ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 05.12.2023
Просмотров: 1357
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
СОДЕРЖАНИЕ
Юнг Карл Густав .........................................……………………………..................... 494
Глава 2. Психология в структуре современных наук • 43
Глава 5. Психологическая теория деятельности • 127
Глава 5. Психологическая теория деятельности • 135
Глава 5. Психологическая теория деятельности • 145
В зависимости от того, насколько сложен центральный момент реакции, принято различать простую и сложную реакции. Простая сенсомоторная реакция — это возможно более быстрый ответ заранее известным простым одиночным движением на внезапно появившийся и, как правило, заранее известный сигнал. Она имеет только один параметр — время. Причем различают латентное время реакции, т. е. время от момента появления раздражителя, к которо-
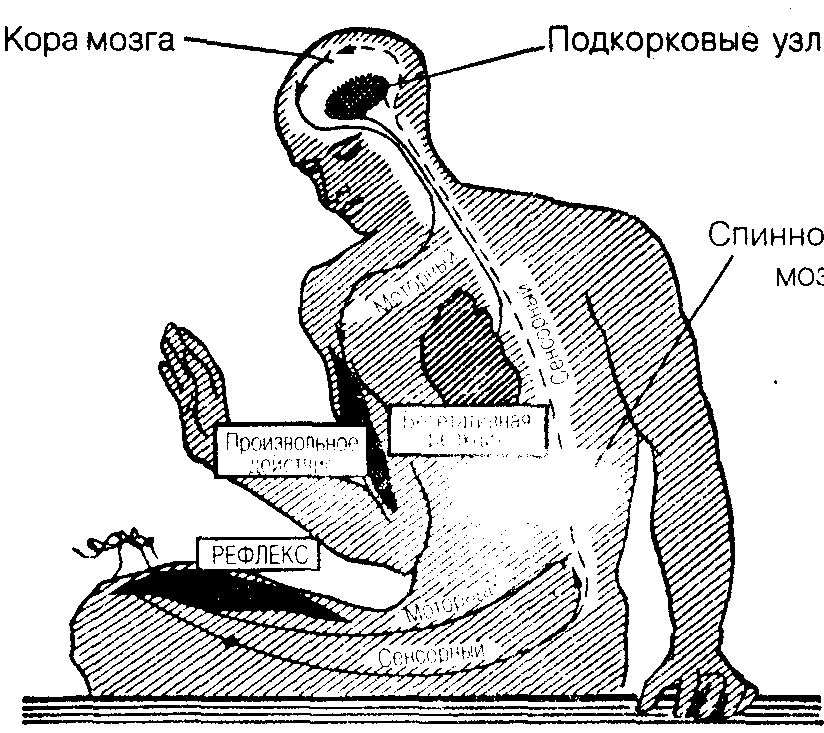
Рис. 5.2 Схема организации сенсомоторных Процессов (на основе концепции рефлекторных механизмов организации движения)
Глава 5. Психологическая теория деятельности • 137
му привлечено внимание, до начала ответного движения, и время реализации двигательного действия.
В сложных реакциях формирование ответного действия всегда связано с выбором нужного ответа из ряда возможных. Так, если необходимо из кнопок на пульте выбрать только одну, которую следует нажать в ответ на определенный сигнал, то центральный момент реакции усложняется за счет выбора кнопки и узнавания сигнала. Поэтому такую сложную реакцию принято называть реакцией выбора.
Наиболее сложным вариантом сенсомоторной реакции является сенсомотор-ная координация, при которой динамичным является не только сенсорное поле (например, при реакции на движущийся объект), но и реализация двигательного акта. С данным типом реакции мы сталкиваемся тогда, когда вынуждены не только наблюдать за изменениями сенсорного поля, но и реагировать на них значительным количеством сложных и разнонаправленных движений. Например, это происходит, когда вы играете в компьютерную игру.
В качестве особых видов психомоторных процессов выделяются сенсоречевые и идеомоторные реакции. В сенсоречевых реакциях восприятие связано с речевым ответом на воспринятое. Сеисоречевые реакции, как и сенсомоторные, имеют те же три момента: сенсорный, центральный и моторный. Но центральный момент их очень усложнен и протекает во второй сигнальной системе, а моторный проявляется как двигательный компонент речи.
Особое место в психомоторике занимают идеомоторные процессы, связывающие представления о движении с его выполнением. Суть данных процессов заключается в формировании автоматизмов и навыков в ходе овладения профессиональной деятельностью. Предполагается, что любая деятельность связана с приобретением определенных двигательных навыков, без которых успешное выполнение профессиональных обязанностей невозможно. Процесс превращения представления о движении в навык с последующим успешным выполнением этого движения является идеомоторным процессом.
Следует отметить, что разработка проблем психомоторики дала свои положительные результаты, которые широко использовались в спорте, военном деле, профессиональном обучении и т. д. Однако в процессе развития психологии стало ясно, что движение как компонент деятельности имеет гораздо более сложную организацию, чем сенсомоторный процесс. Причем самый главный недостаток психомоторики заключался в том, что двигательный акт рассматривался в качестве ответной реакции на сенсорный сигнал. Действие, как мы знаем, всегда осознанно, т. е. находится в поле нашего сознания, контролируется им. Мы, за исключением редких случаев, осознаем то, что делаем. Учитывая, что сознание всегда активно, мы вправе предположить, что сознательное движение и деятельность в целом активны, а не реактивны, как это трактуется в рамках психомоторики. Источником человеческой активности и деятельности являются не условия внешней среды, а психика человека, его потребности и мотивы.
Конечно, нельзя отрицать, что сенсомоторных процессов не существует. Они присутствуют в деятельности человека, но они не в состоянии объяснить все механизмы сознательных движений. В их трактовке отсутствует самый главный компонент психики человека — его сознание. Скорее всего, сенсомоторные реакции — это частный вариант автоматизмов и не более. Все это стало ясно в ходе развития
138 • Часть I. Введение в общую психологию
Имена
Бернштейн Николай Александрович (1896-1966) — отечественный психофизиолог. Создал и применил новые методы исследования — кимоциклографию и циклограмметрию, с помощью которых изучал движения человека (в процессе труда, занятия спортом и др.). Анализ полученных исследований позволил ему разработать концепцию физиологии активности и формирования движений человека в норме и патологии. В ходе проводимых исследований Бернштейн сформулировал идею «рефлекторного кольца».
На основании его разработок проводилось восстановление движений у раненых во время Великой Отечественной войны, а в послевоенные годы — формирование навыков у спортсменов. Кроме этого, разработки Бернштейна были использованы при конструировании шагающих автоматов, а также других устройств, управляемых ЭВМ.
Созданная им общая теория построения движений изложена в монографии «О построении движений», 1947 г.
психологии. Было найдено более точное описание физиологических и психических механизмов движений, что позволяет нам сегодня говорить не о психомоторике, а о психологии построения движений.
Механизмы организации движений. Существующее в настоящее время в психологии представление о физиологии движений были сформулировано и экспериментально обосновано выдающимся российским ученым Н. А. Бернштейном.
Врач-невропатолог по образованию, физиолог по своим научным интересам, Бернштейн выступал в научной литературе как страстный защитник принципа активности — одного из тех принципов, на которых строится психологическая теория деятельности. В 1947 г. вышла одна из основных книг Бернштейна «О построении движений», которая была удостоена Государственной премии. В этой книге был высказан ряд совершенно новых идей. Одна из них состояла в опровержении принципа рефлекторной дуги как механизма организации движений и замене его принципом рефлекторного кольца.
