Файл: Курсовой проект по дисциплине автоматизированный электропривод.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 04.12.2023
Просмотров: 57
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
-
Коэффициент усиления суммирующего усилителя по каналу задатчика скорости kуз=1 -
Коэффициент усиления суммирующего усилителя по каналу обратной связи по токуkут=15,83
Следующим шагом стало построение статической характеристики электродвигателя в замкнутой и разомкнутой системах управления, из которой получен статизм δ=0,22%, ток стопорения I2=26А и ток отсечки Iу=24А. Рабочий участок характеристики жесткий.
Завершающим этапом был расчет динамики электропривода. Были построены АЧХ и ФЧХ разомкнутой системы, а также переходная характеристика. В результате анализа результатов графиков появилась необходимость коррекции системы для получения требуемых по заданию параметров, которым исходная система не удовлетворяет. Путем вычитания из желаемой АЛАЧХ располагаемой, была найдена АЛАЧХ корректирующего звена, из вида которой была определена ПФ данного звена.
Синтезированное корректирующее устройство не обладает большой элементной базой и имеет довольно простую конструкцию. В устройстве не используются отдельные усилители, а усиление происходит за счет свойств корректирующих звеньев. Все выбранные сопротивления являются маломощными, что не вызовет больших потерь при работе, что очень важно с экономической точки зрения. Тип резисторов выбран самый распространенный – МЛТ, что делает поиск элементной базы предельно простым и дешевым. Относительно конденсаторов применена та же стратегия.
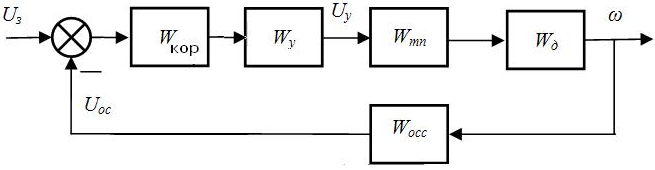
Корректирующее устройство включается между усилителем и элементом сравнения. Данное устройство корректирует сигнал поступающий с элемента сравнения и на своем выходе формирует уже скорректированный сигнал, поступающий на усилитель, далее сигнал непосредственно подается на тиристорный преобразователь.
Были построены переходные характеристики скорректированной системы по управлению и по возмущению, показатели качества которых удовлетворяют поставленной задаче.
Выполненную работу можно считать успешной, привод показал хорошие динамические и статические показатели, получено достаточно простое корректирующее устройство, а
также подобрано оборудование, которое удовлетворяет заданию.
Список использованной литературы
-
Клюев А.С. Автоматическое регулирование. М.: Энергия, 1973 -
Справочник по автоматизированному электроприводу /Под ред. Елисеева В.А. и Шинявского А.В. М.: Энергоатомиздат, 1983 -
Чиликин М.Г., Сандлер А.С. Общий курс электропривода: Учебник для вузов. М.: Энергоиздат, 1981 -
Шуваев В.Г. Автоматизированный элекропривод: Учебное пособие по курсовому проектированию. – Кострома: Издательство Костром. гос. технол. ун-та, 2008