Файл: Курсовой проект по дисциплине автоматизированный электропривод.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 04.12.2023
Просмотров: 61
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
раздел 2. Расчет статики электропривода
В данном разделе необходимо построить статическую характеристику электропривода в замкнутой системе управления, а также рассчитать коэффициенты обратных связей по скорости и току, коэффициент усиления промежуточного усилителя и максимальное напряжение задатчика скорости.
Построить электромеханическую характеристику электропривода.

Wфдт
2.1. Составление схем для расчета системы управления электроприводом.
Рис. 3 Структурная схема тиристорного электропривода постоянного тока.
Двигатель представлен апериодическим и интегрирующим звеньями, охваченными ООС по ЭДС двигателя, и безинерционным звеном. На двигатель действует возмущающее воздействие. Звенья преобразователя включены последовательно в цепь основного воздействия. На суммирующий усилитель подаются сигналы задатчика скорости и сигналы двух ООС – по скорости и по току. В цепь ОС по скорости входят: датчик скорости, фильтр и регулируемый коэффициент ОС по скорости. В цепь ОС по току входят: датчик тока и фильтр датчика тока, узел отсечки и регулируемый коэффициент ОС по току.
2.2. Определение коэффициента обратной связи по скорости.
На основе структурной схемы системы для расчета обратной связи по скорости составим упрощенную структурную схему, полагая:
обратная связь по току не действует;
рассматриваем установившийся режим работы.
 Рис. 4. Структурная схема для расчета коэффициента ОС по скорости.
Рис. 4. Структурная схема для расчета коэффициента ОС по скорости.
Здесь переменные:
Uз задающее напряжение, В;
bc коэффициент рассчитываемой ОС по скорости;
kтг коэффициент передачи тахогенератора
, Вс;
kу коэффициент усиления суммирующего усилителя, В/В;
kрс коэффициент усиления РС, В/В;
kтп коэффициент усиления ТП, В/В;
угловая скорость вращения двигателя, с-1;
Еn выходная ЭДС тиристорного преобразователя, В;
Rэ эквивалентное активное сопротивление цепи «преобразователь –двигатель», Ом;
kд коэффициент передачи двигателя;
Iя – ток якорной цепи «преобразователь – двигатель».
Напряжение U коэффициента усиления усилителя задания, соответствующее верхней границе диапазона примем Uзmax=10 В.
Определим коэффициент kнеобх:

Найдём коэффициент обратной связи по скорости:

Найдем регулируемый коэффициент обратной связи по скорости:
2.3. Определение максимального напряжения задания скорости и коэффициента усиления усилителя.
Определим коэффициент усиления усилителя:

Определим максимальное напряжение задания:


2.4. Определение коэффициента обратной связи по току.
Для электродвигателей постоянного тока значение предельно допустимого тока лежит в пределах Imax =(23)Iном.


Учитывая, что запаздывание в цепи обратной связи, обусловленное фильтрами на выходе датчиков, обычно мало и характер изменения самой выходной величины примерно идентичен характеру изменения выходного напряжения датчика, можно положить, что:
Тфдт=Тфтг
Тфтг – постоянная времени датчика скорости (Т
фтг =0,005с)
Тфдт – постоянная времени датчика тока
Найдем среднестатистическое запаздывание преобразователя (фазность преобразователя m=6):

Тф – постоянная времени фильтра на входе системы на импульсно-фазового управления (Тф=0,005с)
Найдем полную постоянную времени тиристорного преобразователя:

Тогда

Определим регулируемый коэффициент обратной связи по току:


2.5. Определение коэффициентов усиления суммирующего усилителя.
Для канала по задающему воздействию коэффициент усиления суммирующего усилителя находится:
Из условия работы двигателя на максимальной требуемой угловой скорости вращения:

Для канала обратной связи по скорости коэффициент усиления суммирующего усилителя можно найти:
Из условия протекания в якорной цепи двигателя, при его работе на рассчитываемую нагрузку тока равного Iпот:

Д ля канала обратной связи по току коэффициент усиления суммирующего усилителя будет:
ля канала обратной связи по току коэффициент усиления суммирующего усилителя будет:
Сводная таблица параметров.
2.6. Построение статической характеристики электропривода в замкнутой и разомкнутой системе управления.
В соответствии со схемой Рис. 4 и при учете всех обратных связей можно записать уравнение:

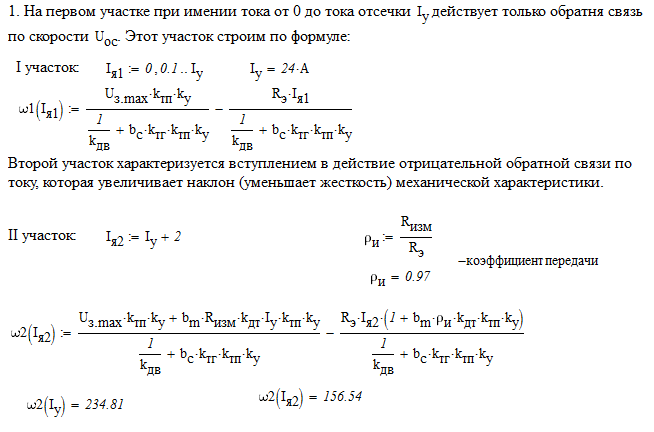
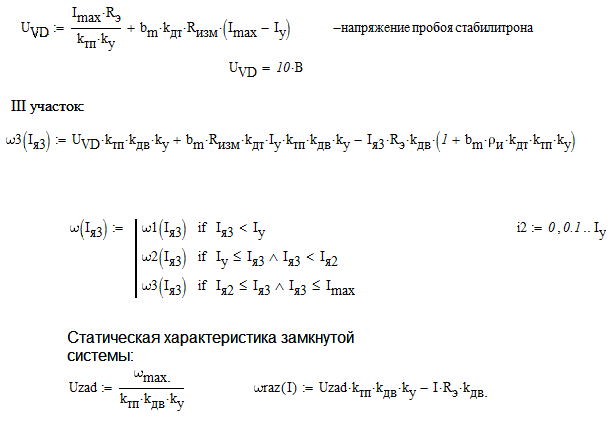
Строим статическую характеристику электропривода:
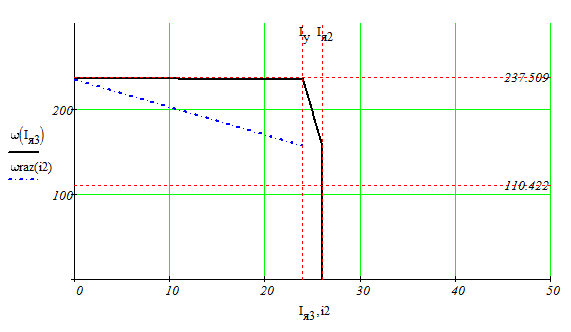
Рис. 5. Статическая характеристика

2.7. Выводы по разделу
В данном разделе определили коэффициенты обратных связей по скорости и току, максимальное напряжение задания задатчика скорости, коэффициенты промежуточного усилителя по каналам задающего воздействия и обратных связей, а также построены статические электромеханические характеристики электропривода в замкнутой и разомкнутой системе управления.
Анализируя данную характеристику можно выделить следующие моменты.
Во-первых, рабочий участок, где действует ООС по скорости, оказался жестким, что позволяет регулировать скорость без существенного уменьшения мощности.
Во-вторых, получены значения тока отсечки Iу= 24 А, то есть значение, до достижения которого действует только ОС по скорости. Также найдено значение тока стопорения Iя2= 26А.
В-третьих, наглядно можно убедиться, как режимы защиты влияют на жесткость характеристики.
Раздел 3. Расчет динамики электропривода
В данном разделе рассматривается возможность получения динамических показателей работы спроектированного электропривода, в соответствии с заданными, т.е. строится и анализируется переходный процесс в системе электропривода.
Переходные процессы играют большую роль в работе ЭП и РМ. Характер их протекания предопределяет производительность машины, качество выпускаемой продукции, а также заметно сказывается на режимах работы ЭП. Вид переходного процесса зависит от свойств всех элементов привода и рабочей машины.
3.1. Составление структурной схемы электропривода для расчета динамики.
На основе функциональной схемы можно составить обобщенную структурную схему замкнутой системы электропривода со всеми обратными связями
Рис. 6. Обобщенная структурная схема замкнутой системы ЭП.
Ограничимся расчетом динамики системы, не учитывая задержанную обратную связь по току, вследствие ее нелинейности и сложности расчетов. Поэтому обобщенную схему можно представить, как:
Рис. 7 Упрощенная структурная схема замкнутой системы ЭП.
3.2. Составление передаточных функций элементов.
3.2.1. Составление передаточной функции двигателя постоянного тока.
В соответствии со структурной схемой тиристорного электропривода постоянного тока с учетом того, что обратная связь по току не действует, а момент статической нагрузки равен нулю, можно составить передаточную функцию двигателя постоянного тока независимого возбуждения:
Преобразуя данное выражение, получаем:
Приведем передаточную функцию к виду, удобному для логарифмирования
Тмц=0,47 с 4Тяц=40,12=0,48с, т.е.Тмц<4Тяц, то передаточная функция двигателя будет представлена колебательным звеном:

Где Т и ɛ рассчитываются по формулам
- фиктивная постоянная времени:
T=0,24
- коэффициент затухания:

ɛ = 0,936
Рис. 8 Структурная схема двигателя по моменту.
На основании упрощенной структурной схемой замкнутой системы электропривода (Uз=const), запишем передаточную функцию двигателя по моменту:
В данном разделе необходимо построить статическую характеристику электропривода в замкнутой системе управления, а также рассчитать коэффициенты обратных связей по скорости и току, коэффициент усиления промежуточного усилителя и максимальное напряжение задатчика скорости.
Построить электромеханическую характеристику электропривода.
Wфдт
2.1. Составление схем для расчета системы управления электроприводом.
Рис. 3 Структурная схема тиристорного электропривода постоянного тока.
Двигатель представлен апериодическим и интегрирующим звеньями, охваченными ООС по ЭДС двигателя, и безинерционным звеном. На двигатель действует возмущающее воздействие. Звенья преобразователя включены последовательно в цепь основного воздействия. На суммирующий усилитель подаются сигналы задатчика скорости и сигналы двух ООС – по скорости и по току. В цепь ОС по скорости входят: датчик скорости, фильтр и регулируемый коэффициент ОС по скорости. В цепь ОС по току входят: датчик тока и фильтр датчика тока, узел отсечки и регулируемый коэффициент ОС по току.
2.2. Определение коэффициента обратной связи по скорости.
На основе структурной схемы системы для расчета обратной связи по скорости составим упрощенную структурную схему, полагая:
обратная связь по току не действует;
рассматриваем установившийся режим работы.
Рис. 4. Структурная схема для расчета коэффициента ОС по скорости.Здесь переменные:
Uз задающее напряжение, В;
bc коэффициент рассчитываемой ОС по скорости;
kтг коэффициент передачи тахогенератора
, Вс;
kу коэффициент усиления суммирующего усилителя, В/В;
kрс коэффициент усиления РС, В/В;
kтп коэффициент усиления ТП, В/В;
угловая скорость вращения двигателя, с-1;
Еn выходная ЭДС тиристорного преобразователя, В;
Rэ эквивалентное активное сопротивление цепи «преобразователь –двигатель», Ом;
kд коэффициент передачи двигателя;
Iя – ток якорной цепи «преобразователь – двигатель».
Напряжение U коэффициента усиления усилителя задания, соответствующее верхней границе диапазона примем Uзmax=10 В.
Определим коэффициент kнеобх:
Найдём коэффициент обратной связи по скорости:
Найдем регулируемый коэффициент обратной связи по скорости:
2.3. Определение максимального напряжения задания скорости и коэффициента усиления усилителя.
Определим коэффициент усиления усилителя:
Определим максимальное напряжение задания:
2.4. Определение коэффициента обратной связи по току.
Для электродвигателей постоянного тока значение предельно допустимого тока лежит в пределах Imax =(23)Iном.
Учитывая, что запаздывание в цепи обратной связи, обусловленное фильтрами на выходе датчиков, обычно мало и характер изменения самой выходной величины примерно идентичен характеру изменения выходного напряжения датчика, можно положить, что:
Тфдт=Тфтг
Тфтг – постоянная времени датчика скорости (Т
фтг =0,005с)
Тфдт – постоянная времени датчика тока
Найдем среднестатистическое запаздывание преобразователя (фазность преобразователя m=6):
Тф – постоянная времени фильтра на входе системы на импульсно-фазового управления (Тф=0,005с)
Найдем полную постоянную времени тиристорного преобразователя:
Тогда
Определим регулируемый коэффициент обратной связи по току:
2.5. Определение коэффициентов усиления суммирующего усилителя.
Для канала по задающему воздействию коэффициент усиления суммирующего усилителя находится:
Из условия работы двигателя на максимальной требуемой угловой скорости вращения:
Для канала обратной связи по скорости коэффициент усиления суммирующего усилителя можно найти:
Из условия протекания в якорной цепи двигателя, при его работе на рассчитываемую нагрузку тока равного Iпот:
Д
ля канала обратной связи по току коэффициент усиления суммирующего усилителя будет:Сводная таблица параметров.
| Название величины | Обозначение | Единицы | Значение |
| Коэффициент регулируемой обратной связи по скорости | bс | | 0,133 |
| Коэффициент регулируемой обратной связи по току | bт | | 0,95 |
| Максимальное напряжение задатчика скорости | Uзmax | В | 10 |
| Коэффициент усиления суммирующего усилителя по каналу задатчика скорости | kуз | | 1 |
| Коэффициент усиления суммирующего усилителя по каналу обратной связи по скорости | kуос | | 1,34 |
| Коэффициент усиления суммирующего усилителя по каналу обратной связи по току | kут | | 15,83 |
2.6. Построение статической характеристики электропривода в замкнутой и разомкнутой системе управления.
В соответствии со схемой Рис. 4 и при учете всех обратных связей можно записать уравнение:
Строим статическую характеристику электропривода:
Рис. 5. Статическая характеристика
2.7. Выводы по разделу
В данном разделе определили коэффициенты обратных связей по скорости и току, максимальное напряжение задания задатчика скорости, коэффициенты промежуточного усилителя по каналам задающего воздействия и обратных связей, а также построены статические электромеханические характеристики электропривода в замкнутой и разомкнутой системе управления.
Анализируя данную характеристику можно выделить следующие моменты.
Во-первых, рабочий участок, где действует ООС по скорости, оказался жестким, что позволяет регулировать скорость без существенного уменьшения мощности.
Во-вторых, получены значения тока отсечки Iу= 24 А, то есть значение, до достижения которого действует только ОС по скорости. Также найдено значение тока стопорения Iя2= 26А.
В-третьих, наглядно можно убедиться, как режимы защиты влияют на жесткость характеристики.
Раздел 3. Расчет динамики электропривода
В данном разделе рассматривается возможность получения динамических показателей работы спроектированного электропривода, в соответствии с заданными, т.е. строится и анализируется переходный процесс в системе электропривода.
Переходные процессы играют большую роль в работе ЭП и РМ. Характер их протекания предопределяет производительность машины, качество выпускаемой продукции, а также заметно сказывается на режимах работы ЭП. Вид переходного процесса зависит от свойств всех элементов привода и рабочей машины.
3.1. Составление структурной схемы электропривода для расчета динамики.
На основе функциональной схемы можно составить обобщенную структурную схему замкнутой системы электропривода со всеми обратными связями
Рис. 6. Обобщенная структурная схема замкнутой системы ЭП.
Ограничимся расчетом динамики системы, не учитывая задержанную обратную связь по току, вследствие ее нелинейности и сложности расчетов. Поэтому обобщенную схему можно представить, как:
Рис. 7 Упрощенная структурная схема замкнутой системы ЭП.
3.2. Составление передаточных функций элементов.
3.2.1. Составление передаточной функции двигателя постоянного тока.
В соответствии со структурной схемой тиристорного электропривода постоянного тока с учетом того, что обратная связь по току не действует, а момент статической нагрузки равен нулю, можно составить передаточную функцию двигателя постоянного тока независимого возбуждения:
Преобразуя данное выражение, получаем:
Приведем передаточную функцию к виду, удобному для логарифмирования
Тмц=0,47 с 4Тяц=40,12=0,48с, т.е.Тмц<4Тяц, то передаточная функция двигателя будет представлена колебательным звеном:
Где Т и ɛ рассчитываются по формулам
- фиктивная постоянная времени:
T=0,24
- коэффициент затухания:
ɛ = 0,936
Рис. 8 Структурная схема двигателя по моменту.
На основании упрощенной структурной схемой замкнутой системы электропривода (Uз=const), запишем передаточную функцию двигателя по моменту: