Файл: Научноисследовательская работа по дисциплине Механика деформируемого твёрдого тела.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 30.11.2023
Просмотров: 52
Скачиваний: 3
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Процесс, при котором возникают необратимые деформации, называют активным нагружением, а процесс, сопровождающейся только упругим деформированием – пассивным нагружением, или – разгрузкой. Процесс, при котором траектория нагружения, начиная с некоторой точки, идет вдоль поверхности нагружения, построенной для этой точки, например B1B1', является пограничным между активным и пассивным, и его называют нейтральным нагружением. Свойства деформирования при нейтральном нагружении определяют как предельные.
Деформацию элемента материала ij часто представляют как сумму упругой (обратимой)
Форма и размеры поверхности нагружения определяются только пластической частью деформации и историей ее изменения. Следовательно, аналитически уравнение текущей предельной поверхности можно представить в виде
где через np условно представлены параметры, зависящие от истории изменения
Следует отметить, что представление общей деформации в виде двух аддитивных составляющих является всего-навсего широко распространенной гипотезой. При случайной или методологической ошибках в выделении пластической составляющей из общей деформации могут возникнуть существенные искажения экспериментального результата (А. Н. Супрун [2]).
2.2. Принцип максимума Мизеса и постулат Друккера. Ассоциированный закон деформирования
Принцип максимума Р. Мизеса формулируется следующим образом (Ю. Н. Работнов [3]). Пусть задано распределение скоростей
, которому соответствует поле напряжений ij. Мощность диссипации
Здесь
Утверждается, что для истинного напряженного состояния мощность диссипации не меньше, чем для любого допустимого состояния
Это условие записывают следующим образом:
Д. Друккером было высказано следующее утверждение: новая необратимая деформация в упруго–пластических телах не может возникнуть самопроизвольно; для ее создания нужно затратить энергию. В дальнейшем это положение было развито в его многочисленных работах (см., например, Д. Друккер [4]), и был назван постулатом устойчивости материала. Согласно мнению самого Д. Друккера [4], постулат устойчивости материала является не законом природы, а средством, позволяющим дать общую классификацию материалов, которая выходит за пределы понятий, охватывающих специальные категории: упругость, пластичность, вязкость и т.д. Для материалов с независящими от времени свойствами критерий устойчивости в малом для произвольного ненулевого нагружения имеет следующий вид:
Критерий устойчивости в малом для произвольного цикла нагрузки и разгрузки имеет вид:
В теории пластичности доказывают (например, В. Д. Клюшников [1]),что если условие (7) выполняется, то поверхность нагружения является выпуклой, а вектор
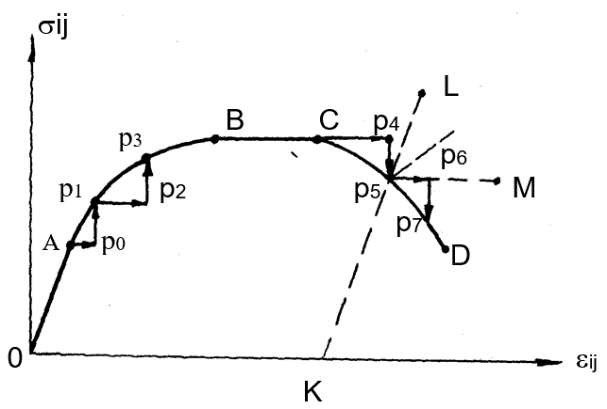
Рис. 3
Предполагая справедливым концепцию поверхности нагружения и неравенство (7) можно заключить, что в регулярной точке поверхности нагружения
 (8)
(8)Здесь
 (9)
(9)Здесь отличны от нуля только те , для которых выполняются условия, указанные в (9).
Как справедливо отмечено в книге [1] В. Д. Клюшникова, независимость действия пластических механизмов – явление, не свойственное нелинейной механике. Однако соотношения (9) нашли довольно широкое применение в теории пластичности. Это объясняется их относительной простотой. Формулы (8), (9) являются соотношениями теории пластического течения и они позволяют решать геометрически и физически нелинейные задачи теории пластичности, двигаясь малыми шагами вдоль диаграммы
ij – ij.
Соотношения в (8), (9), связывающие
Следует отметить, что в принципе возможны соотношения пластичности, не удовлетворяющие условию градиентальности, но случай этот нужно отнести к разряду необычных и считать оправданным только тогда, когда явным образом обнаруживается структурная неустойчивость материала (В. Д. Клюшников [1]).
2.3. Постановка задачи о предельном равновесии тел
Общая постановка задачи об оценке несущей способности элемента конструкции состоит в следующем (Ю. Н. Работнов [3], М. И. Ерхов [5]). На части поверхности
Для решения поставленной задачи привлекаются следующие соотношения:
Уравнения равновесия
Граничные условия для напряжений
Кинематические граничные условия
Соотношения ассоциированного закона деформирования
 (13)
(13)Уравнение поверхности нагружения, соответствующие предельному состоянию (уравнение поверхности текучести или поверхности прочности)
Поля скоростей перемещений и скоростей деформаций могут иметь допустимые разрывы и связаны между собой соотношениями
Решение полной системы уравнений (10) – (15) в общем случае является чрезвычайно сложной задачей. Аналитические решения о несущей способности конструкций получены только для ограниченного круга задач.
2.4. Уравнение баланса мощностей
Вариационные принципы механики являются исключительно мощным средством исследования конструкций. Хотя соответствующие системы разрешающих уравнений механики сплошной среды вытекают как условия стационарности определенных функционалов, тем не менее, вариационные формулировки имеют ряд преимуществ (К. Вашидзу [6]). В частности, вариационные принципы иногда приводят к формулам для верхней и нижней оценок точного решения задачи. Основой для вариационной формулировки задач во многих случаях служит принцип возможных перемещений (принцип виртуальной работы) (Н. Н. Бухгольц [7]), который можно сформулировать так: пусть механическая система, на которую наложены заданные геометрические связи, находится в равновесии под действием приложенных сил. Тогда сумма всех виртуальных работ 'W всех внешних и внутренних сил, действующих на эту систему, на любых бесконечно малых виртуальных перемещениях, удовлетворяющих заданным геометрическим связям, равна нулю:
Здесь 'W не является вариацией некоторой функции состояния W, а всего лишь означает полную виртуальную работу. Тем не менее, из (16) следуют для многих важных, для практики, случаев, соотношения, которые имеют явно вариационный характер.
Принцип виртуальной работы остается справедливым независимо от соотношений напряжения – деформации и существования потенциальных функций. Для тел, имеющих жесткие (недеформируемые) области и разрывные поля напряжений и деформаций (перемещений) уравнение (16) имеет следующий вид (М. И. Ерхов [5]):