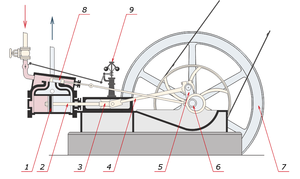
Рисунок 5- принцип работы паровой машины
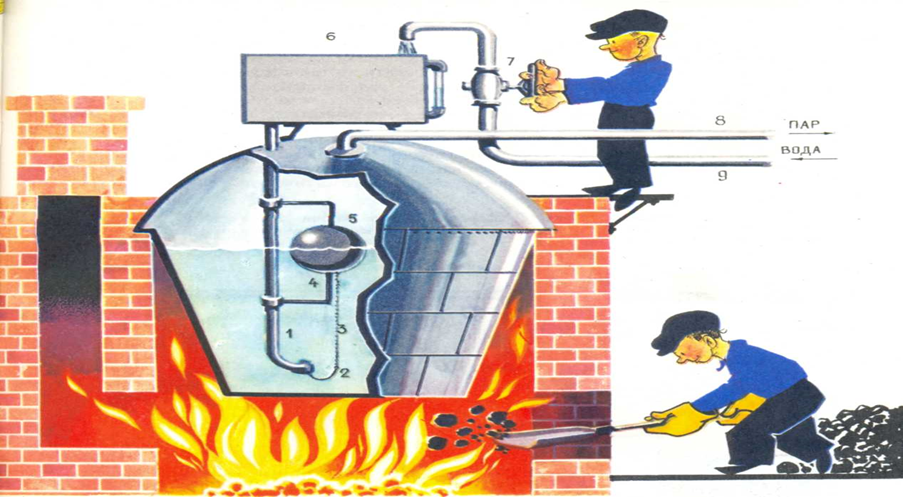
Рисунок 6 - Паровая машина
1.3 Второй этап развития автоматизации (конец XIX - середина XX столетия)
Второй этап развития автоматизации производства охватывает период времени конец XIX и середина XX столетия. Этот этап связан с развитием электротехники и практическим использованием электричества в средствах автоматизации. В частности, важное значение имеет изобретение П.Л.Шиллнгом магнитоэлектрического реле (1850 г.) - одного из основных элементов электроавтоматики, разработка Ф.М.Балюкевичем и др. в 80-х г.г. .XIX столетия ряда устройств автоматической сигнализации на ж.-д. транспорте, создание С.Н.Апостоловым-Бердичевским и др. первой в мире автоматической телефонной станции.К началу XX века относится широкое развитие и использование электрических систем автоматического регулирования. Индивидуальный привод отдельных рабочих органов машин и введение между ними электрических связей существенно упростили кинематику машин, сделали их менее большими и более надёжными. Будучи более гибкими и удобными в эксплуатации, электрические связи позволили создать комбинированное электрическое и механическое программное управление, обеспечивающее автоматическое выполнение неизмеримо более сложных операций, чем на машинах-автоматах с механическим программным устройством. Для второго этапа развития автоматизации характерно появление электронно-программного управления: были созданы станки с числовым программным управлением, обрабатывающие центры и автоматические линии, содержащие в качестве компонента оборудование с программным управлением.
Автоматической линией называют автоматически действующую систему машин, установленных в технологической последовательности и объединенных средствами транспортировки, загрузки, контроля, управления и устранения отходов. Например, линия по обработке механической обработки зубчатого колеса. Эта линия состоит из технологического оборудования, которое компонуется под определенный вид транспорта и связывается с ним устройствами загрузки (манипуляторами, лотками, подъемниками). Линия включает кроме рабочих позиций и холостые позиции, которые необходимы для осмотра и обслуживания линии . Данная линия представлена ниже на рисунке 7.
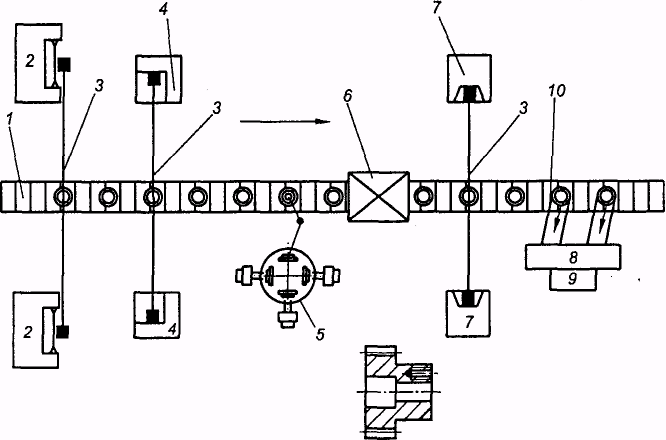
Рисунок 7-Автоматическая линия механической обработки зубчатого колеса
Автоматическая линия:1 — пластинчатый транспортер; 2 — токарный станок; 3 — портальный манипулятор; 4 — зубообрабатывающий станок; 5 — агрегатный станок; 6 — моечная установка; 7 — шлифовальный станок; 8 — контрольная станция; 9 — емкость для бракованных деталей; 10 — лоток.
Первый электромеханический генератор был предложен Фарадеем в 1832 г. сразу после открытия им закона электромагнитной индукции. Диск Фарадея содержит: статор в виде подковообразного магнита , медный диск , снабженный подвижными контактами на оси и ободе. При вращении диска в магнитном поле в нем наводится ЭДС постоянного знака, вызывающая индукционные токи, текущие по правилу правой руки радиально, т. е. между осью и ободом (в данном случае, снизу вверх). По правилу Ленца индукционные токи создают магнитный поток, препятствующий потоку магнита, т. е. направленный вдоль оси вращения диска. Это единственный известный униполярный генератор постоянного тока, применяемый для выработки больших токов до сих пор. Остальные генераторы постоянного тока являются, по существу, генераторами переменного тока с выпрямителем (коммутатором) на выходе.(1-подковообразный магнит,2-медный диск). Данный диск представлен ниже на рисунке 8.
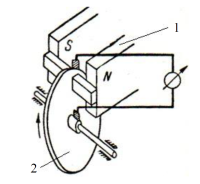
Рисунок 8-Диск Фарадея