Файл: Синтез системы управления двигателем постоянного тока с регуляторами класса входвыход в программной среде Mexbios.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 30.11.2023
Просмотров: 73
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
М
 инистерство науки и высшего образования Российской Федерации
инистерство науки и высшего образования Российской ФедерацииФедеральное государственное автономное образовательное учреждение
высшего образования
«Пермский национальный исследовательский политехнический университет»
Кафедра микропроцессорных средств автоматизации
Синтез системы управления двигателем постоянного тока с регуляторами класса «вход-выход» в программной среде MexBIOS
Методическое руководство к выполнению
Лабораторной работы № 2 по учебной дисциплине “Системы управления электроприводом”
Составил: д.т.н., профессор кафедры МСА Казанцев В.П.
Пермь, 2022 г.
Цели работы:
Синтез системы управления двигателем постоянного тока (ДПТ) с регуляторами класса «вход-выход» по принципу подчиненного регулирования в программной среде MexBIOS.
Краткие теоретические сведения и описание работы:
1. Расчет параметров двигателя
Математическое описание двигателя постоянного тока с постоянным возбуждением можно представить в следующем виде:
 , (1)
, (1)где EТП – ЭДС источника питания; i, M, ω– координаты следящего электропривода: ток, электромагнитный момент и скорость соответственно; RЯЦ – сопротивление якорной цепи; LЯЦ – индуктивность якорной цепи; С – постоянная двигателя; МС – момент на валу двигателя; J – момент инерции двигателя.
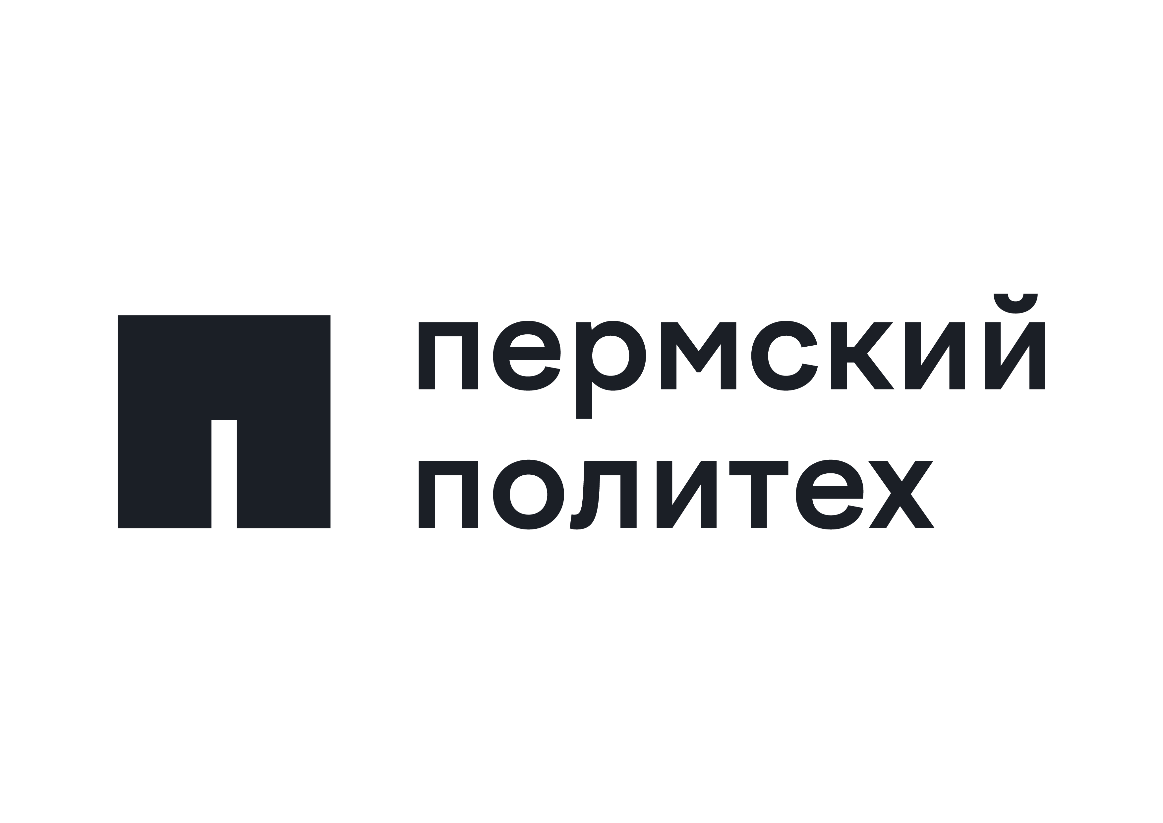
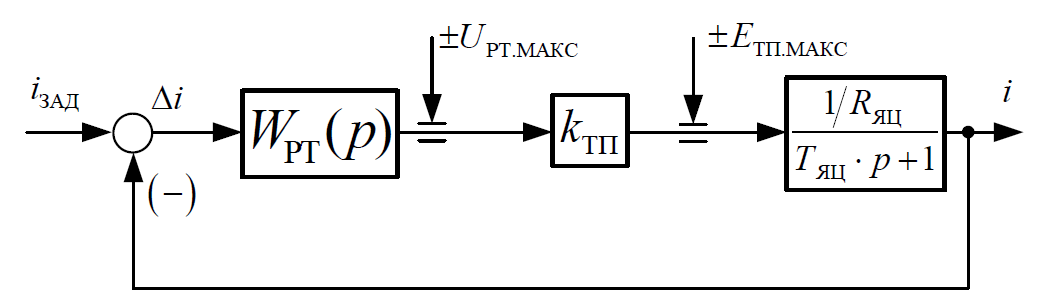
На рисунке 1 представлена схема, соответствующая математическому описанию (1).
