Файл: Научноисследовательская работа по дисциплине Механика деформируемого твёрдого тела.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 30.11.2023
Просмотров: 50
Скачиваний: 3
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Параметр внешней нагрузки
Статический и кинематический методы решения задач о несущей способности конструкций основаны на двух теоремах, суть которых изложена в предыдущем разделе. Для сужения "вилки"
часто используют методы математического, в частности, линейного, программирования.
Общая задача линейного программирования заключается в следующем (Кузнецов Ю.Н., Кузубов В.И., Волощенко А.Б. [12]) . Дана линейная целевая функция
и система линейных ограничений
 (29)
(29)где n > m;
Планом, или допустимым решением, задачи линейного программирования называют вектор
Оптимальным планом, или оптимальным решением, задачи линейного программирования называют план, доставляющий наименьшее значение целевой функции (28).
В статическом методе решения задачи о несущей способности тела используют уравнения равновесия (10), (11) и уравнение предельной поверхности (14). Если
В кинематическом методе используют уравнение баланса мощностей (18), кинематические граничные условия (12), уравнение предельной поверхности (14), соотношения ассоциированного закона деформирования (13) и соотношения (15). Используя (18) определяют выражение для
Дискретизацию объекта расчета осуществляют, в большинстве случаев, с использованием метода конечных разностей, или метода конечных элементов.
Обзор литературы по теории предельного равновесия приведён, в частности, в работах Сибгатуллина Э. С. [13], [14] и Сибгатуллина К. Э. [15].
3. Пример решения задачи
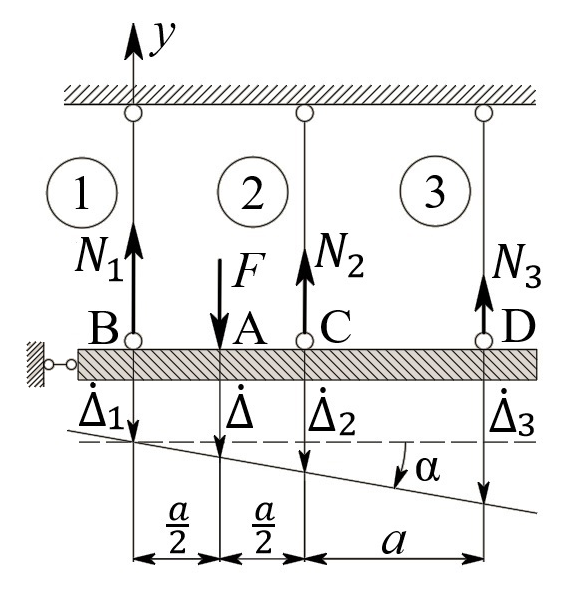
Рис. 4.
Бесконечно жесткий брус подвешен на трех вертикальных стержнях (рис. 4). Известны длины стержней
 , площади поперечных сечений стержней
, площади поперечных сечений стержней  , пределы текучести материалов стержней
, пределы текучести материалов стержней 
(i=
 ). Определить предельную нагрузку
). Определить предельную нагрузку  для рассматриваемой стержневой системы при
для рассматриваемой стержневой системы при  ,
,  = 1:1/2:1/12,
= 1:1/2:1/12,  .
.3.1. Решение задачи кинематическим методом
Согласно этому методу, истинному механизму разрушения соответствует минимальное значение кинематически возможной нагрузки
 . Для рассматриваемой системы возможны всего три различных механизма разрушения. Поэтому истинный механизм разрушения с min можно установить путем перебора этих кинематически возможных механизмов разрушения.
. Для рассматриваемой системы возможны всего три различных механизма разрушения. Поэтому истинный механизм разрушения с min можно установить путем перебора этих кинематически возможных механизмов разрушения.Согласно принципу возможных перемещений имеем:
 =
= . (31)
. (31)Здесь
 ,
, – скорости кинематически возможных перемещений точек А, В, С, D, соответственно (рис. 2),
– скорости кинематически возможных перемещений точек А, В, С, D, соответственно (рис. 2), 
 ,
,  – усилия растяжения-сжатия стержней 1, 2, 3, соответственно, в состоянии разрушения системы:
– усилия растяжения-сжатия стержней 1, 2, 3, соответственно, в состоянии разрушения системы:  , =
, =  ,
,  .
.Условия совместности скоростей перемещений:
 =
=  =
=  =
=  . (32)
. (32)Так как в кинематическом методе важно только направление вектора скоростей деформации, можно принять следующее дополнительное условие:
 =1. (33)
=1. (33)С учетом исходных соотношений между
,  и условия (33), уравнение (31) можно записать в следующем виде:
и условия (33), уравнение (31) можно записать в следующем виде: |
| ). (34)
). (34)1. Пусть
 ; тогда, согласно (32) и (33), имеем
; тогда, согласно (32) и (33), имеем  . Согласно (34) получаем:
. Согласно (34) получаем: . (35)
. (35)2. Пусть
 ; тогда
; тогда  .
.Так как скорость диссипации механической энергии не может быть отрицательной величиной, т.е.
 0 всегда, в (34)
0 всегда, в (34)  необходимо подставлять по модулю. С учетом этого имеем:
необходимо подставлять по модулю. С учетом этого имеем: . (36)
. (36)3. Пусть теперь
 ; тогда,
; тогда,  . Имеем:
. Имеем: . (37)
. (37)Из кинематически возможных нагрузок (35, 36, 37) выбираем наименьшее значение:
 . (38)
. (38)Значение (38) оценивает действительную разрушающую нагрузку
 сверху:
сверху: . (39)
. (39)3.2. Решение задачи статическим методом
В этом случае используем:
а) Уравнения равновесия
∑У=0, ∑
 =0; (40)
=0; (40)б) Условия прочности
 (i=1, 2, 3). (41)
(i=1, 2, 3). (41)Из схемы загружения видно (рис. 4), что в данном конкретном случае
 С учетом этого (40) и (41) запишем в виде:
С учетом этого (40) и (41) запишем в виде: ,
,  ,
, ,
,  ,
,  . (42)
. (42)Из второго уравнения (42) находим
 . (43)
. (43)Подставим (43) в остальные соотношения из (42):
F = (4/3)
 +(2/3)
+(2/3) , (44)
, (44) , ,
, , ,
,  . (45)
. (45)Теперь задача формулируется так: найти max F из (44) при выполнении условий (45). Это – задача линейного программирования. В данном случае она может быть решена графически (рис. 5).
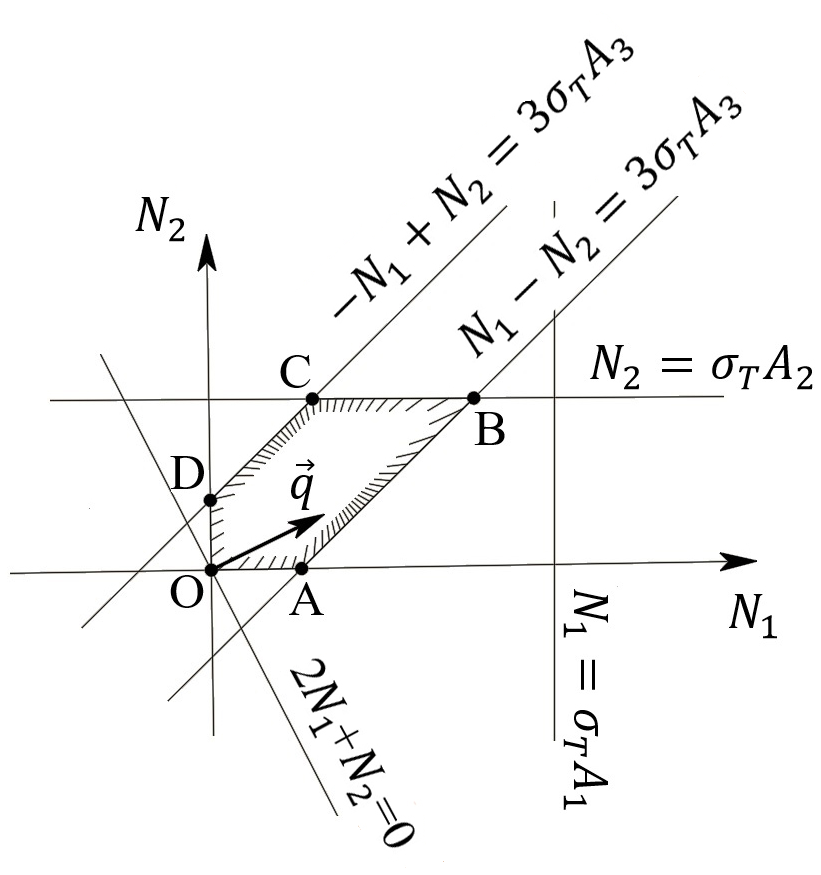
Рис. 5.
Условия (45) в плоскости
 выделяют невогнутую область допустимых решений задачи, ограниченную многоугольником OABCDO. Вектор
выделяют невогнутую область допустимых решений задачи, ограниченную многоугольником OABCDO. Вектор  , перпендикулярный прямой (4/3) +(2/3) =0, показывает направление роста функции (44). Ясно, что в данном случае искомым является решение, соответствующее точке В на рис. 5. Используя координаты точки В, находим:
, перпендикулярный прямой (4/3) +(2/3) =0, показывает направление роста функции (44). Ясно, что в данном случае искомым является решение, соответствующее точке В на рис. 5. Используя координаты точки В, находим: