Файл: Синтез системы управления двигателем постоянного тока с регуляторами класса входвыход в программной среде Mexbios.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 30.11.2023
Просмотров: 74
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Далее необходимо создать ссылки на теги CS_MODE, M0 и M1, и соединить блоки как показано на рисунке 20.
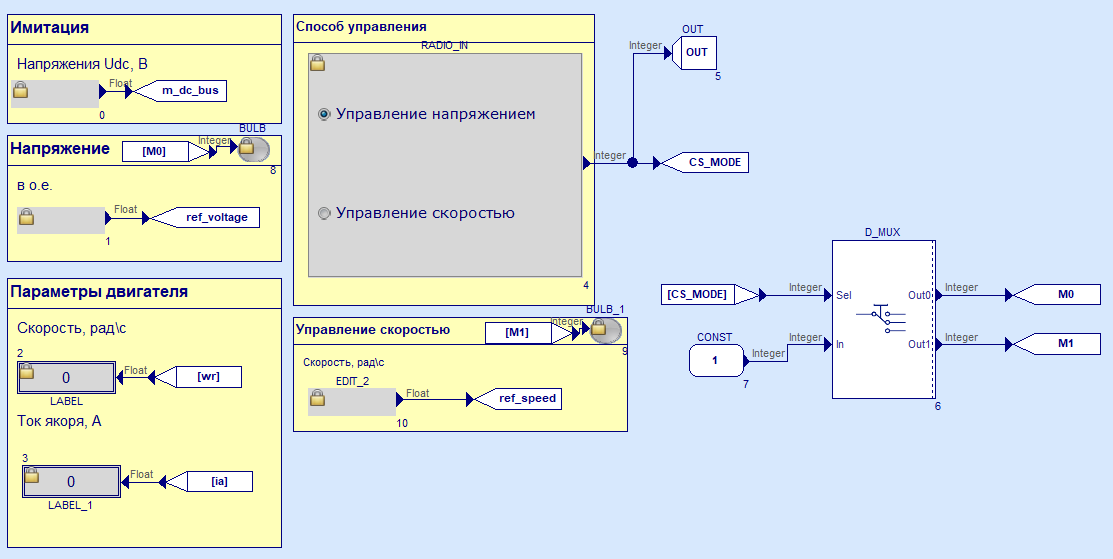
Рисунок 20 – Содержимое формулы GUI
17. Следующим этапом будет сборка контура тока. Первым делом необходимо добавить в формулу ссылки на нужные теги. В формулу Current_loop из формулы GUI необходимо добавить ссылку на тег CS_MODE, a из формулы DCM_MODEL ссылку на тег ia. Следующим этапом будет добавление блоков и их соединение согласно рисунку 21.
| Название блока | Группа библиотеки | Графическое обозначение | Настройки |
| DBG_CNT | Models \ Расширенная логика |  | Имя = DGB_CNT_C Cnt = 0 |
| STICKER | Встроенные |  | Заголовок: Способ управления Текст: 0 : Напряжение 1 : Скорость |
| Const | Встроенные |  | Формат: Integer Value = 0 |
| EDIT | Встроенные\ Ввод данных |  | Формат: Float Value = 0 |
| A_MUX | Models \ Расширенная логика |  | NumIn = 3 |
| fPID | Models \ Регуляторы и фильтры |  | Kp = k_rt Ki = Ki_rt Kc = Ki_rt Min = -0,99 Max = 0,99 |
| LABEL | Встроенные\ Вывод данных |  | Формат: Float |
| OUT | Встроенные |  | Формат: Float Переменная = Udc_pu |
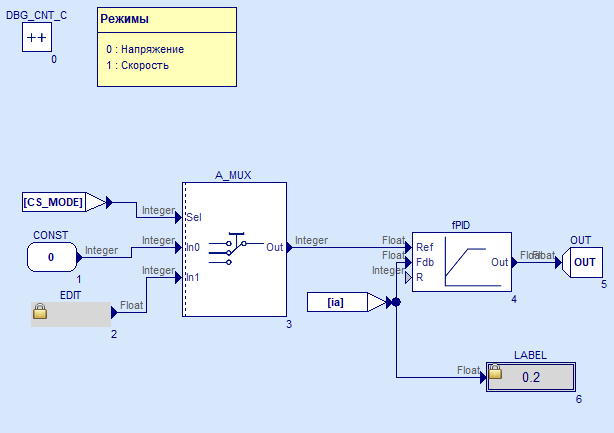
Рисунок 21 – Содержимое формулы Current_loop
18. Следующий этап – это переход к настройке контура скорости. Первым делом необходимо добавить в формулу ссылки на нужные теги. В формулу Speed_loop из формулы GUI необходимо добавить ссылку на тег CS_MODE, a из формулы DCM_MODEL ссылку на тег wr. Следующим этапом будет добавление блоков и их соединение согласно рисунку 22.
