Файл: пензенский государственный университет политехнический институт.docx
Добавлен: 30.11.2023
Просмотров: 218
Скачиваний: 4
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
СОДЕРЖАНИЕ
Основные положения, выносимые на защиту:
Эквивалентные преобразования моделей задач линейного программирования
Анализ моделей и алгоритмов решения задач о назначениях
Анализ эквивалентных преобразований моделей задач о назначениях
Модель и алгоритм решения задачи с приоритетными назначениями
По размерности неизвестных можно выделить следующие классы задач:
-
двухиндексные задачи о назначениях; -
многоиндексные задачи о назначениях.
Типичной является постановка двухиндексной задачи о назначениях, решением которой является матрица. Двухиндексные задачи, в свою очередь, можно подразделить на закрытые и открытые. В закрытых моделях количество работ равно количеству исполнителей, в открытых моделях – не равно. Открытые модели часто моделируют наличие конкуренции [5, 52, 53] и легко сводятся к закрытым путем дополнения матрицы затрат нулями до квадратной, что соответствует правилам приведения открытой модели транспортной задачи к закрытой.
Многоиндексные задачи о назначениях возникают при оптимизации работы последовательно-параллельной системы обслуживания [54], в области технического анализа данных при сопровождении объектов в многосенсорных системах [55], при назначении целей для нанесения максимального поражения противнику [56] и др.
К настоящему моменту более изучен подкласс трехиндексных задачи о назначениях. В зависимости от вида ограничений выделяют аксиальные и планарные трехиндексные задачи. Трѐхиндексная аксиальная задача о
назначениях состоит в таком выборе nэлементов кубической матрицы
cijk
порядка n(по одному в каждом сечении), чтобы сумма выбранных элементов была минимальна. В классической трѐхиндексной планарной
задаче о назначениях требуется выбрать n2
элементов указанной матрицы
так, чтобы в каждом еѐ сечении было выбрано ровно nэлементов и при этом сумма выбранных элементов минимальна [57].
И аксиальные и планарные трехиндексные задачи являются NP- трудными. Исследованы свойства многогранника ограничений этих задач, ставшие основой для разработки алгоритмов локального поиска и частичного перебора типа метода ветвей и границ [10, 58, 59, 60]. Известны эвристические алгоритмы решения [61, 62, 63], многие из которых являются модификациями
точных методов, примененных как приближенные. В [64, 65] представлен асимптотически точный подход к построению алгоритмов решения аксиальных многоиндексных задач большой размерности на случайных входах. В [66] предложен адаптивный алгоритм решения трѐхиндексной аксиальной задачи о назначениях, основанный на переходе к задачи в вероятностной постановке. В [67] описан асимптотически точный алгоритм решения модифицированной трѐхиндексной планарной задачи о назначениях. В [68] рассмотрена многокритериальная трехиндексная планарная задача о назначениях, для которой предложен и обоснован полиномиальный алгоритм нахождения асимптотически идеального решения, векторная оценка которого стремится (в смысле относительной погрешности) к идеальной точке.
Таким образом, многообразие математических моделей задач о назначениях, обусловленное их прикладной направленностью, порождает огромное число алгоритмов их решения. Активно исследуются новые постановки задачи, развиваются точные и приближенные алгоритмы их решения, выделяются полиномиально разрешимые случаи.
- 1 2 3 4 5 6 7 8 9 ... 21
Анализ эквивалентных преобразований моделей задач о назначениях
Отдельным направлением исследований является разработка алгоритмов решения, основанных на эквивалентных преобразованиях, специфических для задачи о назначениях. Подобный подход использован при нахождении оптимального решения задачи с целевой функцией на
максимум [7, 10, 30], открытой задачи [5, 48, 53], задачи матрицей затрат, на элементы которой не накладывается условие неотрицательности [69], задачи с запретами на отдельные назначения [7, 45, 48]. Анализ этих задач позволяет сформулировать эквивалентные преобразования, специфические для задачи о назначениях, а также построить обобщенные линейные задачи, модели которых эквивалентны простейшей линейной модели.
Рассмотрим задачу о назначениях, целевая функция которой стремится к максимуму. Пусть математическая модель задачи имеет вид:
| nn f(X) cijxij max, i1 j1 | (5) |
| n xij 1, j 1, n, i1 | (6) |
| n xij 1, i 1, n, j1 | (7) |
| xij{0,1}, i, j 1, n. | (8) |
Эквивалентное преобразование направления целевой функции формулируется так:
-
в каждой строке матрицы С найти наибольший элемент
maxi max cij,
j
j 1, n;
-
перейти к матрице затрат Q , построенной по правилу:
qij
maxi cij,
i1, n,
j 1, n.
Результатом применения данного преобразования является переход к модели вида:
| nn (X) qijxij min, i1 j1 n | (9) |
| xij 1, j 1, n, i1 n | (10) |
| xij 1, i 1, n, | (11) |
j1
xij{0,1}, i, j 1, n. (12)
Модели (5) – (8) и (9) – (12) эквивалентны друг другу, при этом модель
(9) – (12) является простейшей линейной. Отсюда можно сформулировать алгоритм решения задачи о назначениях (5) – (8).
-
Применить к модели (5) – (8) эквивалентное преобразование направления целевой функции. Результатом является получение эквивалентной модели (9) – (10). -
Решить задачу, описываемую соотношениями (9) – (10), венгерским методом или методом Мака.
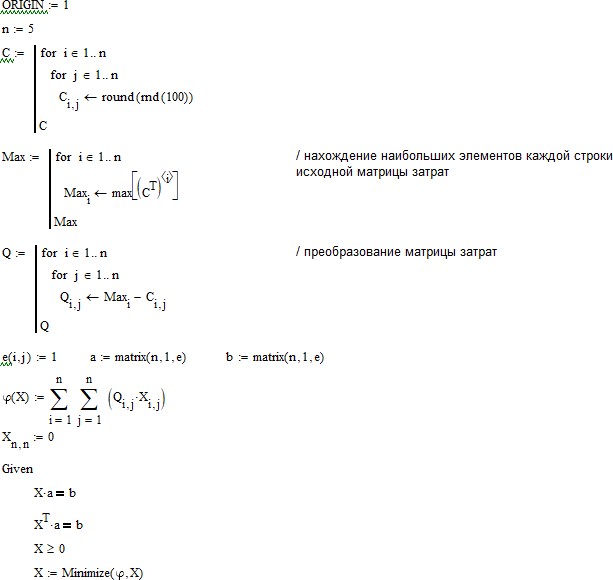
Средствами математического пакета «Mathcad» разработана программа поиска решения задачи о назначениях с целевой функцией на максимум (листинг 2).
Листинг 2 – Поиск решения задачи о назначениях с целевой функцией на максимум
С помощью предложенного алгоритма найдено оптимальное решение задачи о назначениях.
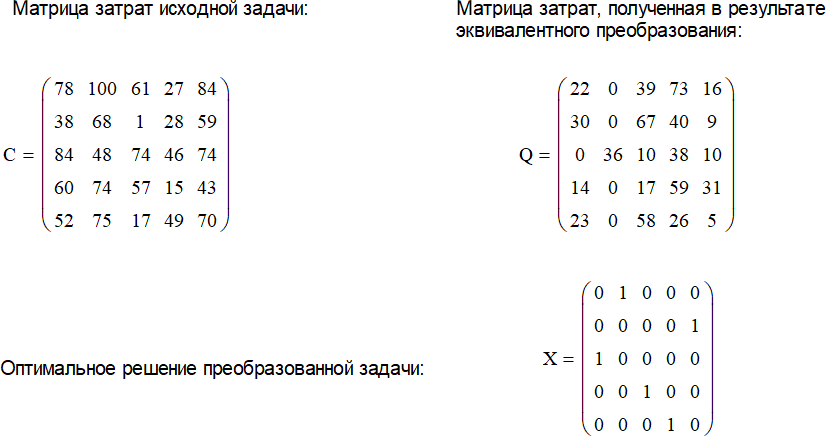
Рисунок 3 – Оптимальное решение задачи о назначениях на максимум
Найденное решение совпадает с решением задачи (5) – (8) симплекс- методом, оптимальные значения целевых функций также совпадают (рисунок 4).
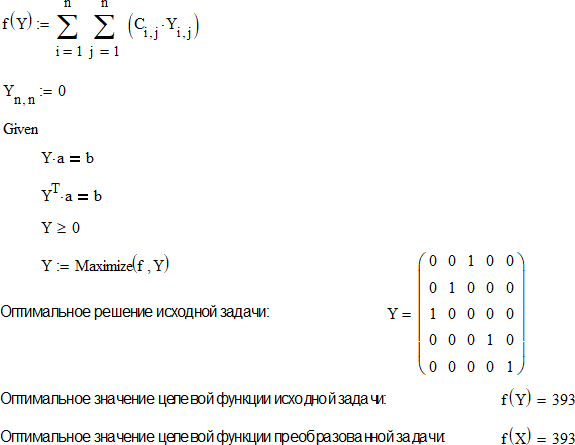
Рисунок 4 – Решение исходной задачи
Рассмотрим открытую задачу о назначениях. Такая задача
предполагает, что матрица затрат
С (сij)mn
не является квадратной, т.е.
m n. Для определенности положим m n, что содержательно описывает
| mn f(X) cijxij min, i1 j1 | (13) |
| m xij 1, j 1, n, i1 | (14) |
| n xij 1 , i 1, m, j1 | (15) |
| ij{0,1}, i 1, m, j 1, n. | (16) |
наличие конкуренции. Тогда математическая модель открытой задачи о назначениях имеет следующий вид:
x
Знак неравенства во втором ограничении обусловлен тем, что в условиях конкуренции работа будет найдена не для всех исполнителей.
Эквивалентное преобразование прямоугольной матрицы затрат в квадратную соответствует правилам приведения открытой модели транспортной задачи, частным случаем которой является задача о назначениях, к закрытой модели и формулируется так:
-
определить порядок матрицы затрат С в закрытой модели
p max{m, n};
-
перейти к матрице затрат Q (qij) p p, построенной по правилу:
cij, i 1, m, j 1, n;