ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 04.12.2023
Просмотров: 56
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
 (1)
(1) где
 м/с,
м/с,  - температура в градусах Цельсия, f- относительная влажность воздуха в значениях от 0 до 1.
- температура в градусах Цельсия, f- относительная влажность воздуха в значениях от 0 до 1. Линии положения (координаты x и y) и пересечение линий положения в искомой точке (координаты объекта) вычисляем, решая систему трех уравнений:

 , (2)
, (2)Где
 - разность моментов прихода сигнала на 1 и 2 датчики;
- разность моментов прихода сигнала на 1 и 2 датчики; - разность моментов прихода сигнала на 1 и 3 датчики;
- разность моментов прихода сигнала на 1 и 3 датчики; - разность моментов прихода сигнала на 2 и 3 датчики;
- разность моментов прихода сигнала на 2 и 3 датчики; - известные координаты 1,2 и 3 датчиков;
- известные координаты 1,2 и 3 датчиков;x и y–вычисляемые координаты линий положения ; / .
Порядок выполнения работы:
-
Для заданного файла записи сигнала определить моменты прихода сигналов на датчики; -
Из приведенного примера выписать координаты X и Y трех датчиков; координаты объекта даны для проверки точности создаваемых линий положения. -
Зная моменты прихода сигналов на датчики найти три разности моментов прихода ,
,  ,
,  .
. -
Из файла метеопараметров 05_09.xls выписать температуру и влажность воздуха для заданного файла и, создав файл в пакете Excel, сосчитать скорость звука по формуле (1). -
Зная скорость звука, вычислить навигационные параметры для каждой базы.
для каждой базы. -
Задавшись значениями x и y координат точки, лежащей на линии положения, рассчитать параметры по формулам системы уравнений (2). Задача состоит в том, чтобы корректировать x и y таким образом, чтобы рассчитанные в системе уравнений параметры совпали с параметрами, рассчитанными в п.5. Координаты x и y, полученные при этом, принадлежат точкам, лежащим на линиях равного положения, которые и необходимо построить. Для точности необходимо рассчитать 4 или 5 таких точек. -
Построить диаграмму в пакете Excel, на которой показать датчики, объект и линии положения, пересечение которых дает искомые координаты объекта, полученные с помощью сигналов датчиков.
Таблица 1 Расчёты моменты прихода сигналов на датчики и сравнение параметров С*∆t c навигационными параметрами
| XДатчики | X | Y | | | | | |
| 1 | 19052 | 58134 | | Температура | 12 | | |
| 2 | 18901 | 58447 | | Влажность | 0,64 | | |
| 3 | 18563 | 58524 | | C= | 338,485 | | |
| | | | | | | | |
| | | | | | | | |
Объект Датчики 1 2 3
Орудие 18612 58172 Время прихода 1,729 1,7301 1,7495
1---2 1---3 2---3
Точки Дельта T -0,0011 -0,0205 -0,0194
1----2 18001 57818 C*Дельта T -0,372333461 -6,938941776 -6,566608315
18250 57939
18550 58086 Вычисление 1---2 1---3 2---3
18900 58254 -0,539286274 -6,508098744 -6,631735964
1----3 18000 57294 -0,385193745 -6,73849365 -6,631307715
18245 57607 0,779917206 -6,801786925 -6,629765653
18550 57997 0,656904334 -6,777259084 -6,650394217
18900 58439
2----3 18000 54962
18245 56141
18550 57608
18900 59161
Таблица 2 8 вариант задания на выполнение работы
| Вариант 8 | t1=1,729 t2=1,7301 t3=1,7495 |
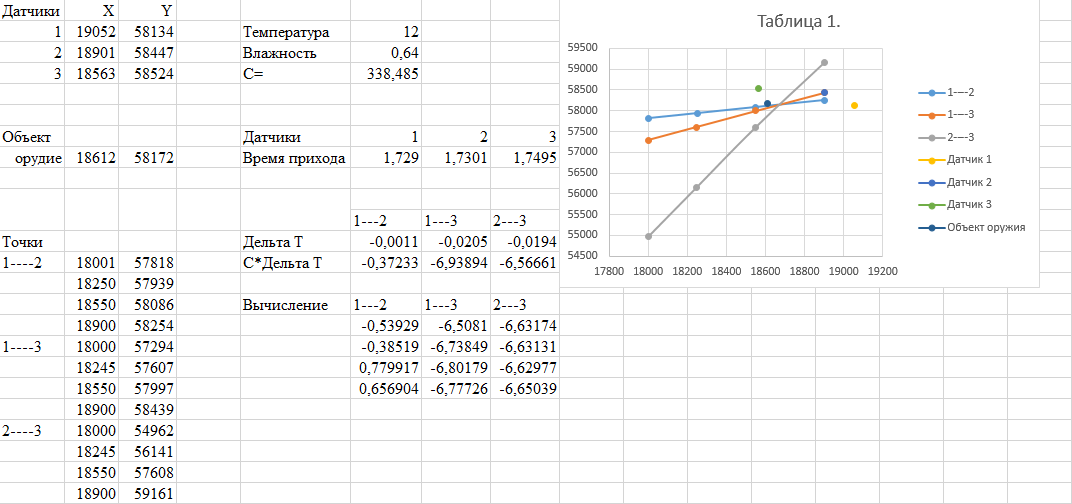
Рис. 1 Расчёты и таблица вычислений
Контрольные вопросы:
-
Опишите принцип определения местоположения объекта с помощью сигналов трех датчиков.