| Название блока | Группа библиотеки | Графическое обозначение | Настройки |
| DBG_CNT | Models \ Расширенная логика | | Имя = DGB_CNT_S Cnt = 0 |
| STICKER | Встроенные | | Заголовок: Способ управления Текст: 0 : Напряжение 1 : Скорость |
| Const | Встроенные | | Формат: Integer Value = 0 |
| EDIT | Встроенные\ Ввод данных | | Формат: Float Value = 0 |
| A_MUX | Models \ Расширенная логика |  | NumIn = 3 |
| fPID | Models \ Регуляторы и фильтры |  | Kp = k_rs Ki = Ki_rs Kc = Ki_rs Min = -2,5Inom Max = 2,5Inom |
| LABEL | Встроенные\ Вывод данных | | Формат: Float |
| TP_OUT | Встроенные | | Имя = ref_ia Тег = ref_ia |
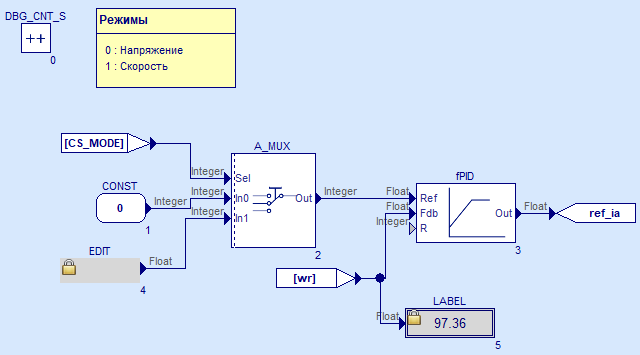
Рисунок 22 – Содержимое формулы Speed_loop
После соединения всех блоков нужно создать ссылку на тег ref_ia, вырезать ее и вставить в формулу Current_loop (рисунок 23).
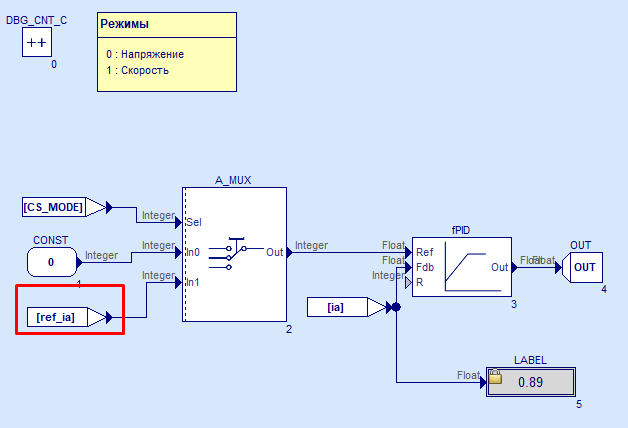
Рисунок 23 – Содержимое формулы Current_loop (замена EDIT на ссылку тега ref_ia)
Далее необходимо проверить правильность работы контура скорости, для этого необходимо перейти в формулу GUI и в блоке RADIO_IN значение Value задать равным 1. После этого вернуться в формулу Speed_loop и запустить моделирование (время задать равным inf). Во время моделирования в блоке EDIT необходимо задать значение (например, 100). Если значение, отображаемое в блоке LABEL, будет совпадать (или будет близко) к заданному значению – значит коэффициенты ПИ-регулятора рассчитаны правильно и контур регулирования тока настроен правильно (рисунок 24). Если значения не совпадают, то настоятельно рекомендуем провести расчеты заново и поискать ошибку в настройках блоков или их соединении. В случае, если ошибок в настройках блоков и расчетах нет, но в системе присутствуют колебания необходимо попробовать самостоятельно подобрать коэффициенты регулятора.
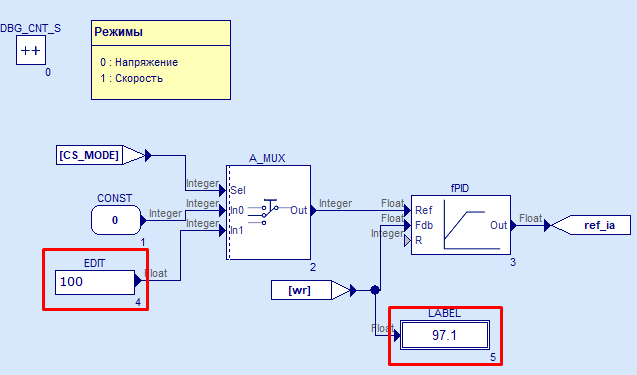
Рисунок 24 – Проверка настройки контура регулирования скорости
19. Если оба контура настроены и работают правильно, необходимо организовать управление скоростью с помощью виртуального пульта. Для этого необходимо перейти в формулу GUI и создать ссылку на тег ref_speed. После чего вырезать эту ссылку, вставить в формулу Speed_loop и подключить как на рисунке 25.
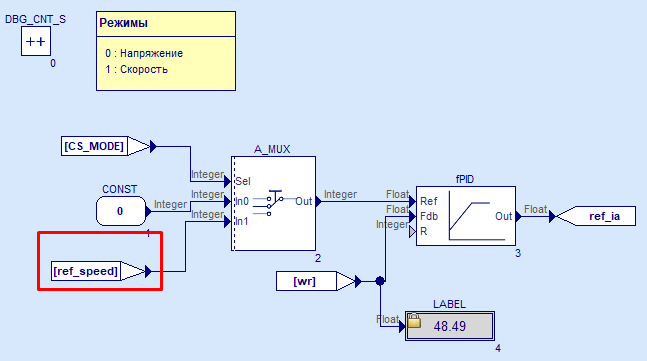
Рисунок 25 – Содержимое формулы Speed_loop (замена EDIT на ссылку тега ref_speed)
Далее необходимо вернуться в формулу GUI (для наглядности можно отключить показ блоков и линий, нажав на кнопку «Показать/скрыть блоки и линии» (рисунок 26) и запустить моделирование.
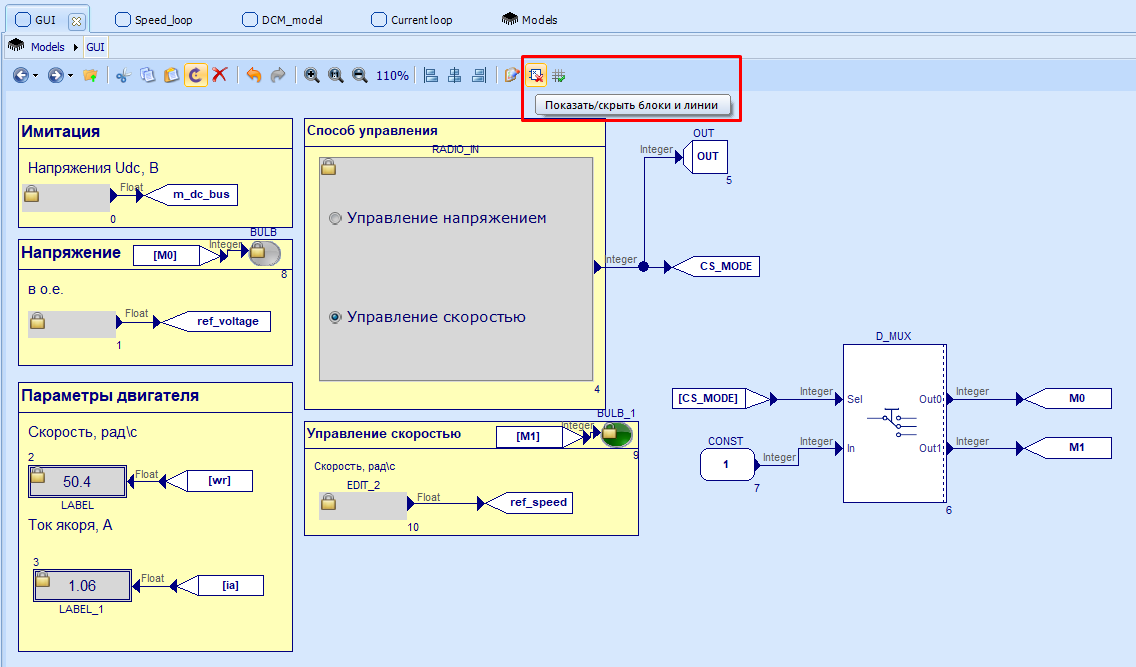
Рисунок 26 – Отключение показа блоков и линий
20. Далее необходимо запустить моделирование (время моделирования задать равным inf) и проверить работоспособность системы управления.
