ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 03.12.2023
Просмотров: 135
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
высокий КПД, а также высокую надежность.
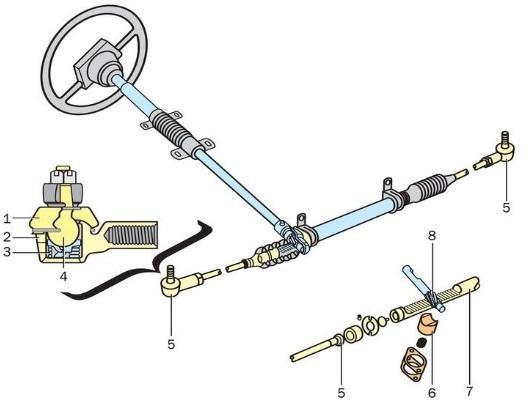
Рис. 1 Реечный рулевой механизм: 1 — чехол; 2 — вкладыш; 3 — пружина; 4 — шаровой палец; 5 — шаровой шарнир; 6 — упор; 7 — рулевая рейка; 8 — шестерня
Червячный рулевой механизм состоит из глобоидного червяка (червяка с непостоянным диаметром), также соединенного с рулевым валом, и ролика. На валу ролика вне корпуса рулевого механизма установлен рычаг - сошка, связанная с тягами рулевого редуктора.
Червячный рулевой механизм обладает сравнительно меньшей чувствительностью к ударным нагрузкам, обеспечивает гораздо большие углы поворота управляемых колес и также лучшую маневренность автомобиля. А с другой стороны червячный механизм сложен в изготовлении, и по этой причине дорог.
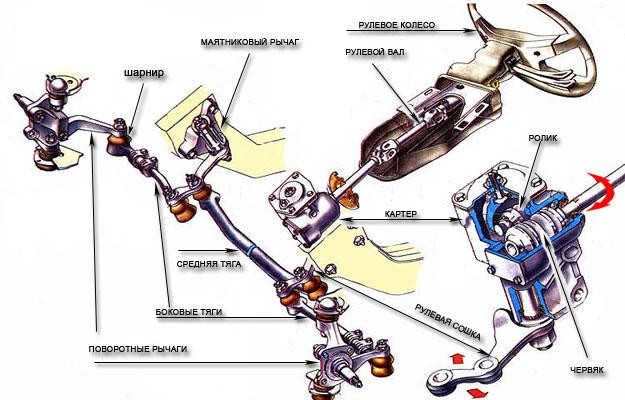
Рис. 2 Червячный рулевой механизм
Рулевое управление с таким механизмом имеет большое число соединений и деталей, поэтому требуется периодическая регулировка. Червячный рулевой механизм применяется почти на всех легковых автомобилях высокой проходимости с зависимой подвеской управляемых колес, легких грузовых автомобилях и автобусах. Ранее такой тип рулевого механизма устанавливался на отечественных «жигулях».
Винтовой рулевой механизм вбирает в себя следующие конструктивные элементы: винт, иногда соединенный карданом с валом рулевого колеса; гайку, перемещаемую по винту; зубчатую рейку, вырезанную по гайке; зубчатый
сектор, соединенный с рейкой; рулевую сошку, расположенную на валу сектора.
Особенностями винтового рулевого механизма являются соединения винта и гайки с помощью шариков, вследствие чего достигается меньшее трение и износ механизма.
По своей сути работа винтового рулевого механизма почти схожа с работой червячного механизма. Поворот руля сопровождается вращением винта, который перемещает насаженную на него гайку. При этом происходит круговое движение шариков. Гайка с помощью зубчатой рейки перемещает зубчатый сектор и с ним рулевую сошку.
1.4 Рулевое управление. Обзор и тенденции
Не так давно существовали два варианта рулевых механизмов с дискретными гидроусилителями: реечные и «винт шариковая гайка сектор». Последние ставили на большие автомобили и автомобили повышенной проходимости. А сегодня и на тяжелых машинах все чаще и чаще появляются облегченные реечные рулевые механизмы.
Делать управление комфортным почти во всех случаях, помогают редукторы рулевых мехпнизмов с переменным передаточным отношением: в центральной части рейки зубья нарезаны с малыми шагами, на концах - шаг больше. При небольших углах поворота машина не так остро и резко реагирует на действия рулем, что в свою очередь крайне важно на высоких скоростях, зато, разворачиваясь, крутить руль на месте приходится меньше. Еще больше комфорта и безопасности привнесли системы изменяющие усилие водителя на руле в зависимости от скорости движения. Пример - система «Сервотроник».
В верхней части распределителя
находится полость обратного действия. В ней и двигается поршень, связан с золотником.
Такое устройство работает эффективно и надежно, однако гидравлический насос потребляет мощность двигателя, увеличивая расход зоил ива. Такое решение недопустимо для автомобилей с маломощными двигателями. Конструкторы нашли иное решение: давление рабочей жидкости нагнетает вспомогательный электрический насос. Блок управления считывает информацию от датчиков вращения руля, а также скорости автомобиля.
Производители знают, что благодаря электрогидравлическим усилителям автомобиль способен экономить около 0,2 л/100 км. Также известно, что инженерам намного проще подбирать характеристики, настраивать устройство для конкретной модели автомобиля.
Испытания рулевого механизма входят в состав дорожных испытаний на надежность и всех валидационных испытаний автомобиля.
Следующий шаг — активное управление (Active Steering). Главное его преимущество — возможность менять передаточное число между рулем и управляемыми колесами. На отрезке пути от рулевого колеса к рулевому механизму с гидроусилителем внедрена планетарная передача с дополнительным электромотором.
Когда автомобиль отъезжает от места остановки, передаточное отношение соответственно минимально, а количество полных оборотов руля получается не более двух. С ростом скорости транспортного средства управление также становится менее чувствительным, а стоит немного увеличить скорость — как электромотор, ускоряя водило планетарного редуктора, увеличивает передаточное
число в нем.
В свою очередь активное рулевое управление, работая совместно с другими системами автомобиля, способно помочь и в сложных ситуациях. Например, в случае, когда автомобиль заносит, блок управления, опросив датчики угла поворота рулевого колеса и скорости, подаст питание на электромотор, который непременно уменьшит передаточное число, чтобы водителю было намного легче удержать автомобиль на дороге. Также активный руль несомненно полезен и при экстренном торможении с антиблокировочной системой тормозов (ABS): если совершить остановку вовремя не удается, то водителю будет проще уйти от столкновения.
Подобная система впервые была установлена на серийные модели автомобилей BMW пятой серии. Возможно, в скором времени такие системы будут устанавливаться на множестве автомобилей, пока им на смену не придет непрямое управление, или управление по проводам.
Принцип действия электро и гидроусилителя во многом схож. Поворачивая рулевое колесо, водитель закручивает торсион — чувствительный элемент, посылающий блоку управления или компьютеру, который команду электромотору, который подкручивает руленой нал, снижая усилие на руде,
Широкое распространение электро и гидроусилителей придерживает нынешний 12-вольтовый тип электрооборудования. Поэтому пока их немного и они встречаются лишь на небольших автомобилях.
Может быть, будущее не за хитрой механикой или гидравликой, а усложненными электроникой. Крупнейшие автомобильные компании
интенсивно работают над системами бет механической святи между рулем и колесами — так называемым управлением по проводим («steering by wire»). В этом случае вращательное движение руля выслеживает специальный датчик. Электронный блок управления, получая информацию о скорости, боковых и вертикальных ускорениях, посылают сигнал на привода актуаторы — электромоторы, поворачивающие колеса.
Достоинства такой системы весьма очевидны. В критической ситуации на дороге автомобиль сможет самостоятельно (причем намного быстрее человека) повернуть колеса на достаточный угол.
