Файл: Курсовой проект по дисциплине автоматизированный электропривод.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 04.12.2023
Просмотров: 56
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РФ
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
КОСТРОМСКОЙ ГОСУДАРСТВЕННЫЙ ТЕХНОЛОГИЧЕСКИЙ УНИВЕРСИТЕТ
КАФЕДРА АМТ
КУРСОВОЙ ПРОЕКТ
ПО ДИСЦИПЛИНЕ «АВТОМАТИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД»
ЗамкнутАЯ системА управления электроприводА
ВАРИАНТ 15
Выполнил:
студент гр. ……….
ФИО
Проверил:
Куликов А.В.
Кострома 2020
СОДЕРЖАНИЕ
| ВВЕДЕНИЕ | 3 |
| Задание | 4 |
| Раздел 1. Выбор электрооборудования | 5 |
| 1.1. Выбор электродвигателя | 5 |
| 1.1.1. Определение режима работы | 5 |
| 1.1.2. Расчет эквивалентного момента на валу | 6 |
| 1.1.3. Определение необходимой скорости вращения | 6 |
| 1.1.4. Определение мощности | 6 |
| 1.1.5. Выбор по каталожным данным | 7 |
| 1.1.6. Проверка по условию перегрузки | 7 |
| 1.2. Выбор управляемого преобразователя | 8 |
| | |
| 1.3. Выбор согласующего трансформатора | 9 |
| 1.4. Выбор датчика тока | 9 |
| 1.5. Выбор уравнительного реактора | 10 |
| 1.6. Выбор тахогенератора | 10 |
| 1.7. Расчет параметров цепи «тиристорный преобразователь двигатель постоянного тока» | 11 |
| 1.8. Обоснование необходимости применения замкнутой системы управления электроприводом | 12 |
| 1.9. Выводы | 13 |
| раздел 2. Расчет статики электропривода | 15 |
| 2.1. Составление схем для расчета системы управления электроприводом | 15 |
| 2.2. Определение коэффициента обратной связи по скорости | 15 |
| 2.3. Определение максимального напряжения задания скорости | 17 |
| 2.4. Определение коэффициента обратной связи по току | 17 |
| 2.5. Определение коэффициентов усиления суммирующего усилителя | 18 |
| 2.6. Построение статической характеристики электропривода для замкнутой и разомкнутой систем управления | 19 |
| 2.7. Выводы | 21 |
| | |
| Раздел 3. Расчет динамики электропривода | 22 |
| 3.1. Составление структурной схемы электропривода для расчета динамики | 22 |
| 3.2. Составление передаточных функций элементов | 23 |
| 3.2.1. Составление передаточной функции двигателя постоянного тока | 23 |
| 3.2.2. Составление передаточной функции тиристорного преобразователя | 24 |
| 3.2.3. Составление передаточной функции цепи обратной связи по скорости | 24 |
| 3.3. Составление передаточной функции системы | 25 |
| 3.4. Проверка устойчивости системы электропривода | 26 |
| 3.5. Синтез корректирующего устройства | 27 |
| 3.6. Построение переходного процесса в системе электропривода по управлению | 30 |
| 3.7.Построение переходного процесса в системе ЭП по возмущению | 32 |
| 3.8. Выводы | 34 |
| 4. Выводы по курсовому проекту | 34 |
| Список использованной литературы | 36 |
| ПРИЛОЖЕНИЕ 1 | 37 |
Введение
Для приведения в движение большинства рабочих машин необходима механическая энергия. Источником механической энергии чаще всего является электропривод, осуществляющий преобразование электрической энергии в механическую.
Современный электропривод определяет собой уровень энерговооруженности труда и, благодаря своим преимуществам по сравнению со всеми другими видами приводов, является основным и главным средством автоматизации рабочих машин и производственных процессов.
Э
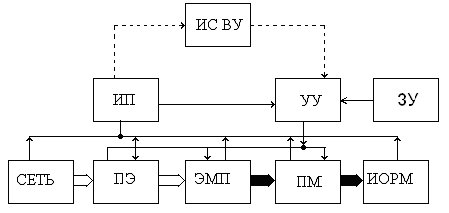 лектропривод (ЭП) это – электромеханическая система, состоящая из электромеханического преобразователя (ЭМП), преобразователя электрической энергии (ПЭ), преобразователя механической энергии (ПМ), информационных преобразователей (ИП) и управляющего устройства (УУ), предназначенная для приведения в движение исполнительных органов рабочей машины (ИО РМ) и управления этим движением. В отдельных случаях в этой системе могут отсутствовать ПЭ и ПМ преобразователи. Структура электропривода приведена на рис.1.
лектропривод (ЭП) это – электромеханическая система, состоящая из электромеханического преобразователя (ЭМП), преобразователя электрической энергии (ПЭ), преобразователя механической энергии (ПМ), информационных преобразователей (ИП) и управляющего устройства (УУ), предназначенная для приведения в движение исполнительных органов рабочей машины (ИО РМ) и управления этим движением. В отдельных случаях в этой системе могут отсутствовать ПЭ и ПМ преобразователи. Структура электропривода приведена на рис.1.Рис.1. Структура электропривода
Преобразователь электрической энергии (ПЭ) преобразует род тока, напряжение, частоту и изменяет показатели качества электрической энергии. Он предназначен для создания управляющего воздействия на ЭМП.
Электромеханический преобразователь (ЭМП) является основной частью ЭП, он предназначен для преобразования электрической энергии в механическую, чаще всего это электродвигатель.
Преобразователь механической энергии (ПМ) предназначен для передачи механической энергии от электродвигательного устройства электропривода к (ИОРМ) и согласования вида и скоростей их движения.
Управляющее устройство (УУ) на основе информации получаемой по каналам связи от ИП и задающего устройства (ЗУ) управляет ПЭ, ЭМП, ПМ.
Параметрами электропривода являются: скорость, угол поворота выходного вала, ток двигателя, момент на валу, диапазон регулирования, жесткость механической характеристики, электромеханическая и электромагнитная постоянные времени.
ЗАДАНИЕ
-
Требования к электроприводу.
| Показатели | №4 |
| Диапазон регулирования угловой скорости D | 20 |
| Статизм регулирования угловой скорости не более зад, % | 2 |
| Допустимое перерегулирование угловой скорости не более , % | 20 |
| Время регулирования не более tр, с | 1,5 |
| Допустимое число колебаний не более Nр | 2 |
-
Данные механизма при кратковременном режиме работы.
| Показатели | №35 | |
| Моменты сопротивления на валу, Нм | ММ1 | 300 |
| ММ2 | 200 | |
| ММ3нач | 400 | |
| ММ3кон | 200 | |
| ММ4 | 100 | |
| Интервалы времени, мин | t1 | 20 |
| t2 | 20 | |
| t3 | 10 | |
| t4 | 40 | |
| Момент инерции механизма Jм, кгм2 | 40 | |
| Максимальная угловая скорость механизма Мmax, с-1 | 11 | |
-
Данные редуктора.
| Показатели | 8 |
| Передаточное отношение iп | 16 |
| КПД п | 0,93 |
РАЗДЕЛ 1. ВЫБОР ЭЛЕКТРООБОРУДОВАНИЯ
Выбор двигателя будем проводить на основе метода эквивалентного момента.
Выбор электрооборудования включает следующие этапы:
• анализ характера изменения возмущающих моментов;
• расчет мощности и выбор электродвигателя по требуемым максимальным значениям параметров движения;
• проверка правильности выбора электродвигателя по перегрузочной способности и тепловому режиму;
• выбор элементов силового комплектного тиристорного преобра
зователя;
• расчет параметров системы тиристорный преобразователь - двигатель.
1.1. ВЫБОР ЭЛЕКТРОДВИГАТЕЛЯ
1.1.1. Определение режима работы.
Кратковременный режим работы (S2) это режим, при котором периоды неизменной номинальной нагрузки чередуются с периодами отключения машины; при этом периоды нагрузки не настолько длительны, чтобы превышения температуры машины могли достигнуть установившихся значений, а периоды остановки настолько длительны, что все части ее охлаждаются до температуры окружающей среды.
Стандартизованы следующие продолжительности рабочего периода: 10, 30, 60 и 90 мин. Они указываются в обозначении режима, например, S2-10 мин.
В подобном режиме работают электродвигатели привода механизмов разводки мостов, подъема щитов плотин, опускания шлюзов, поворота лотков в инкубаторах и др.
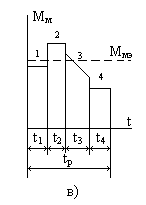
Рис. 2 Нагрузочная диаграмма механизма.
Определим время работы электродвигателя:

1.1.2. Расчет эквивалентного момента на валу.
В случае если нагрузочная диаграмма содержит наклонные трапецеидальные участки, их надо предварительно заменить эквивалентными ступенями.
 Рассчитаем эквивалентный момент на валу двигателя:
Рассчитаем эквивалентный момент на валу двигателя:

Определим эквивалентный момент на валу двигателя (коэффициент запаса Кз=1,3):

1.1.3. Определение необходимой скорости вращения.
Найдем максимальную угловую скорость электродвигателя:

Найдем максимальную частоту вращения электродвигателя:

1.1.4. Определение мощности.
Рассчитаем эквивалентную мощность Рэкв на валу двигателя при наибольшей угловой скорости:

Определим расчетную мощность на валу электродвигателя при кратковременном режиме:
Tн - постоянная времени нагрева электродвигателя, которая выбирается из справочника
Tн=50

1.1.5. Выбор электродвигателя по каталожным данным.
Выбор двигателя по частоте вращения и по мощности производим по условиям:



Выбираем двигатель ДПТ ПБСТ-42 (номинальная скорость
 )
)Мощность
Напряжение

Ток

Момент

Магнитный поток

КПД

Момент инерции

Число витков обмоток якоря
Сопротивление якоря при 15 оС

Сопротивление добавочных полюсов при 15 оС

Число витков обмотки возбуждения

Сопротивление обмотки возбуждения при 15 оС

Постоянная времени нагрева

1.1.6. Проверка электродвигателя по условию перегрузки.
Для того чтобы двигатель не был перегружен и смог разогнаться до номинальной скорости, должно соблюдаться условие:
Определим максимальный момент электродвигателя:

Определим наибольший за рабочий цикл момент сопротивления на валу электродвигателя (приведенный к валу двигателя):