Рисунок 1 – Структурная схема двигателя постоянного тока с питанием от транзисторного преобразователя
На рисунке 1 обозначены:
 – передаточная функция транзисторного преобразователя с широтно-импульсной модуляцией (ШИМ);
– передаточная функция транзисторного преобразователя с широтно-импульсной модуляцией (ШИМ); – передаточная функция якорной цепи.
– передаточная функция якорной цепи.Для настройки системы управления необходимо знать параметры двигателя. Часть параметров дана в таблице с вариантами (таблица 1), другие необходимо рассчитать самостоятельно по представленным ниже формулам.
Таблица 1. Параметры ДПТ для заданных вариантов
| № вар. | Параметры ДПТ | |||||||||||
| Uн (В) | Iн (А) | RЯЦ (Ом) | LЯЦ (Гн) | J (кг⋅м2) | B | н (1/с) | Ттп (с) | kтп (о.е.) | zp | TS | Brake | |
| 1 | 52 | 15 | 0,5 | 0,00053 | 0,00022 | 0,001 | 125,6 | 0,0001 | 51 | 1 | 0,00001 | 0 |
| 2 | 52 | 15 | 0,5 | 0,00053 | 0,00022 | 0,001 | 125,6 | 0,0001 | 51 | 1 | 0,00001 | 0 |
| 3 | 110 | 75 | 0,1 | 0,00011 | 0,00111 | 0,001 | 125,6 | 0,0001 | 100 | 1 | 0,00001 | 0 |
| 4 | 110 | 75 | 0,1 | 0,00011 | 0,00111 | 0,001 | 210 | 0,0001 | 100 | 1 | 0,00001 | 0 |
| 5 | 220 | 50 | 0,3 | 0,00032 | 0,00074 | 0,01 | 314 | 0,0002 | 210 | 1 | 0,00001 | 0 |
| 6 | 220 | 50 | 0,4 | 0,00042 | 0,00074 | 0,01 | 210 | 0,0002 | 210 | 1 | 0,00001 | 0 |
| 7 | 440 | 200 | 0,1 | 0,00011 | 0,00296 | 0,01 | 314 | 0,0002 | 430 | 1 | 0,00001 | 0 |
| 8 | 440 | 200 | 0,1 | 0,00011 | 0,00296 | 0,01 | 210 | 0,0002 | 430 | 1 | 0,00001 | 0 |
| 9 | 600 | 1000 | 0,04 | 0,00004 | 0,01481 | 0,01 | 157 | 0,0002 | 590 | 1 | 0,00001 | 0 |
| 10 | 600 | 1000 | 0,04 | 0,00004 | 0,01481 | 0,01 | 157 | 0,0002 | 590 | 1 | 0,00001 | 0 |
| 11 | 440 | 100 | 0,25 | 0,00027 | 0,00148 | 0,01 | 210 | 0,0002 | 430 | 1 | 0,00001 | 0 |
| 12 | 440 | 100 | 0,25 | 0,00027 | 0,00148 | 0,01 | 210 | 0,0002 | 430 | 1 | 0,00001 | 0 |
| 13 | 220 | 20 | 1,5 | 0,0016 | 0,00030 | 0,001 | 314 | 0,0001 | 210 | 1 | 0,00001 | 0 |
| 14 | 220 | 20 | 1,5 | 0,0016 | 0,00030 | 0,001 | 210 | 0,0001 | 210 | 1 | 0,00001 | 0 |