Самостоятельность автомобиля определено упростит жизнь водителю: например, компьютер сможет легко припарковать автомобиль.
Такие системы выгодны и технологически: протянуть провода куда надо намного проще, чем валы и тяги с шарнирами. Рулевая трапеция уходит в прошлое - разность углов поворота колес теперь задают сами электромоторы. Кстати, и если рассматривать пассивную безопасности данная конструкция отнюдь лучше. Однако, пока не будет решена проблема надежности таких систем, серийного распространения они не получат в целях обеспечения безопасности движения.
1.5 Описание выбранного варианта конструкции
Самое широкое применение в производстве нашли следующие типы реечного рулевого управления: Тип 1 – боковое расположение ведущей шестерни (слева или справа в зависимости от расположении рулевого колеса) также при креплении боковых тяг к концу зубчатой рейки (см. Рис. 1);
 Тип2– боковое
Тип2– боковое
Рис. 1 Реечный рулевой механизм: 1 — чехол; 2 — вкладыш; 3 — пружина; 4 — шаровой палец; 5 — шаровой шарнир; 6 — упор; 7 — рулевая рейка; 8 — шестерня
Червячный рулевой механизм состоит из глобоидного червяка (червяка с непостоянным диаметром), также соединенного с рулевым валом, и ролика. На валу ролика вне корпуса рулевого механизма установлен рычаг - сошка, связанная с тягами рулевого редуктора.
Червячный рулевой механизм обладает сравнительно меньшей чувствительностью к ударным нагрузкам, обеспечивает гораздо большие углы поворота управляемых колес и также лучшую маневренность автомобиля. А с другой стороны червячный механизм сложен в изготовлении, и по этой причине дорог.
Рис. 2 Червячный рулевой механизм
Рулевое управление с таким механизмом имеет большое число соединений и деталей, поэтому требуется периодическая регулировка. Червячный рулевой механизм применяется почти на всех легковых автомобилях высокой проходимости с зависимой подвеской управляемых колес, легких грузовых автомобилях и автобусах. Ранее такой тип рулевого механизма устанавливался на отечественных «жигулях».
Винтовой рулевой механизм вбирает в себя следующие конструктивные элементы: винт, иногда соединенный карданом с валом рулевого колеса; гайку, перемещаемую по винту; зубчатую рейку, вырезанную по гайке; зубчатый
сектор, соединенный с рейкой; рулевую сошку, расположенную на валу сектора.
Особенностями винтового рулевого механизма являются соединения винта и гайки с помощью шариков, вследствие чего достигается меньшее трение и износ механизма.
По своей сути работа винтового рулевого механизма почти схожа с работой червячного механизма. Поворот руля сопровождается вращением винта, который перемещает насаженную на него гайку. При этом происходит круговое движение шариков. Гайка с помощью зубчатой рейки перемещает зубчатый сектор и с ним рулевую сошку.
1.4 Рулевое управление. Обзор и тенденции
Не так давно существовали два варианта рулевых механизмов с дискретными гидроусилителями: реечные и «винт шариковая гайка сектор». Последние ставили на большие автомобили и автомобили повышенной проходимости. А сегодня и на тяжелых машинах все чаще и чаще появляются облегченные реечные рулевые механизмы.
Делать управление комфортным почти во всех случаях, помогают редукторы рулевых мехпнизмов с переменным передаточным отношением: в центральной части рейки зубья нарезаны с малыми шагами, на концах - шаг больше. При небольших углах поворота машина не так остро и резко реагирует на действия рулем, что в свою очередь крайне важно на высоких скоростях, зато, разворачиваясь, крутить руль на месте приходится меньше. Еще больше комфорта и безопасности привнесли системы изменяющие усилие водителя на руле в зависимости от скорости движения. Пример - система «Сервотроник».
В верхней части распределителя
находится полость обратного действия. В ней и двигается поршень, связан с золотником.
