Файл: Синтез системы управления двигателем постоянного тока с регуляторами класса входвыход в программной среде Mexbios.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 30.11.2023
Просмотров: 76
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
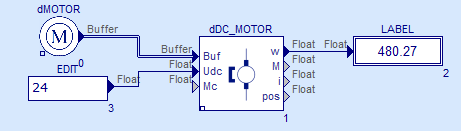
Рисунок 8 – Схема соединения
После чего запустите моделирование нажав на кнопку «Пуск», как показано на рисунке 9. Время моделирования установите равным inf.
После запуска моделирования в блоке EDIT задайте различные значения постоянного напряжения (например, 24) и посмотрите, как изменяется скорость двигателя.

Рисунок 9 – Запуск моделирования
8. В библиотеке Models добавить элемент EVENT. Необходимо задать следующие параметры части блока EVENT, отвечающей за начало алгоритма – Источник: программное прерывание, Условие: равно, Значение 1: отсутствует, Значение 2: отсутствует, формат Integer.
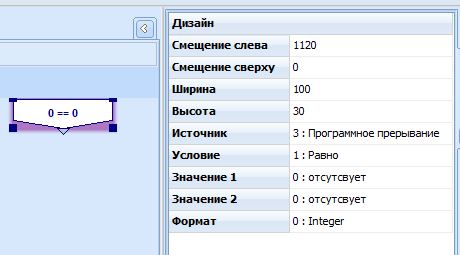
Рисунок 10 – Настройка блока начала алгоритма
9. В библиотеке Models добавить две переменные VAR и задать первой переменной параметр Имя: Udc_pu, Формат: Float; второй переменной Имя: Uref, Формат: Float.
Далее необходимо добавить три формулы. Первой присвоить имя: manual_voltage_setter, второй: voltage_genaration, третьей: GUI. Соединить блоки, как показано на рисунке 11.
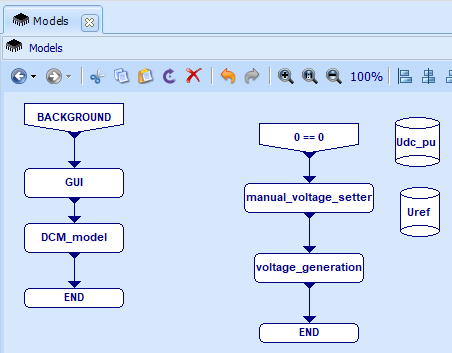
Рисунок 11 – Структура модели в библиотеке Models
10. В формуле voltage_generation необходимо собрать схему, изображенную на рисунке 12. Данная формула будет выполнять функцию генерирования напряжения, подводимого к двигателю.
| Название блока | Группа библиотеки | Графическое обозначение | Настройки |
| IN | Встроенные |  | Формат: Float Переменная = Udc_pu |
| TP_OUT | Встроенные | | Имя = pu_Udc Тег = pu_Udc |
| OUT | Встроенные |  | Формат: Float Переменная = Uref |
При использовании блока TP_OUT важно, чтобы параметры Имя и Тег совпадали. Не выполнение этой рекомендации далее внесет путаницу в собираемые схемы.
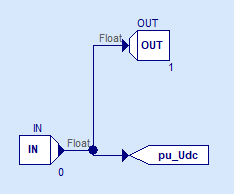
Рисунок 12 – Содержимое формулы voltage_generation
11. В формуле GUI будет размещен виртуальный пульт управления. Основные функция графического интерфейса – это задание параметров, переключение режима работы системы управления и отображение текущих значений основных координат двигателя.
Необходимо собрать пульт управления, соответствующий схеме, изображённой на рисунке 13.
| Название блока | Группа библиотеки | Графическое обозначение | Настройки |
| STICKER | Встроенные |  | Заголовок: Имитация Текст: Напряжение Udc, В |
| STICKER | Встроенные | | Заголовок: Напряжение Текст: в о.е. |
| EDIT | Встроенные\ Ввод данных |  | Формат: Float Value = Unom |
| EDIT | Встроенные\ Ввод данных | | Формат: Float Value = 0,1 |
| TP_OUT | Встроенные | | Имя = m_dc_bus Тег = m_dc_bus |
| TP_OUT | Встроенные | | Имя = ref_voltage Тег = ref_voltage |
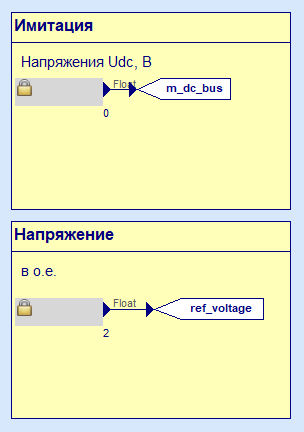
Рисунок 13 – Содержимое формулы GUI
Напряжение будет задаваться в относительных единицах, поэтому необходимо указывать значение в пределах от 0 до 1. Это значение будет умножаться на Unom и подводиться к двигателю.