| 15 | 440 | 160 | 0,3 | 0,00032 | 0,00237 | 0,01 | 314 | 0,0002 | 430 | 1 | 0,00001 | 0 |
| 16 | 220 | 10 | 1,0 | 0,0011 | 0,00015 | 0,001 | 314 | 0,0001 | 210 | 1 | 0,00001 | 0 |
| 17 | 220 | 10 | 1,0 | 0,0011 | 0,00015 | 0,001 | 314 | 0,0001 | 210 | 1 | 0,00001 | 0 |
 . (3)
. (3)2. Настройка контура тока
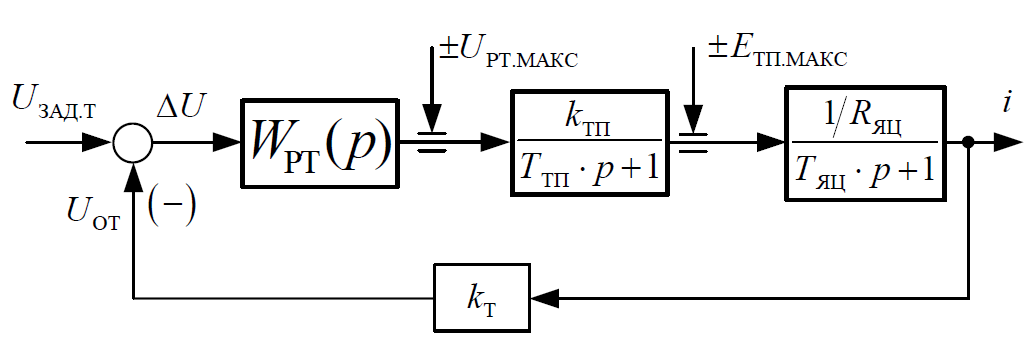
Структурная схема контура тока представлена на рисунке 2 (а). Здесь инерционность преобразователя учтена за счет введения апериодического звена, но не учтена его дискретность и квантование по времени. Обратная связь представлена в общем виде коэффициентом kT.
Данный контур теоретически можно настроить по методике Кесслера на модальный оптимум, обеспечивая предельное быстродействие при перерегулировании на уровне 4,3%, приняв за малую некомпенсируемую постоянную времени величину
 . (4)
. (4)Также при настройке системы необходимо сделать следующее допущение – обратную связь считаем безынерционной и настроенной на коэффициент kT = 1, требуемая полоса пропускания в контуре тока fУ.Т. = 200 Гц.
(а)
(б)
Рисунок 2 – Структурная схема контура тока
Контур на рисунке 2 (б) можно настроить на апериодический процесс.
Передаточная функция объекта управления контура тока:
 , (5)
, (5)желаемые передаточные функции замкнутого и разомкнутого контуров тока:
 , (6)
, (6) , (7)
, (7)где TT = 1/ωУ.Т. = 1/(2π⋅200) = 0,8⋅10-3 – желаемая постоянная времени контура тока (данная величина одинакова для всех вариантов).
Определяем тогда передаточную функцию регулятора тока:
 . (8)
. (8)Передаточная функция соответствует ПИ-регулятору:
 . (9)
. (9)Определяем параметры регулятора:
 . (11)
. (11)Для дискретной модели регулятора необходимо дополнительно выполнить расчет коэффициента интегральной составляющей:
 , (12)
, (12)где dt = TS – шаг расчета системы управления по времени.
3. Настройка контура скорости
Настройку контура скорости произведем на симметричный оптимум.
Структурная схема контура скорости с ПИ-регулятором скорости и замкнутым контуром тока (6), оптимизированным выше, показана на рисунке 3.
