Файл: Синтез системы управления двигателем постоянного тока с регуляторами класса входвыход в программной среде Mexbios.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 30.11.2023
Просмотров: 75
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Пример результата:
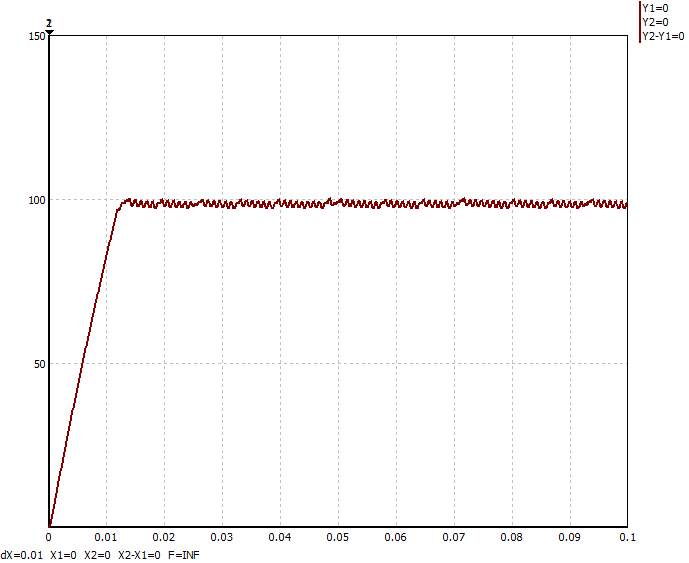
(а)
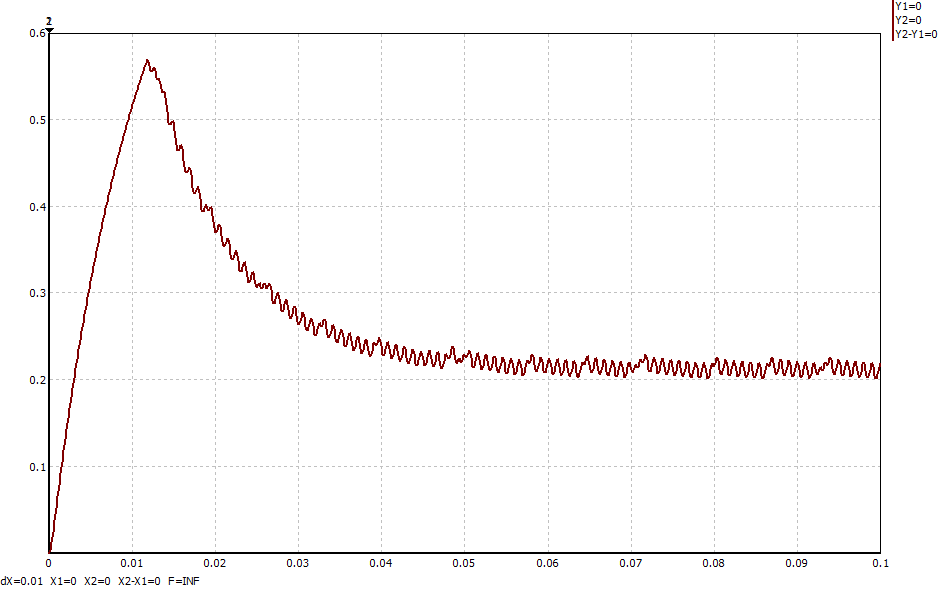
(б)
Рисунок 30 – Пример результата Опыта 2 (а – переходный процесс по скорости, б – переходный процесс по току)
Опыт 3: Управление скоростью с постоянной нагрузкой.
Необходимо выбрать блок RADIO_IN, и задать значение параметра Value = 1. После этого перейти к блоку задания скорости на виртуальном пульте и задать значение 100.
Далее необходимо перейти в формулу DCM_MODEL, добавить константу с параметрами: Формат = Float, Value = 0,5 ⋅ MC = 0,5 ⋅ C ⋅ Iн и подключить как показано на рисунке 31.
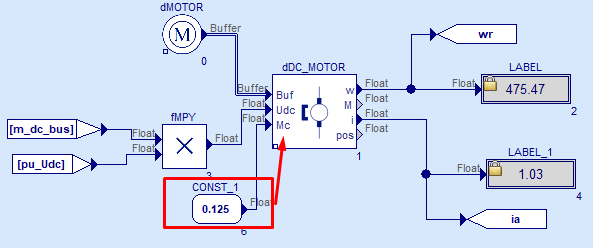
Рисунок 31 – Добавление постоянной нагрузки к двигателю
Следующим этапом будет запуск моделирования (время моделирования задать равным 0,1).
Полученные графики необходимо сохранить, сделав скриншот или нажав на кнопку сохранения в блоке SCOPE, также полученные графики необходимо добавить в отчет по лабораторной работе.
Пример результата:
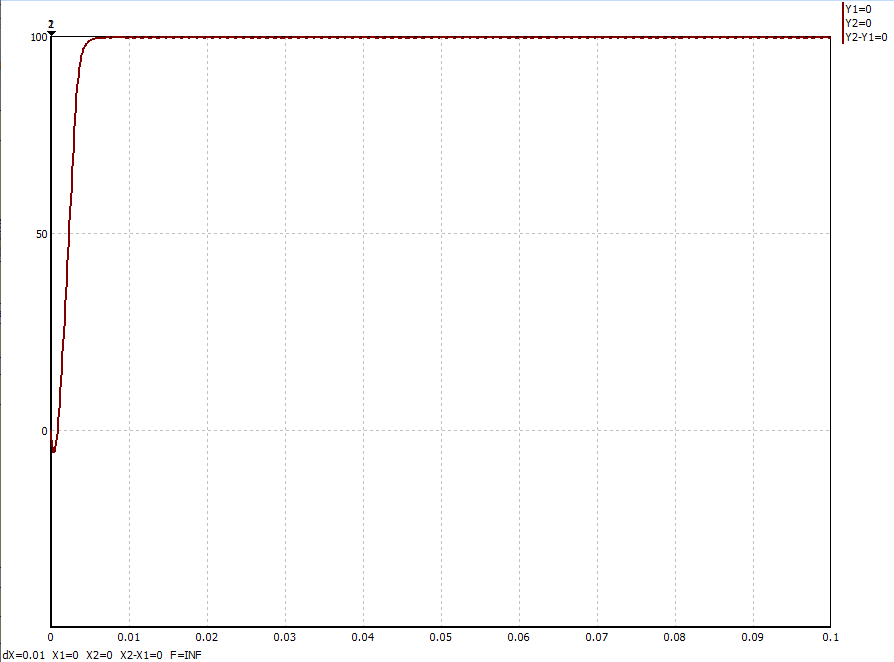
(а)
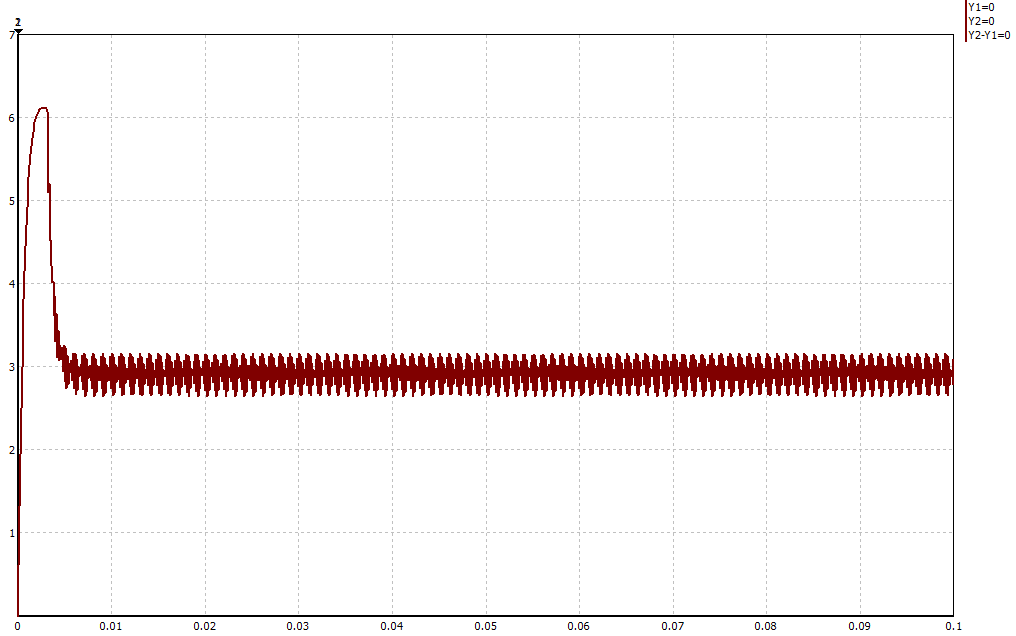
(б)
Рисунок 32 – Пример результата Опыта 3 (а – переходный процесс по скорости, б – переходный процесс по току)
Содержание отчета:
-
Титульный лист, отвечающий требованиям к оформлению лабораторных работ. -
Цели работы. -
Строка параметров ДПТ в соответствие с заданием (таблица 1). -
Результаты расчета параметров ДПТ, синтеза ПИ-регуляторов контура тока и скорости. -
Результаты анализа системы управления ДПТ в виде рисунков-графиков с указанием начальных условий в каждом из 3-х опытов. -
Выводы по результатам исследования.
Контрольные вопросы:
-
Как проводить проверку знаков обратных связей? -
Как производить корректировку коэффициентов ПИ-регулятора? -
Какие методики настройки применяются для каждого контура? -
Объясните схемы контура тока. -
Объясните схему контура скорости. -
Почему контура регулирования рассчитываются на разных частотах? Как это проверить? -
Как добиться максимального быстродействия для контура регулирования? -
В чем различие методики настройки на МО и СО? -
Как ограничивать момент в системе подчиненного регулирования?