Далее необходимо создать ссылки (TP_IN) на созданные ранее блоки TP_OUT. Для этого необходимо нажать правой кнопкой мыши на нужный блок TP_OUT и в всплывающем окне выбрать пункт «создать ссылку» (рисунок 14).
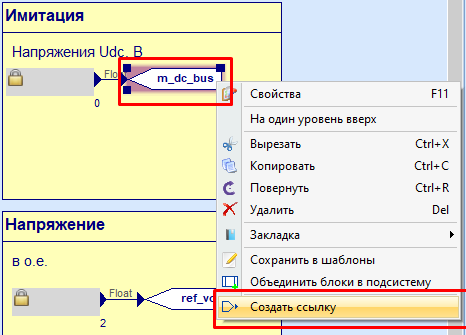
Рисунок 14 – Создание ссылки на тег
Создайте ссылки на ref_voltage и m_dc_bus. С помощью сочетания клавиш Ctrl+X вырежьте созданную ссылку на ref_voltage и перейдите в формулу manual_voltage_setter. В этой формуле вставьте ссылку с помощью сочетания клавиш Ctrl+V.
12. В формуле manual_voltage_setter необходимо собрать схему, изображенную на рисунке 15. Данная формула будет выполнять функцию ручного управления напряжением.
| Название блока | Группа библиотеки | Графическое обозначение | Настройки |
| DBG_CNT | Models \ Расширенная логика |  | Имя = DGB_CNT_V Cnt = 0 |
| OUT | Встроенные |  | Формат: Float Переменная = Udc_pu |
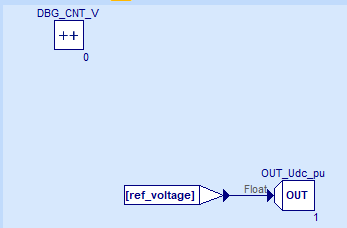
Рисунок 15 – Содержание формулы manual_voltage_setter
Блок DBG_CNT выполняет функцию счетчика. Если выделить блок и нажать клавишу F4, то он добавится в список «Переменные» (этот список можно открыть на правой боковой панели программы между списками «Панель элементов» и «Константы». С помощью блока DBG_CNT можно отслеживать, сколько раз алгоритм заходит в формулу и заходит ли вообще.
13. На следующем этапе необходимо вернуться в формулу DCM_MODEL и доработать модель двигателя. Перед этим необходимо открыть формулу GUI и вырезать ссылку с тегом m_dc_bus. Вставить ссылку нужно будет в формулу DCM_MODEL. Также необходимо открыть формулу voltage_generation, создать ссылку на тег pu_Udc, вырезать его и вставить в формулу DCM_MODEL.
Далее необходимо собрать схему, соответствующую рисунку 16.
| Название блока | Группа библиотеки | Графическое обозначение | Настройки |
| fMPY | Models \ Математика |  | |
| TP_OUT | Встроенные | | Имя = wr Тег = wr |
| TP_OUT | Встроенные | | Имя = ia Тег = ia |
| LABEL | Встроенные\ Вывод данных |  | Формат: Float |
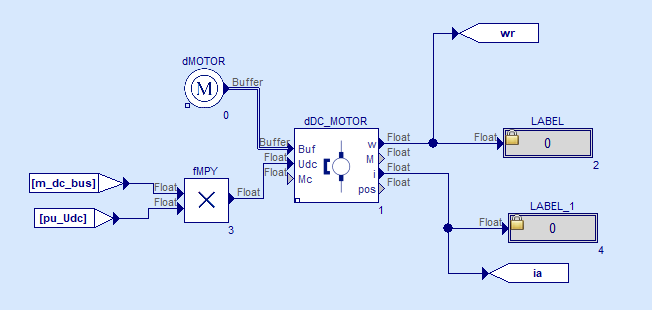
Рисунок 16 – Содержимое формулы DCM_MODEL
14. Далее необходимо вернуться в формулу GUI, предварительно создав и вырезав в формуле DCM_MODEL ссылки на теги wr и ia. Данные ссылки необходимо вставить в GUI, и собрать схему, изображенную на рисунке 17.
| Название блока | Группа библиотеки | Графическое обозначение | Настройки |
| STICKER | Встроенные |  | Заголовок: Параметры двигателя Текст: Скорость, рад\с Ток якоря, А |
| LABEL | Встроенные\ Вывод данных | | Формат: Float |
| LABEL | Встроенные\ Вывод данных | | Формат: Float |
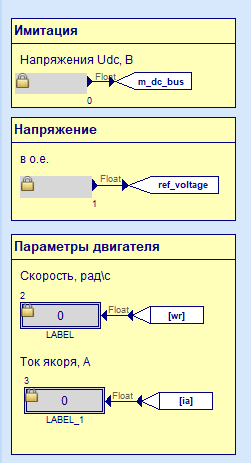
Рисунок 17 – Содержимое формулы GUI
После того как все предшествующие пункты будут выполнены необходимо будет запустить моделирование (время задать равным inf). Во время моделирования попробовать поменять значения задаваемого напряжения в относительных единицах и посмотреть, как изменяются параметры двигателя (рисунок 18).