Такое устройство работает эффективно и надежно, однако гидравлический насос потребляет мощность двигателя, увеличивая расход зоил ива. Такое решение недопустимо для автомобилей с маломощными двигателями. Конструкторы нашли иное решение: давление рабочей жидкости нагнетает вспомогательный электрический насос. Блок управления считывает информацию от датчиков вращения руля, а также скорости автомобиля.
Производители знают, что благодаря электрогидравлическим усилителям автомобиль способен экономить около 0,2 л/100 км. Также известно, что инженерам намного проще подбирать характеристики, настраивать устройство для конкретной модели автомобиля.
Испытания рулевого механизма входят в состав дорожных испытаний на надежность и всех валидационных испытаний автомобиля.
Следующий шаг — активное управление (Active Steering). Главное его преимущество — возможность менять передаточное число между рулем и управляемыми колесами. На отрезке пути от рулевого колеса к рулевому механизму с гидроусилителем внедрена планетарная передача с дополнительным электромотором.
Когда автомобиль отъезжает от места остановки, передаточное отношение соответственно минимально, а количество полных оборотов руля получается не более двух. С ростом скорости транспортного средства управление также становится менее чувствительным, а стоит немного увеличить скорость — как электромотор, ускоряя водило планетарного редуктора, увеличивает передаточное
число в нем.
В свою очередь активное рулевое управление, работая совместно с другими системами автомобиля, способно помочь и в сложных ситуациях. Например, в случае, когда автомобиль заносит, блок управления, опросив датчики угла поворота рулевого колеса и скорости, подаст питание на электромотор, который непременно уменьшит передаточное число, чтобы водителю было намного легче удержать автомобиль на дороге. Также активный руль несомненно полезен и при экстренном торможении с антиблокировочной системой тормозов (ABS): если совершить остановку вовремя не удается, то водителю будет проще уйти от столкновения.
Подобная система впервые была установлена на серийные модели автомобилей BMW пятой серии. Возможно, в скором времени такие системы будут устанавливаться на множестве автомобилей, пока им на смену не придет непрямое управление, или управление по проводам.
Принцип действия электро и гидроусилителя во многом схож. Поворачивая рулевое колесо, водитель закручивает торсион — чувствительный элемент, посылающий блоку управления или компьютеру, который команду электромотору, который подкручивает руленой нал, снижая усилие на руде,
Широкое распространение электро и гидроусилителей придерживает нынешний 12-вольтовый тип электрооборудования. Поэтому пока их немного и они встречаются лишь на небольших автомобилях.
Может быть, будущее не за хитрой механикой или гидравликой, а усложненными электроникой. Крупнейшие автомобильные компании
интенсивно работают над системами бет механической святи между рулем и колесами — так называемым управлением по проводим («steering by wire»). В этом случае вращательное движение руля выслеживает специальный датчик. Электронный блок управления, получая информацию о скорости, боковых и вертикальных ускорениях, посылают сигнал на привода актуаторы — электромоторы, поворачивающие колеса.
Достоинства такой системы весьма очевидны. В критической ситуации на дороге автомобиль сможет самостоятельно (причем намного быстрее человека) повернуть колеса на достаточный угол.
Самостоятельность автомобиля определено упростит жизнь водителю: например, компьютер сможет легко припарковать автомобиль.
Такие системы выгодны и технологически: протянуть провода куда надо намного проще, чем валы и тяги с шарнирами. Рулевая трапеция уходит в прошлое - разность углов поворота колес теперь задают сами электромоторы. Кстати, и если рассматривать пассивную безопасности данная конструкция отнюдь лучше. Однако, пока не будет решена проблема надежности таких систем, серийного распространения они не получат в целях обеспечения безопасности движения.
1.5 Описание выбранного варианта конструкции
Самое широкое применение в производстве нашли следующие типы реечного рулевого управления: Тип 1 – боковое расположение ведущей шестерни (слева или справа в зависимости от расположении рулевого колеса) также при креплении боковых тяг к концу зубчатой рейки (см. Рис. 1);
Тип2– боковое