Если система управления работает правильно, то можно перейти к проведению опытов.
Опыт 1: Управление напряжением без нагрузки.
Перед началом опыта необходимо убедиться, что в формуле GUI включен показ блоков и линий. Далее во вкладке «Встроенные» необходимо выбрать блок SCOPE. Если дважды кликнуть левой кнопкой мыши по блоку, то он откроется. В открытом блоке SCOPE на верхней панели открыть вкладку «параметры SCOPE» (изображен молоток). Задать параметры как на рисунке 27.
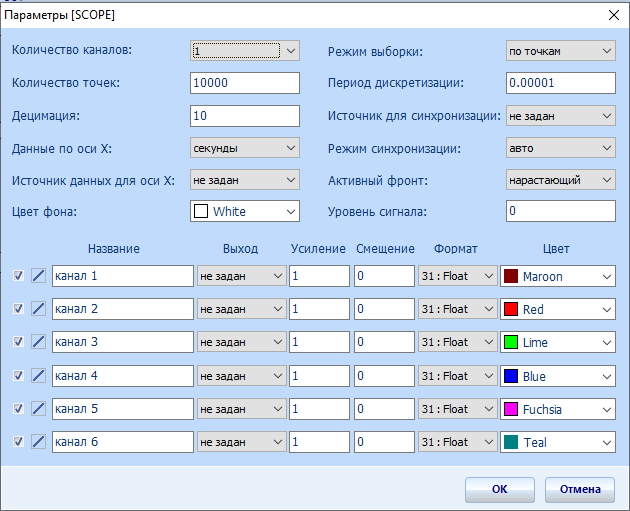
Рисунок 27 – Параметры блока SCOPE
Создать второй блок SCOPE с такими же параметрами и подключить их как на рисунке 28.
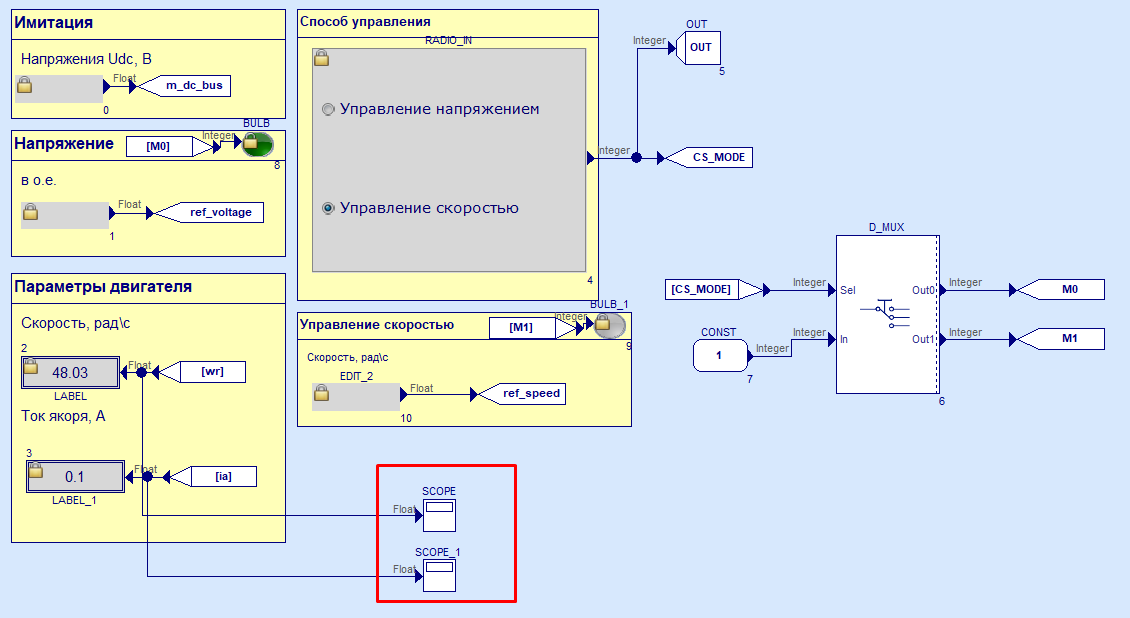
Рисунок 28 – Подключение блоков SCOPE
Соответственно, один из блоков будет показывать скорость, а другой ток.
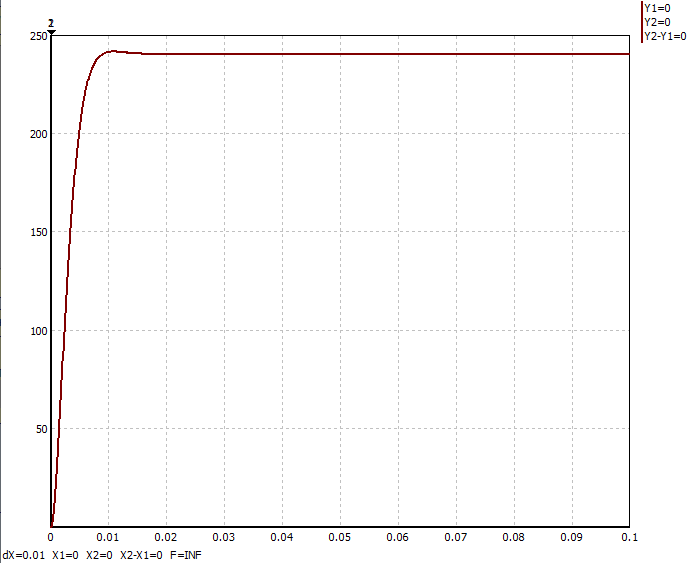
Далее необходимо выбрать блок RADIO_IN, и задать значение параметра Value = 0. После этого перейти к блоку задания напряжения на виртуальном пульте и задать значение 0,5.
Следующим этапом будет запуск моделирования (время моделирования задать равным 0,1).
Полученные графики необходимо сохранить, сделав скриншот или нажав на кнопку сохранения в блоке SCOPE, также полученные графики необходимо добавить в отчет по лабораторной работе.
Пример результата:
(а)
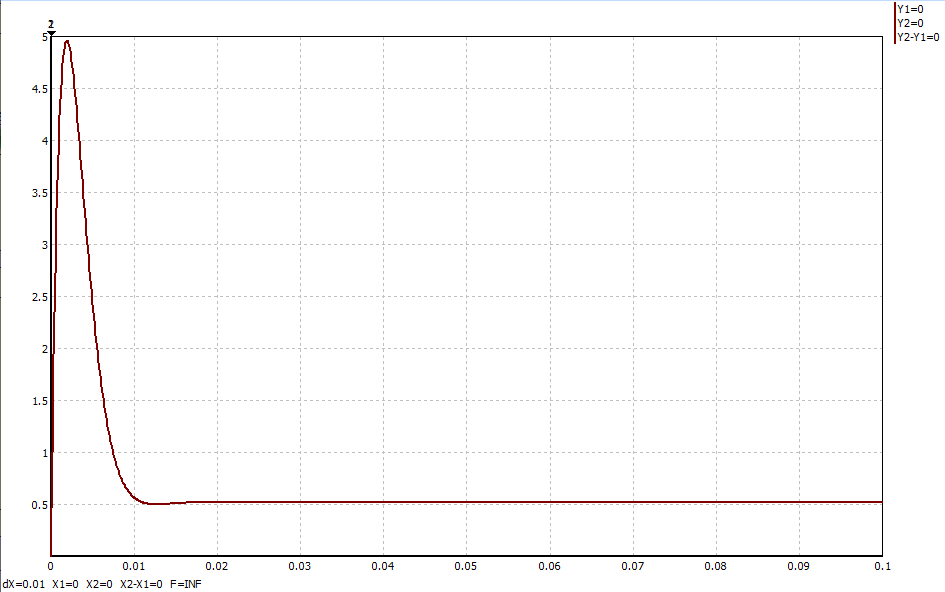
(б)
Рисунок 29 – Пример результата Опыта 1 (а – переходный процесс по скорости, б – переходный процесс по току)
Опыт 2: Управление скоростью без нагрузки.
Необходимо выбрать блок RADIO_IN, и задать значение параметра Value = 1. После этого перейти к блоку задания скорости на виртуальном пульте и задать значение 100.
Следующим этапом будет запуск моделирования (время моделирования задать равным 0,1).
Полученные графики необходимо сохранить, сделав скриншот или нажав на кнопку сохранения в блоке SCOPE, также полученные графики необходимо добавить в отчет по лабораторной работе.