Файл: А.Е. Медведев Регулирующий микропроцессорный контроллер Р-130.pdf
ВУЗ: Кузбасский государственный технический университет
Категория: Методичка
Дисциплина: Электроника
Добавлен: 05.02.2019
Просмотров: 3445
Скачиваний: 8
45
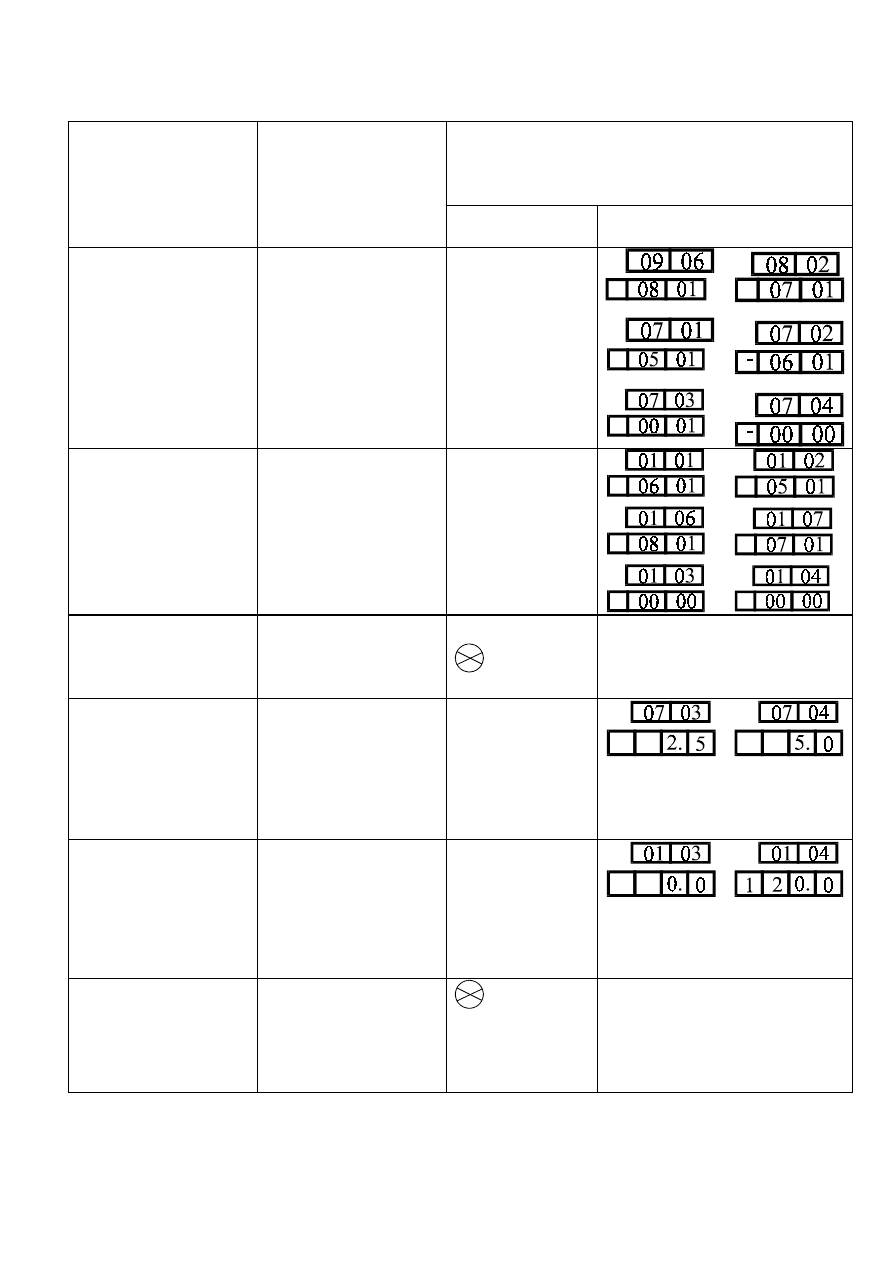
Продолжение табл. 15
Наименование
процедуры и
операции
Клавиши
Индикация
Световая
Цифровая
5.1.Конфигури-
рование функ-
циональных ал-
горитмов регу-
лятора
ВАА,
ЗДН, ПОР, РУЧ,
ДВБ.