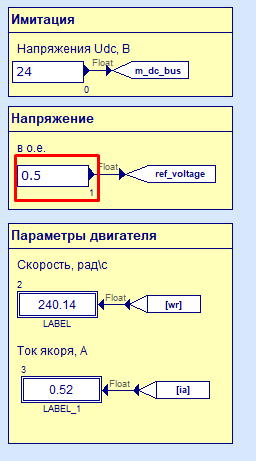
Рисунок 18 – Моделирование собранной системы управления напряжением двигателя
15. Далее необходимо перейти к созданию системы управления скоростью электродвигателя постоянного тока. Для этого необходимо перейти в библиотеку Models, и добавить переменную VAR, задав следующие параметры: Имя – CS_mode, Формат – Integer. Далее необходимо добавить два блока ветвления IF. Первому блоку IF задать параметры: Условие – Равно, Значение 1 – CS_mode, Значение 2 – Константа (числовое значение константы задать равным 0), Формат – Integer. Второму блоку IF задать параметры: Условие – Равно, Значение 1 – CS_mode, Значение 2 – Константа (числовое значение константы задать равным 1), Формат – Integer. Следующим шагом будет добавление двух формул (блок FORMULA). Первому блоку задать имя Speed_loop, а второму блоку Current_loop. Данные формулы будут соответствовать контурам скорости и тока.
Далее необходимо собрать схему, изображенную на рисунке 19. Ветвление необходимо для того, чтобы реализовать возможность переключения между режимами управления двигателем (управление напряжением и управление скоростью).
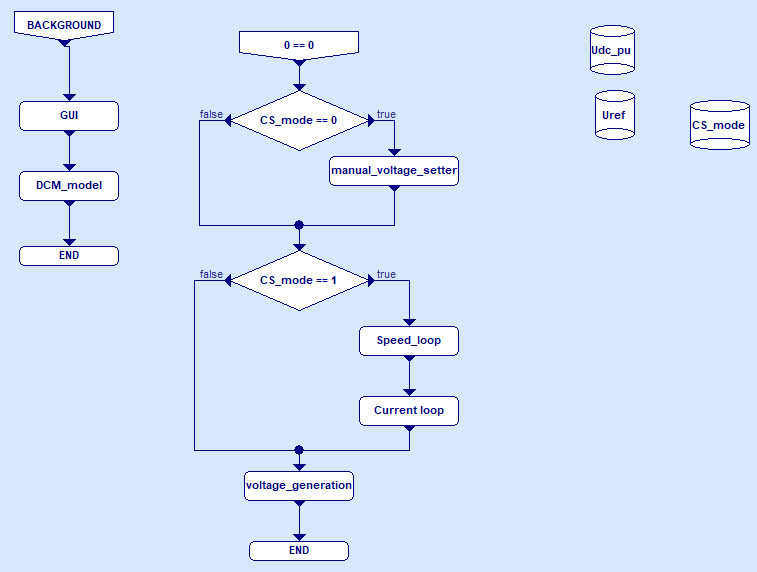
Рисунок 19 – Структура модели в библиотеке Models
16. Следующим этапом будет создание пульта переключения режимов работы системы управления в формуле GUI, а также пульта управления скоростью.
| Название блока | Группа библиотеки | Графическое обозначение | Настройки |
| STICKER | Встроенные | | Заголовок: Способ управления |
| RADIO_IN | Встроенные \ Ввод данных |  | Элементы: 0 : Управление напряжением 1 : Управление скоростью Формат: Integer |
| TP_OUT | Встроенные | | Имя = CS_MODE Тег = CS_MODE |
| OUT | Встроенные | | Формат: Integer Переменная = CS_mode |
| Const | Встроенные |  | Формат: Integer Value = 1 |
| D_MUX | Models \ Расширенная логика |  | NumOut = 2 |
| TP_OUT | Встроенные | | Имя = M0 Тег = M0 |
| TP_OUT | Встроенные | | Имя = M1 Тег = M1 |
| STICKER | Встроенные | | Заголовок: Управление скоростью |
| EDIT | Встроенные\ Ввод данных | | Формат: Float Value = 0 |
| TP_OUT | Встроенные | | Имя = ref_speed Тег = ref_speed |
| BULB | Встроенные\ Вывод данных |  | Формат: Integer |
| BULB | Встроенные\ Вывод данных | | Формат: Integer |