Объектом изучения Бернштейн сделал естественные движения нормального, неповрежденного организма, и, в основном, движения человека. Главное внимание в исследованиях Бернштейна было уделено трудовым движениям. Для изучения движений ему пришлось разработать специальный метод их регистрации. До работ Бернштейна в физиологии бытовало мнение, что двигательный акт организуется следующим образом: на этапе обучения движению в двигательных центрах формируется и фиксируется его программа; затем в результате действия какого-то стимула она возбуждается, в мышцы идут моторные командные импульсы, и движение реализуется. Таким образом, в самом общем виде механизм движения описывался схемой рефлекторной дуги: стимул - процесс его центральной переработки (возбуждение программ) - двигательная реакция.
Первый вывод, к которому пришел Бернштейн, состоял в том, что на основе такого механизма не может осуществляться хоть сколько-нибудь сложное движение. Если простое движение, например коленный рефлекс, может произойти в ре-
Глава 5. Психологическая теория деятельности • 139
зультате прямого проведения моторных команд от центра к периферии, то сложные двигательные акты, которые призваны решать определенные задачи, так строиться не могут. Главная причина состоит в том, что результат любого сложного движения зависит не только от собственно управляющих сигналов, но и от целого ряда дополнительных факторов, которые вносят отклонения в запланированный ход выполнения движений. В результате конечная цель может быть достигнута только в том случае, если в ход выполнения движения будут постоянно вноситься поправки. А для этого центральная нервная система должна иметь информацию о ходе выполнения движения.
Таким образом, Бернштейн предложил совершенно новый принцип управления движениями, который был назван принципом сенсорных коррекций.
Рассмотрим факторы, которые, по мнению Бернштейна, оказывают влияние на ход выполнения движения. Во-первых, при выполнении движения в большей или меньшей степени возникает явление реактивных сил. Например, если вы сильно взмахнете рукой, то в других частях тела разовьются реактивные силы, которые изменят их положение и тонус.
Во-вторых, при движении возникает явление инерции. Если вы резко поднимете руку, то она взлетает вверх не только за счет тех моторных импульсов, которые посланы в мышцы, но с какого-то момента движется но инерции, т. е. возникают определенные инерционные силы. Причем явление инерции присутствует в любом движении.
В-третьих, существуют определенные внешние силы, которые оказывают влияние на ход выполнения движения. Например, если движение направлено на какой-либо предмет, то оно встречает с его стороны сопротивление. Причем это сопротивление чаще всего оказывается непредсказуемым.
В-четвертых, существует еще один фактор, который не всегда учитывается при начале выполнения движений, — это исходное состояние мышц. Состояние мышцы меняется при выполнении движения вместе с изменением ее длины, а также в результате утомления и других причин. Поэтому один и тот же моторный импульс, достигнув мышцы, может дать совершенно иной результат.
Таким образом, существует целый перечень факторов, оказывающих непосредственное воздействие на ход выполнения движения. Следовательно, центральной нервной системе необходима постоянная информация о ходе выполнения движения. Эта информация получила название сигналов обратной связи. Эти сигналы могут одновременно поступать от мышц в мозг по нескольким каналам. Например, когда мы двигаемся, информация о положении отдельных частей тела поступает от проприоцептивных рецепторов. Однако параллельно информация поступает через органы зрения. Аналогичная картина наблюдается даже при выполнении речевых движений. Человек получает информацию не только от рецепторов, контролирующих движения языкового аппарата, но и через слух. Причем информация, поступающая по разным каналам, должна быть согласованной, иначе выполнение движения становится невозможным.
Таким образом, можно сделать вывод о том, что существует определенная схема осуществления механизмов движения. Она была названа Бернштейном схемой рефлекторного кольца. Эта схема основана на принципе сенсорных коррекций и является его дальнейшим развитием.
140 • Часть I. Введение в общую психологию
В упрощенном виде эта схема выглядит так: из моторного центра (М) в мышцу (рабочую точку мышцы) поступают эффекторные команды. От рабочей точки мышцы идут афферентные сигналы обратной связи в сенсорный центр (3). В ЦНС происходит переработка поступившей информации, т. е. перешифровка ее в моторные сигналы коррекции, после чего сигналы вновь поступают в мышцу. Получается кольцевой процесс управления (рис. 5.3).
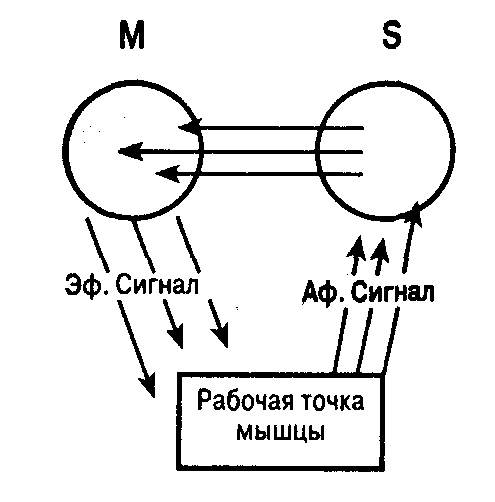
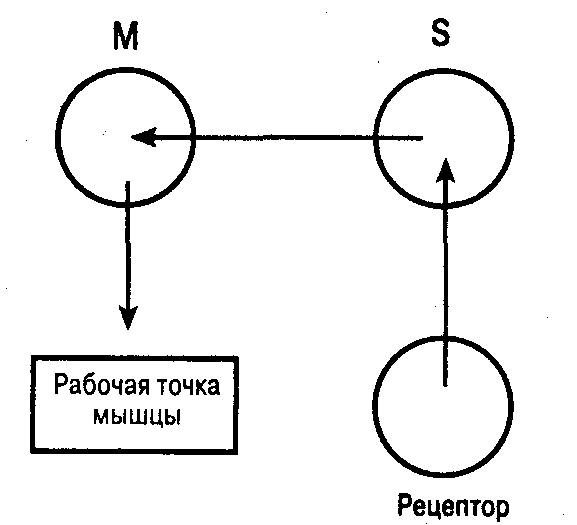
Рис. 5.3. Принципиальное различие концепций построения движений на основе рефлекторной дуги и рефлекторного кольца. Объяснения в тексте
В этой схеме рефлекторная дуга выглядит как один из ее частных случаев, когда совершаются движения, не нуждающиеся в коррекции, т. е. движения рефлекторной природы. Позднее Бернштейн детализировал схему рефлекторного кольца. В схеме присутствуют следующие элементы: моторные «выходы» (эффектор), сенсорные «входы» (рецептор), рабочая точка или объект (если речь идет о предметной деятельности), блок перешифровки, программа, регулятор, задающий прибор, прибор сличения.
С наличием большего количества элементов рефлекторное кольцо функционирует следующим образом, В программе записаны последовательные этапы сложного движения. В каждый конкретный момент отрабатывается какой-то частный этап или элемент, соответствующая частная программа запускается в задающий прибор. Из задающего прибора сигналы (SW — «то, что должно быть») поступают на прибор сличения. На тот же блок от рецептора приходят сигналы обратной связи (IW — «то, что есть»), сообщающие о состоянии рабочей точки. В приборе сличения эти сигналы сравниваются, и на выходе из него получаются сигналы рассогласования (В\У) между требуемым и фактическим положением вещей. Далее они попадают на блок перешифровки, откуда выходят сигналы коррекции, которые через промежуточные инстанции (регулятор) попадают на эффектор (рис. 5.4).
Рассматривая данную схему, необходимо обратить внимание на одну интересную деталь. Рецептор не всегда посылает сигналы на прибор сличения. Бывают случаи, когда сигнал поступает сразу на задающий прибор. Это бывает в тех случаях, когда экономичнее перестроить движение, чем его корректировать. Это особенно важно в экстренных ситуациях.