Файл: А.Е. Медведев Регулирующий микропроцессорный контроллер Р-130.pdf
ВУЗ: Кузбасский государственный технический университет
Категория: Методичка
Дисциплина: Электроника
Добавлен: 05.02.2019
Просмотров: 3432
Скачиваний: 8

Министерство образования Российской Федерации
Кузбасский государственный технический университет
Кафедра электропривода и автоматизации
РЕГУЛИРУЮЩИЙ МИКРОПРОЦЕССОРНЫЙ
КОНТРОЛЛЕР P-130
Методические указания к выполнению лабораторной работы
по дисциплине “Системы автоматизации и управления” для
студентов направления 550200 “Автоматизация и управление”
Составитель А.Е. Медведев
Утверждены на заседании кафедры
Протокол № 5 от 31.03.2000
Рекомендованы к печати методической
комиссией по направлению 550200
Протокол № 3 от 31.03.2000
Электронная копия находится в
библиотеке главного корпуса КузГТУ
Кемерово 2001

1
ЦЕЛЬ РАБОТЫ
Ознакомиться с устройством регулирующего микропроцессорно-
го контроллера Р-130 и получить навыки решения задач автоматиче-
ского регулирования и автоматического программного управления на
базе Ремиконта Р-130.
2. ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ
2.1.Ознакомиться с составом и техническими данными Р-130, рас-
положением и назначением клавиатуры и средств индикации на лице-
вой панели контроллера и пульте настройки.
2.2.Изучить основы технологического программирования, на-
стройки и контроля Р-130.
2.2.Осуществить программирование двухпозиционного регулято-
ра температуры воздуха в нагревательной камере.
2.4.Провести экспериментальные исследования процесса регули-
рования температуры в автоматическом режиме управления. Записать
изменения регулируемой величины
Θ
0
(t) и определить фактические па-
раметры регулятора – порог срабатывания Х
ср
и зону возврата Х
∆, а
также период колебаний регулируемой величины.
2.5.Осуществить программирование устройства программного
управления бетоносмесительной установкой (БСУ).
2.6.Провести экспериментальные исследования работы цикличе-
ской системы автоматического программного управления БСУ. Запи-
сать, используя секундомер, моменты включения и отключения свето-
диодов имитатора БСУ, построить по их временным параметрам фак-
тические диаграммы работы БСУ и сравнить их с расчетными диа-
граммами.
3.СОДЕРЖАНИЕ ОТЧЕТА
3.1.Назначение, состав и основные технические данные Р-130.
Клавиатура и средства индикации лицевой панели и пульта настройки.
3.2.Конфигурация и параметры настройки Х
ср
, Х
∆ двухпозицион-
ного регулятора (Таблица процедур программирования “Приб”,
”Сист”, ”Алг”, ”Конф”, ”Настр”).

2
3.3.Экспериментальная характеристика изменения температуры
Θ
0
(t) в камере в процессе регулирования и определенные по ней фак-
тические параметры настройки регулятора – параметр срабатывания
Х
*
ср
и гистерезис Х
∆
*
.
3.4.Конфигурация и параметры настройки устройства программ-
ного управления механизмами БСУ. Процедуры программирования
“Алг”, ”Конф”, ”Настр”.
3.5.Экспериментальные временные диаграммы работы механиз-
мов БСУ и фактические временные параметры устройства программ-
ного управления.
4.ОСНОВЫ ПРИМЕНЕНИЯ КОНТРОЛЛЕРА Р-130
4.1.Назначение, состав и технические данные контроллера
Ремиконт Р-130 – это компактный малоканальный многофунк-
циональный микропроцессорный контроллер, предназначенный для
автоматического регулирования и логического управления технологи-
ческими процессами. Он предназначен для применения в электротех-
нической, энергетической, химической, металлургической, пищевой,
цементной, стекольной и других отраслях промышленности.
Благодаря малоканальности Ремиконт Р-130 позволяет, с одной
стороны, экономично управлять небольшим агрегатом и, с другой, -
обеспечить высокую надежность крупных систем управления.