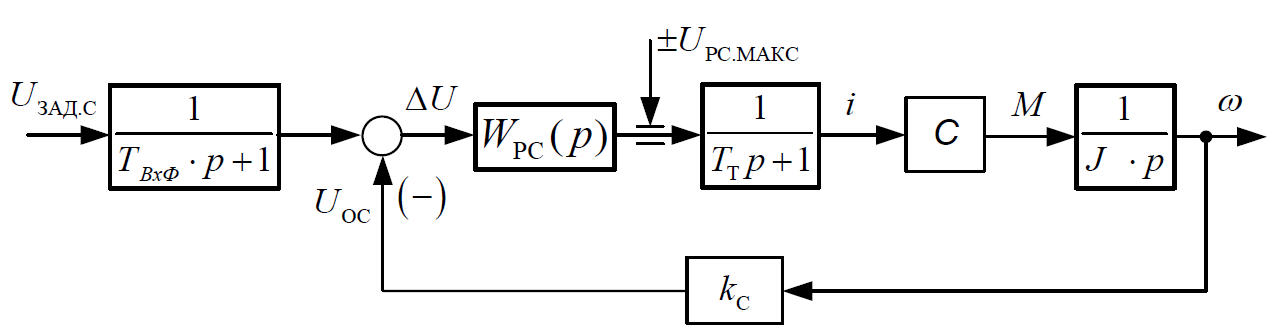
Рисунок 3 – Структурная схема контура скорости
Малая некомпенсируемая постоянная времени контура скорости равна постоянной времени внутреннего контура тока:
Коэффициент обратной связи по скорости:
 , (14)
, (14)где UЗС.МАКС = 1 о.е. – максимальное задание на скорость.
Коэффициент усиления ПИ-регулятора скорости находим следующим образом:
 . (15)
. (15)Постоянную времени регулятора находим следующим образом:
Интегральную составляющую ПИ-регулятора рассчитываем по формуле:
 , (17)
, (17)где dt = TS – шаг расчета системы управления по времени.
Порядок выполнения работы и методические указания:
1. Получить от преподавателя задание на выполнение лабораторной работы, включающее № варианта параметров ДПТ.
2. Рассчитать параметры двигателя, коэффициенты ПИ-регулятора для контура тока и контура скорости (формулы для расчета представлены в разделе «Краткие теоретические сведения»).
3. Создать проект Models (рисунок 4).
Рисунок 4 – Создание нового проекта
4. Сохраняем под именем DCM_model (рисунок 5).
Рисунок 5 – Сохранение проекта
5. Создадим структуру объекта управления в библиотеке Models. Для этого переименуйте MAIN на DCM_model – формула будет содержать модель объекта регулирования – ДПТ и ПЧ.
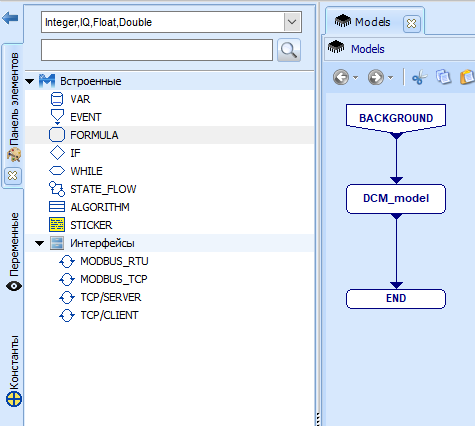
Рисунок 6 – Структура модели объекта управления в библиотеке Models
6. Параметры двигателя добавляем во вкладку «Константы». Для добавления новой константы во вкладке «Константы» необходимо нажать кнопку «Добавить». Создайте константы согласно рисунку 7, числовые значения для констант необходимо взять из варианта, либо рассчитать по предоставленным в теоретической сводке формулам.
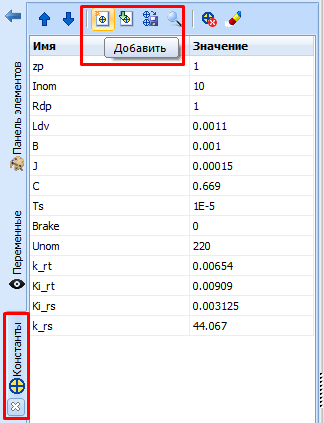
Рисунок 7 – Список используемых констант
7. Перейдите в формулу DCM_model. В панели элементов выберите следующие блоки и соедините, как показано на рисунке 8.
| Название блока | Группа библиотеки | Графическое обозначение | Настройки |
| dMotor | Models\ Модели двигателей |  | In = Inom Rs = Rdp Ls = Ldv Zp = zp B = B J = J C = C остальные параметры задать = 0. |
| dDC_MOTOR | Models\ Модели двигателей | 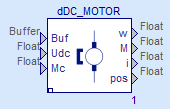 | SampleTime = Ts Brake = Brake |
| LABEL | Встроенные\ Вывод данных |  | Формат: Float |
| EDIT | Встроенные\ Ввод данных |  | Формат: Float Value = 24 |