Ответ: Суть разностно-дальномерного метода заключается в определении местоположения источника сигнала путём измерения времени прихода сигнала в различные точки пространства. Для каждой такой точки (приёмника) сравнивается разность во времени прихода. Зная местоположение всех приёмников, можно найти местоположение источника сигнала. Этот принцип основан на использовании свойства гиперболы: разность расстояний
 от любой точки гиперболы до дух определённых точек, называемых фокусами (гиперболе не принадлежат), есть величина постоянная.
от любой точки гиперболы до дух определённых точек, называемых фокусами (гиперболе не принадлежат), есть величина постоянная. -
Опишите методику выполнения расчета.
Ответ: 1). Ищем моменты прихода сигналов на датчики (из заданного примера).
2). Из приведенного примера выписаны координаты X и Y трех датчиков; координаты объекта даны для проверки точности создаваемых линий положения.
3). Зная моменты прихода сигналов на датчики, находим три разности моментов прихода
 ,
,  ,
,  .
.4). Находим скорость звука по формуле:
 , где C0 = 331 м/c, а
, где C0 = 331 м/c, а  и f– это заданные условия из файла 05_09.xls (Вариант S0021).
и f– это заданные условия из файла 05_09.xls (Вариант S0021).5). Вычислены навигационные параметры для каждой базы, по формуле:
С * ∆t, где ∆t – разность времени прихода на датчики (1-2, 2-3, 1-3).
6). Рассчитываем параметры
 по формулам системы:
по формулам системы:  . Задача состоит в том, чтобы корректировать x и y таким образом, чтобы рассчитанные в системе уравнений параметры
. Задача состоит в том, чтобы корректировать x и y таким образом, чтобы рассчитанные в системе уравнений параметры  совпали с параметрами, рассчитанными в п.5. Координаты x и y, полученные при этом, принадлежат точкам, лежащим на линиях равного положения, которые и необходимо построить. Для точности рассчитываем 4 или 5 таких точек.
совпали с параметрами, рассчитанными в п.5. Координаты x и y, полученные при этом, принадлежат точкам, лежащим на линиях равного положения, которые и необходимо построить. Для точности рассчитываем 4 или 5 таких точек.7). Строим диаграмму в пакете Excel, на которой есть: датчики, объекты и линии положения, пересечение которых даёт искомые координаты объекта, полученные с помощью сигналов датчиков.
Лабораторная работа № 7
Нелинейное программирование с помощью Excel
Цель работы: Понять, как работает нелинейное программирование в Excel.
Задание на выполнение работы: создать таблицы данных для размерности бака, таблицы «Отчет по устойчивости» самой таблицы данных и график с маркерами «Параметрирование по стоимости», с использованием программы Excel.
Порядок выполнения работы:
1. Ввод данных для задачи нелинейного программирования (размерности бака).
1.1 Создаём таблицу с переменными: длиной (а), шириной (b) и высотой (h) равных 1, а также в ячейке C8 и C9 вводим формулы по рис. 1, и получаем результаты (рис. 2).
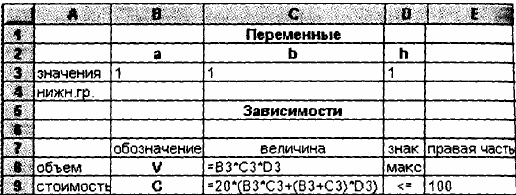
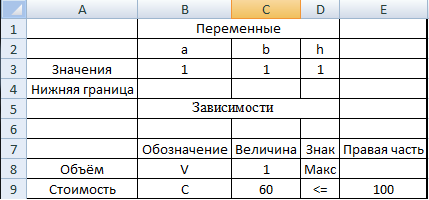
| Рис. 1 Таблица для расчёта объёма бака | Рис. 2 Готовая таблица |
1.2 Для того, чтобы работать с параметрами «Поиска решения», сначала заходим в вкладку «Данные», кликаем в «Поиск решения» (рис. 3).
Рис. 3 Значок «Поиска решения», диалогового окна
1.3 Заходим в диалоговое окно, оптимизируем целевую ячейку $С$8 (адрес величины объёма), вводим зависимость для целевой функции, которая максимизируется, потом добавляем значения переменных $B$3:$D$3 и пишем условия (рис. 4) в окно «Ограничения», с помощью кнопки «Добавить».
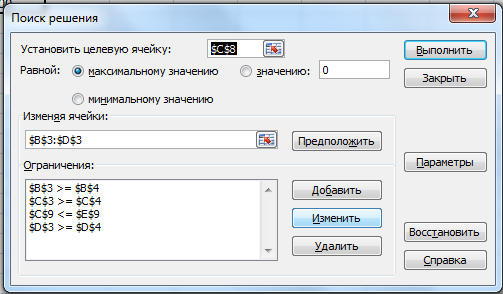
Рис. 4 «Поиск решения» с ограничениями
1.4 Вписываем все значения (рис. 5.1 и 5.2), нажав (рис. 4) кнопку «Параметры», после нажимаем «ОК», «Выполнить» и «ОК», изменятся значения в таблице (рис. 6).
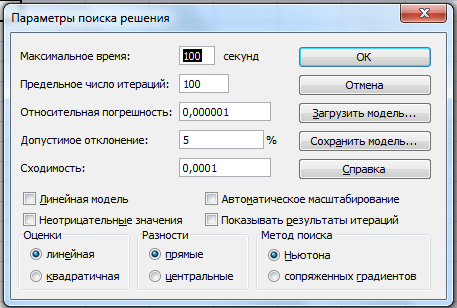
Рис. 5.1 «Параметры поиска решения», все её значения
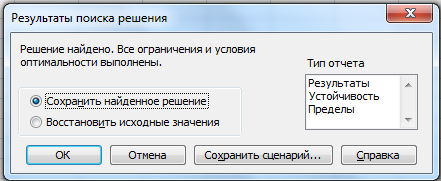
Рис. 5.2 «Результаты поиска решения»
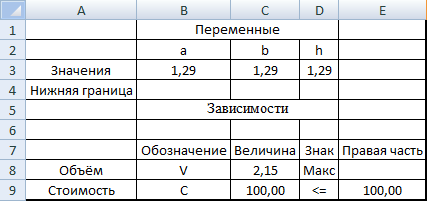
Рис. 6 Результат изменения таблицы по «Поиску решения»
2. Анализ оптимального решения
2.1 Нажав на «Устойчивость» (рис. 5.2), вызываем один вариант отчётов из трёх типов (рис. 7). На рис. 8 изображена сама таблица «Отчет по устойчивости».
Рис. 7 «Устойчивость» в «Результатах поиска решения»
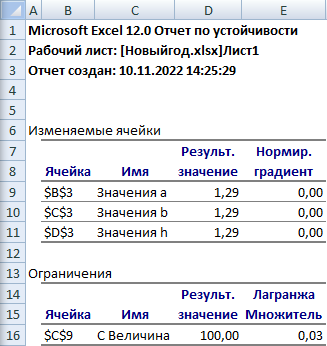
Рис. 8 Таблица «Отчет по устойчивости»
3. Вариантный анализ
3.1 Сначала в таблице (рис. 2) заменяем ячейку Е9 на различные значения (100 - 500). Потом заходим в «Поиск решения» (рис. 4), затем заходим в «Результаты поиска решения» и нажимаем на кнопку «Сохранить сценарий» (рис. 9), где мы вводим имя нового сценария, например, «С=100», и далее повторяем для каждого различного значения.