Ремиконт Р-130 имеет две модели – регулирующую и логическую.
Регулирующая модель предназначена для решения задач автоматиче-
ского регулирования, логическая модель – для реализации логических
программ шагового управления.
Как регулирующая, так и логическая модель Ремиконта Р-130 со-
держит средства оперативного управления, расположенные на лицевой
панели контроллера. Эти средства позволяют вручную изменять режи-
мы работы, устанавливать задание, управлять ходом выполнения про-
граммы, вручную управлять исполнительными устройствами, контро-
лировать сигналы и индицировать ошибки.
Стандартные аналоговые и дискретные датчики и исполнитель-
ные устройства подключаются к Ремиконту Р-130 с помощью индиви-
дуальных кабелей связей. Внутри контроллера сигналы обрабатывают-
ся в цифровой форме.
3
Ремиконты Р-130 могут объединяться в локальную управляющую
сеть “Транзит” кольцевой конфигурации.
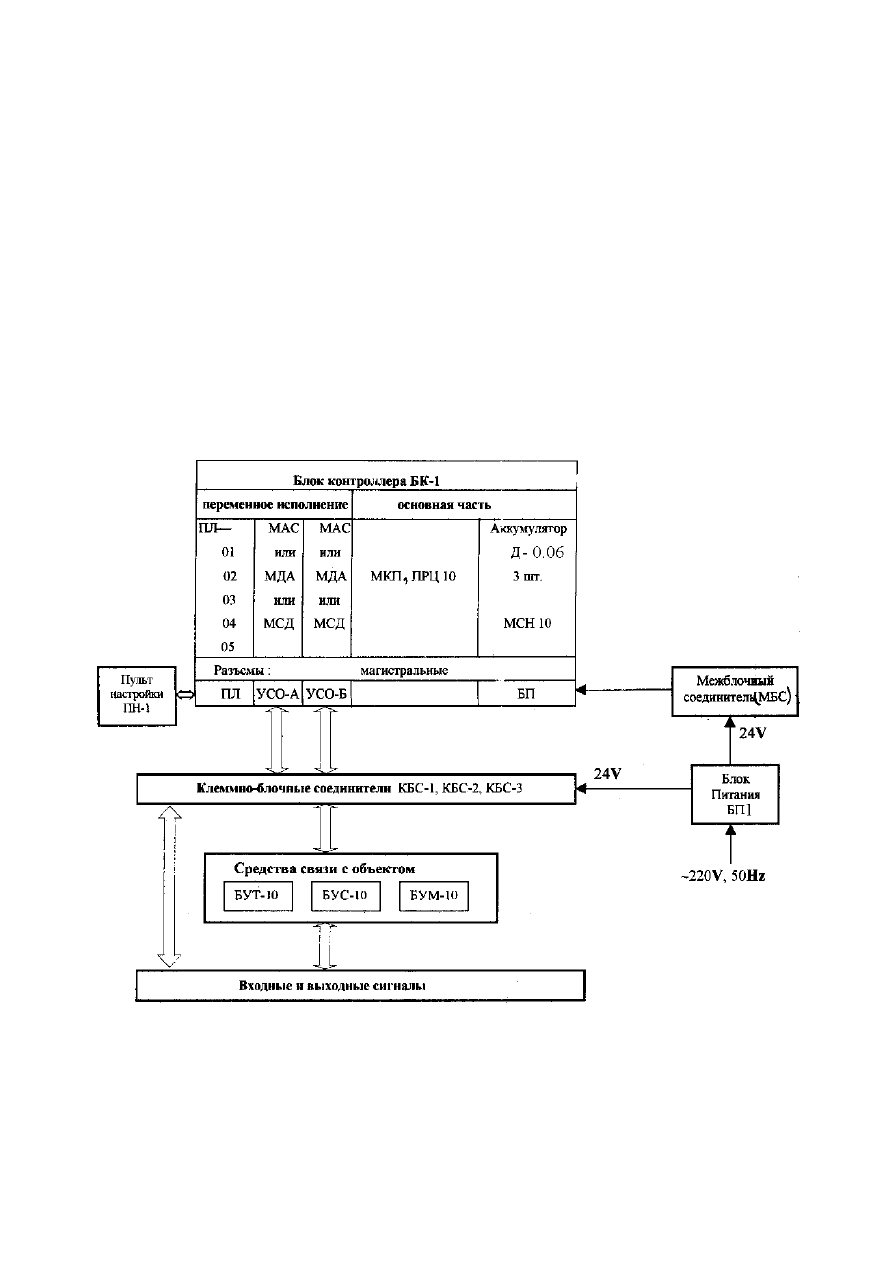
Ремиконт Р-130 представляет собой комплекс технических
средств. В его состав (рис. 1) входят: а) центральный блок – блок кон-
троллера БК-1 с выносным пультом настройки ПН-1; б) блок питания
БП-1; в) блоки усилителей сигналов низкого уровня и термопар
БУТ-10, сигналов резистивных датчиков БУС-10, мощности БУМ;
г) блок переключения БПР-10 и шлюза БШ-1; д) блок стирания БСТ-1;
е) клеммно-блочные соединители КБС 0 (для размножения общих то-
чек), КБС-1 (для соединения БП-1 , БУТ-10 , БУС-10 , БУМ-10) , КБС-2
(для дискретных цепей ввода – вывода БК-1 , БПР-10) , КБС-3 (для
аналоговых цепей ввода – вывода Бк-1); ж) межблочный соединитель
МБС для приборных цепей; з) резисторы нормирующие РН-1.
Рис. 1. Состав Ремиконта Р-130
Блок контроллера БГ-1 ведет обработку информации в цифровой
форме, организует программу всех алгоритмов управления, обеспечи-
вает программу обслуживания пульта настройки ПН-1 и лицевой пане-
ли ПЛ, извлекает нужные алгоритмы, “зашитые ” в памяти контролле-

4
ра. Эти алгоритмы объединяются в систему заданной конфигурации, в
них устанавливаются требуемые параметры настройки. С помощью
лицевой панели ПЛ и пульта настройки ПН-1 обеспечивается опера-
тивное управление до 4 контуров автоматического регулирования или
4 программ шагового управления объектами дискретного действия.
В блок контроллера БК-1 входят (см. рис. 1):
а) основная часть:
1) модуль контроля и программирования МКП;
2) модуль процессора ПРЦ10, имеющего непосредственную связь
с аккумуляторной батареей, состоящей из 3 шт. элементов D0,06D,
причем их конструктивное исполнение позволяет не нарушать эту
связь с целью сохранения памяти ПРЦ10 при извлечении модуля;
3) модуль стабилизированного напряжения МСН10, обеспечи-
вающий питанием весь контроллер БК-1 вместе с пультом настройки
ПН-1;
б) переменная часть:
1) модуль аналоговых сигналов МАС;
2) модуль аналоговых и дискретных сигналов МДА;
3) модуль дискретных сигналов МСД.
Число и вид входов – выходов УСО-А и УСО-Б определяются мо-
дификацией контроллера – двухразрядным десятичным кодом. Первая
цифра (старший разряд) кода модификации задает вид и число входов-
выходов для группы А, вторая – для группы Б. Например модификация
контроллера 15 означает: 1 – к УСО-А могут быть подключены 8 ана-
логовых входов и 2 аналоговых выхода (модуль МАС 8/2); 5 – к УСО-Б
можно подключить 8 дискретных входов – выходов и 8 дискретных
выходов (модуль МСД 8/8).
Основные технические характеристики.
1. Входы – выходы (количество входов – выходов и их вид опре-
деляются модификатором контроллера).
Аналоговые входные сигналы:
- унифицированные
0
–
5,
20
мА; 0 – 10 В
- термопары
ХА, ХК, ПП, ПР, ВР
- температуры сопротивления
ТСП, ТСМ
- гальваническая завязка
каждый вход гальванически
изолирован от других входов
и остальных цепей
- унифицированные
0-5
мА (Rн 2 к
Ω )