ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 01.12.2023
Просмотров: 196
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
МЭМ =f(
§ 7.2. Влияние величины тока возбуждения на работу синхронных двигателей
При постоянной нагрузке на валу синхронного двигателя (Р=3UI
Когда э. д. с. машины определяется вектором E02, вектор тока I02,сдвинутый относительно вектора э.д.с.
Такой режим работы двигателя называется перевозбужденным.
При уменьшении тока возбуждения двигателя его э. д. с. также уменьшается (E03<E02) и между вектором тока I03 и вектором напряжения UCсоздается положительный сдвиг фаз на угол
, вектор напряжения UCопережает вектор тока I03. Двигатель потребляет из сети индуктивную нагрузку, и его режим является недовозбужденным.
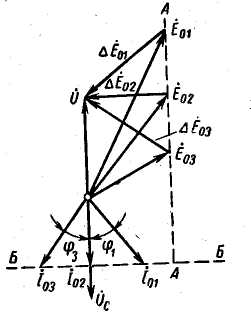
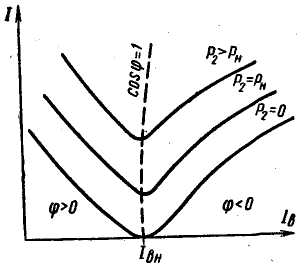
Рис. 7.3. Угловые характеристики синхронных машин
Таким образом, воздействуя на величину возбуждения двигателя, можно менять угол сдвига фаз между его векторами тока и напряжения. Двигатель может работать не только с коэффициентом мощности, равным единице (
Для каждой нагрузки синхронного двигателя можно получить расчетным или опытным путем зависимости величины потребляемого тока I от тока возбуждения IB (рис. 7.4). Эти зависимости называются U-образными кривыми. Ток IBH соответствует работе двигателя при коэффициенте мощности
Левые ветви характеристик соответствуют индуктивному току (ф>0), а правые ветви — емкостному току (ф<0). Синхронные двигатели, работающие с перевозбуждением, используются для повышения коэффициента мощности электрических установок и называются синхронными компенсаторами.
§ 7.3. Рабочие характеристики синхронных двигателей
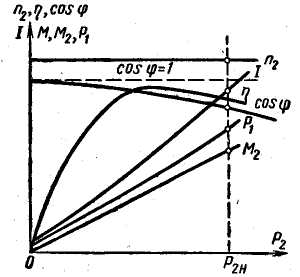
Синхронные двигатели обладают рядом особенностей, о которых лучше всего судить по их рабочим характеристикам (рис. 7.5). Эти характеристики показывают зависимость I, п, М, М2, P1
U=const и f=const. Скорость вращения ротора п2всегда равна синхронной скорости n2=n1=f160/pи не зависит от нагрузки, поэтому она имеет вид прямой, параллельной оси абсцисс.
Момент двигателя М=М0+М2, где Мо— момент холостого хода, М2— полезный тормозной момент. Так как M0=const, а М2=P2/
 Кратковременная перегрузочная способность синхронного двигателя, так же как и синхронного генератора, зависит от величины угла
Кратковременная перегрузочная способность синхронного двигателя, так же как и синхронного генератора, зависит от величины угла При этих значениях кратковременная перегрузочная способность синхронного двигателя (см. рис. 7.2)
Рис. 7.5. Рабочие характеристики синхронного двигателя
Подведенная к двигателю мощность P1включает в себя потери (Р1=P2+
Поэтому увеличение потребляемой мощности Р1 происходит несколько в большей мере, чем полезной мощности Р2 и характеристика
Р1=f(Р2) имеет некоторую кривизну в сторону оси абсцисс. Ток пропорционален вращающему моменту и он будет выражаться той же прямой, что и момент М. При изменении нагрузки от 0 до 1/2 Pн кривая к. п. д. быстро возрастает, а затем ее рост прекращается, и к. п. д. машины даже понижается.
Изменение
Синхронные двигатели применяются главным образом для привода механизмов значительной мощности (свыше 100 кет), требующих постоянства числа оборотов.
В судовых условиях они используются в основном на судах технического флота (земснарядах), в электрических приводах компрессоров, центробежных насосов, лебедок, а также в системах генератор-двигатель.
§ 7.4. Пуск синхронных двигателей
Рис. 7.6. Схема пуска синхронного двигателя
Пуск синхронных двигателей осложняется тем, что при включении двигателя в сеть трехфазного переменного тока в обмотке его статора возникает вращающееся магнитное поле, сразу приобретающее синхронную скорость п1= 60f/p, в то время как поле полюсов неподвижно. Вследствие этого каждые полпериода