Файл: Курсовой проект по дисциплине автоматизированный электропривод.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 04.12.2023
Просмотров: 58
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
преобразуя, получим

Рассчитаем коэффициент передачи двигателя по моменту:
 Принимаем
Принимаем  , где С-коэффициент двигателя
, где С-коэффициент двигателя
3.2.2. Составление передаточной функции тиристорного преобразователя.
Передаточную функцию тиристорного преобразователя представим в виде:
Найдем среднестатистическое запаздывание преобразователя (фазность преобразователя m=6):

Тф – постоянная времени фильтра на входе системы на импульсно-фазового управления (Тф=0,005с)
Найдем полную постоянную времени тиристорного преобразователя:


3.2.3. Составление передаточной функции цепи обратной связи по скорости.
В общем случае передаточную функцию цепи обратной связи по скорости можно записать:
W(p)=kтгWфтг(p)
Передаточную функцию цепи обратной связи по скорости можно записать в виде:
Вносим поправку в регулируемый коэффициент обратной связи по скорости:


3.3 . Составление передаточной функции системы.
Имеем структурную схему системы электропривода постоянного тока с тиристорным управляемым выпрямителем (двигатель представлен колебательным звеном):
Рис. 9. Расчетная схема ЭП.
Составим передаточную функцию разомкнутой системы:
Wраз(p)= Wу(p)Wтп(p)Wд(p)Wocс(p)
Можно упростить: (Ттпр+1)(Тфтгр+1)=Тэсp+1

Тогда

3.4. Проверка устойчивости системы электропривода.
Для расчета устойчивости системы регулирования применим метод построения логарифмических частотных характеристик. Необходимым и достаточным условием устойчивости по Найквисту является пересечение ЛАЧХ разомкнутой системы оси абсцисс раньше, чем ЛФЧХ пересечет линию, соответствующую ее фазовому сдвигу –π.
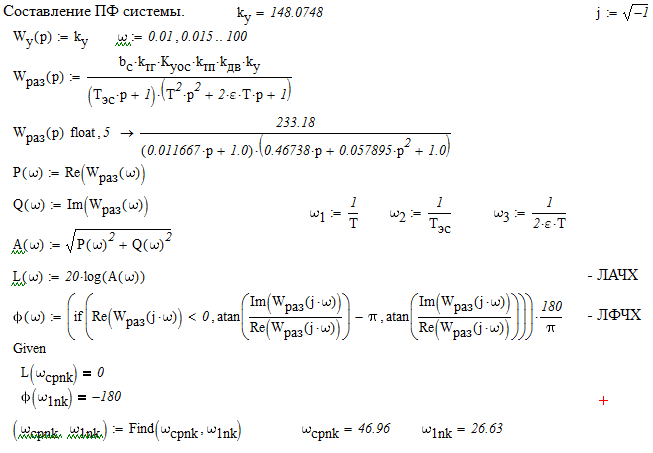
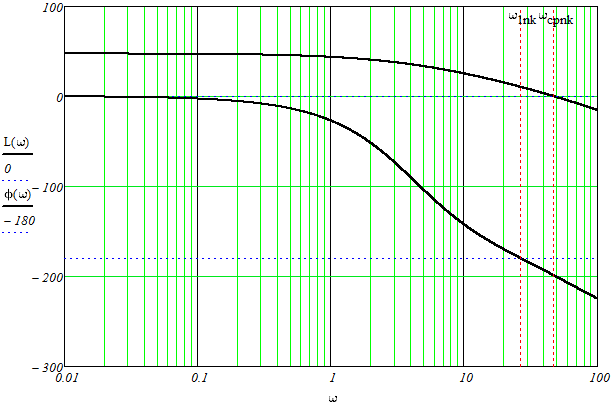
Рис. 10. ЛАЧХ и ЛФЧХ
Из построенных ЛАЧХ и ЛФЧХ видно что система не устойчива, т.к. не удовлетворяет критерию устойчивости Найквиста. Поэтому будем вводить корректирующие устройства.
3.5. синтез корректирующего устройства.
Корректирующее устройство должно обеспечивать отсутствие статической ошибки регулирования, ограничить (не более заданного) перерегулирование и время регулирования.

Д
 ля нашей передаточной функции системы асимптотическая амплитудно-частотная логарифмическая характеристика будет иметь вид:
ля нашей передаточной функции системы асимптотическая амплитудно-частотная логарифмическая характеристика будет иметь вид:В
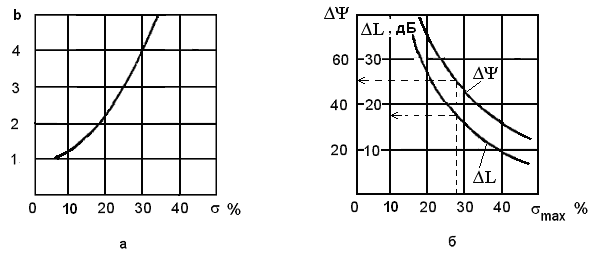 оспользовавшись номограммами В.В. Солодовникова определим желаемую частоту среза: =0,2 b=2,2
оспользовавшись номограммами В.В. Солодовникова определим желаемую частоту среза: =0,2 b=2,2 
Рис.11. Номограммы для определения частоты среза (а)
и частоты сопряжения (б)
Значение требуемого запаса устойчивости по модулю и фазе: ΔL= Δψ=
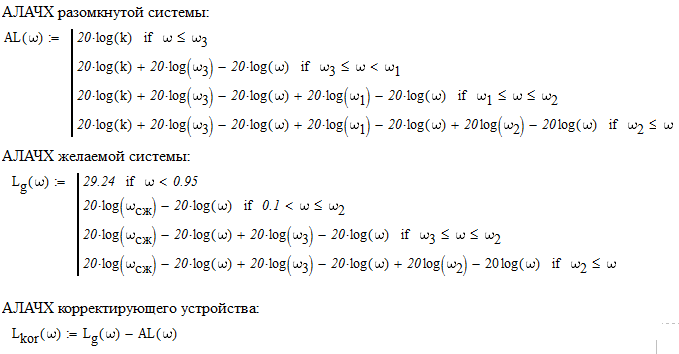
Рис. 12. Получение АЛАЧХ корректирующего звена

Передаточная функция корректирующего звена:
Физическая реализация корректирующего звена
Для данной корректирующей цепочки приемлемой будет структура, набранная из звеньев:
а) б)
 Рис. 13. Схема корректирующего устройства (а) и асимптотическая логарифмическая амплитудная характеристика (б)
Рис. 13. Схема корректирующего устройства (а) и асимптотическая логарифмическая амплитудная характеристика (б)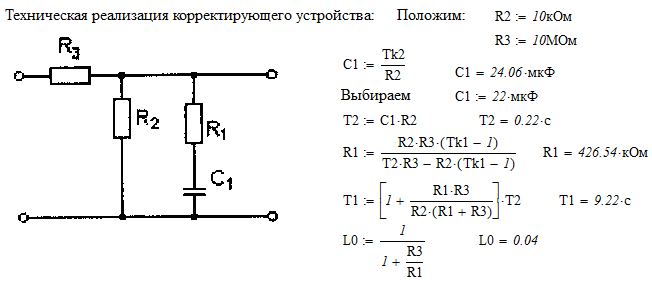
Таким образом передаточная функция корректирующего звена:
Проверим на устойчивость скорректированную систему
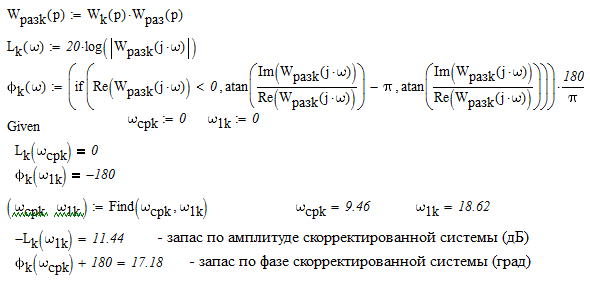
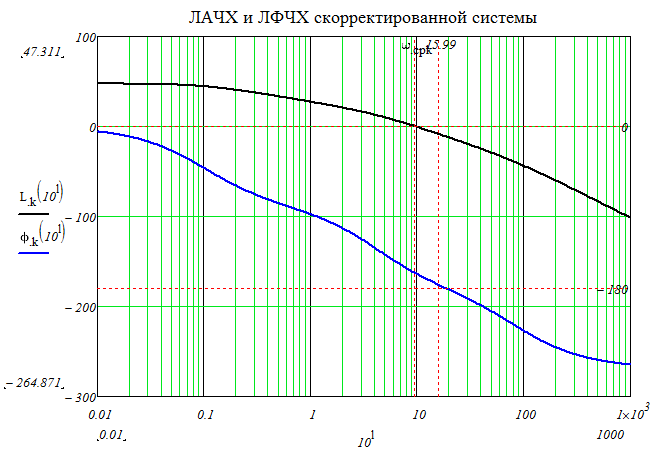
Рис. 14 ЛАЧХ и ЛФЧХ скорректированной системы
На рисунке представлены ЛАЧХ ЛФЧХ нашей системы после того, как было введено корректирующее устройство, рассчитанное выше.
Далее можно перейти к построению переходного процесса в системе электропривода.
3.6. Построение переходного процесса в системе ЭП по управлению (току)
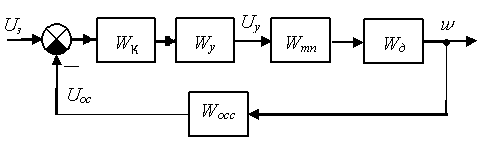
Рис.15. Упрощенная структурная схема скорректированной системы
Для построения переходного процесса системы управления электроприводом постоянного тока по управлению необходимо составить передаточную функцию замкнутой системы по управлению, пользуясь правилом:


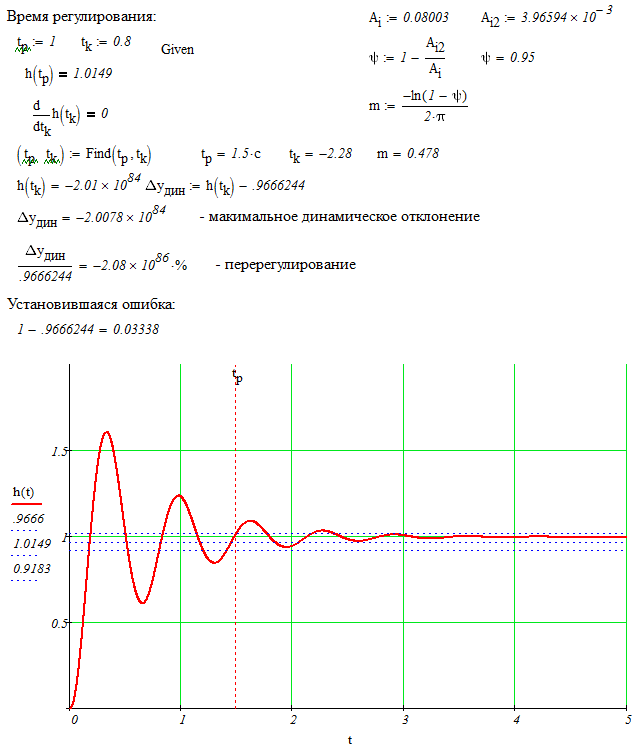
Рис.16. Переходная характеристика системы по управлению
Из полученного графика переходного процесса системы (уже с введенным корректирующим устройством) видно, что мы имеем устойчивый переходный процесс. Время переходного процесса намного меньше заданного, что удовлетворяет нашим требованиям.
Оценка качества переходного процесса.
1) Перерегулирование

2) Время регулирования

3) Число колебаний

4) Степень затухания

5) Показатель колебательности
6) Статическая ошибка (отклонение в установившемся режиме)


3.7. Построение переходного процесса в системе ЭП по возмущению (моменту)
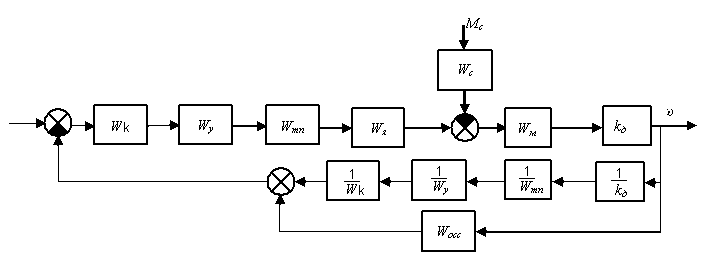
Рис. 17. Структурная схема замкнунтой системы по возмущению
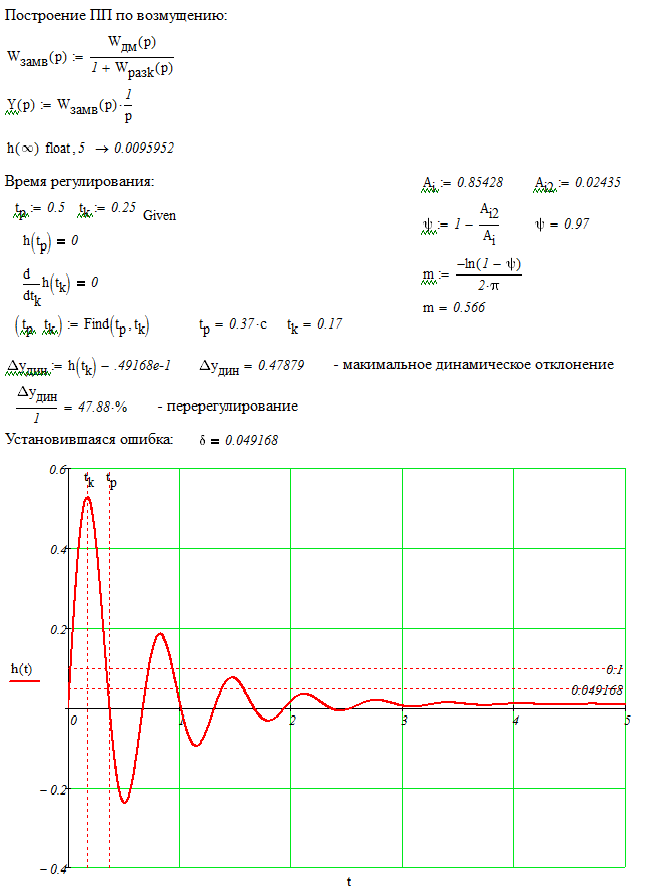
Рис.18. Переходная характеристика системы по возмущению
Оценка качества переходного процесса
1) Перерегулирование
2) Время регулирования

3) Число колебаний

4) Степень затухания
5) Показатель колебательности
6) Статическая ошибка (отклонение в установившемся режиме)

Таблица сравнения показателей качества.
| Показатели | Обозначение | Заданные | Рассчитанные |
Запас по амплитуде, дБ | La | 27 | 28,114 |
| Запас по фазе, о | Lf | 65 | 111,894 |
| Перерегулирование, % | max | 20 | 4 |
| Время регулирования, с | tp | 1,5 | 0,24 |
| Число колебаний, шт | Np | 2 | 0 |
| Степень затухания | | | 1 |
| Показатель колебательности | m | | ∞ |
| Максимальное отклонение | А1 | | 0,025 |
| Статическая ошибка | δ | 0,02 | 0,0012 |
Из приведенной таблицы видно, что полученные в результате синтеза системы показатели качества переходных процессов в ней полностью соответствуют заданию.
3.8. Выводы
В данном разделе была рассмотрена динамика проектируемой системы. При анализе системы появилась необходимость введения корректирующего устройства, которое просто реализуется с помощью пассивных элементов. Были построены переходные характеристики скорректированной системы по управлению и по возмущению, показатели качества которых удовлетворяют поставленной задаче (другие показатели качества приведены в таблицах ранее). Таким образом была спроектирована система управления электроприводом, динамические показатели работы которой удовлетворяют заданию.
4. Выводы по курсовому проекту
В ходе курсовой работы была спроектирована замкнутая система управления электроприводом постоянного тока.
 Исходя из поставленной задачи было выбрано соответствующее электрооборудование, параметры которого приведены в таблице. Особо следует выделить выбор двигателя, а также проверка его на возможность перегрузки т.е.nном nmах,
Исходя из поставленной задачи было выбрано соответствующее электрооборудование, параметры которого приведены в таблице. Особо следует выделить выбор двигателя, а также проверка его на возможность перегрузки т.е.nном nmах, 
(25) Мном Мc.max
Перечень выбранного оборудования
| Двигатель | ПБСТ-43 |
| Вентильный преобразователь | УКЭ-Л-3101-37-2-5-УХЛ4 |
| Трансформатор | ТСП-16/0.7-74У4-380-205 В |
| Датчик тока | LA55-P |
| Тахогенератор | ТС-1М |
Во второй главе курсового проекта рассчитана статика электропривода. Сюда входит определение
-
коэффициента обратной связи по скорости bC=0,133 -
по току bT=0,95 -
коэффициента усиления суммирующего усилителя по каналу ОС по скорости Kocy=1,34