“
↑” “∆” или “∇”
1)
3)
2)
5.2.Конфигури-
рование
алго-
ритма
опера-
тивного контро-
ля регулирова-
ния ОКО*
- // -
6.Выбор проце-
дуры
“Настр”
(настройка)
“
←” или “→”
НАСТР
6.1.Настройка
параметров ал-
горитма
ПОР
Хср=0,5%;
Х
∆
=0,25%
“
↑” “∆” или “∇”
6.2.Настройка
параметров ал-
горитма ОКО 01
W
0
=0;
W
100
=600
0
C*
- / / -
7.Переход в ре-
жим “Pабота”
“
↓” + “←”
РАБОТА
(мигающий
свет)
46
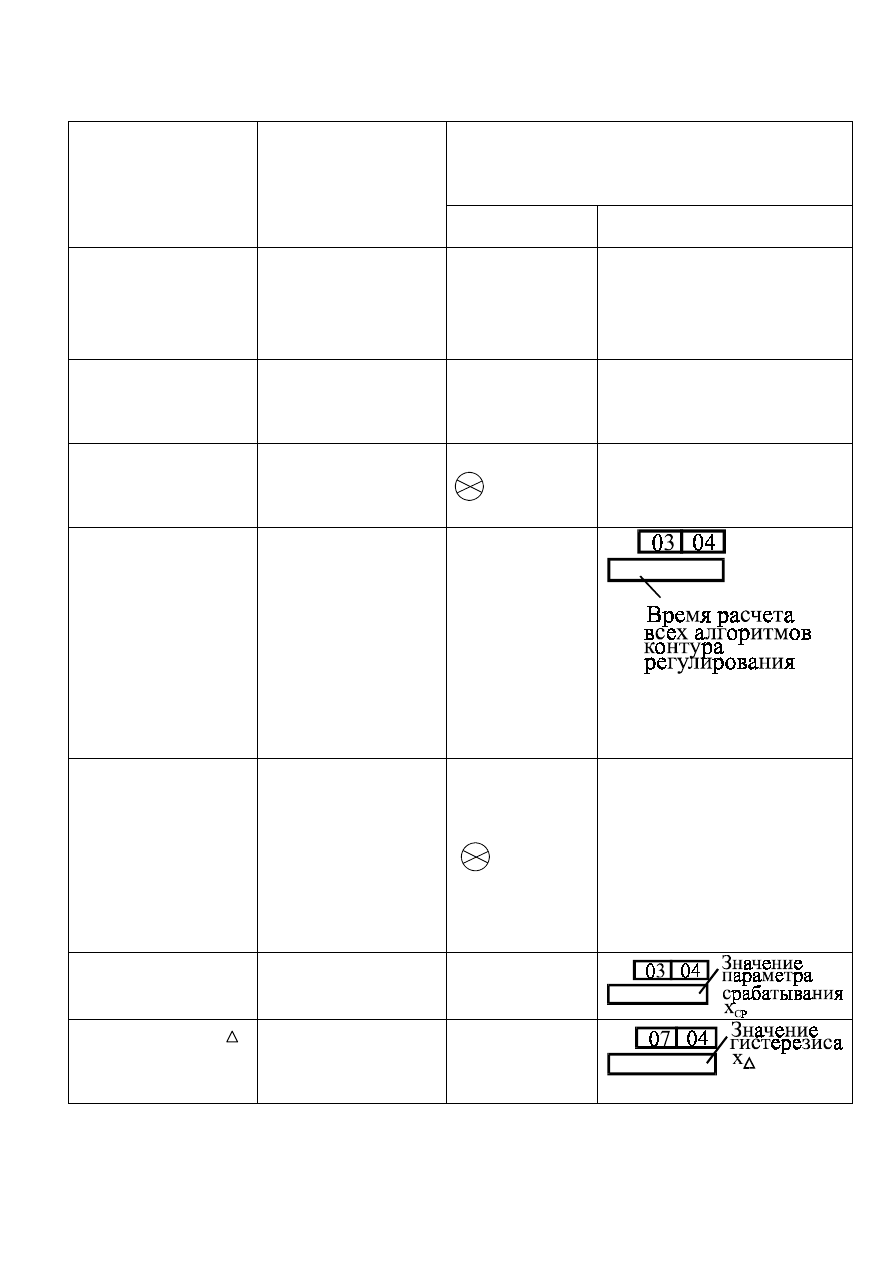
Продолжение табл. 15
Наименование
процедуры и
операции
Клавиши
Индикация
Световая
Цифровая
8.Контроль па-
раметров наст-
ройки в режиме
“Работы”
8.1.Контроль
времени цикла
Т
0
:
а)выбрать
процедуру
“Приб”
“
←” или “→”
ПРИБ
б)проконтроли-
ровать
Т
0
и
время
расчета
всех алгоритмов
(по
нижнему
ЦИ)
“
↑” “∆” или “∇”
8.2.Контроль
параметров
настройки
алгоритма ПОР
а)выбрать
процедуру
“Настр”
“
←” или “→”
НАСТР
б)проверить Хср
“
↑” “∆” или “∇”
в)проверить Х
- / / -
47
* Осуществить клавишей “
↑” ввод в память установленных пара-
метров в конце каждой процедуры (операции) очередным (последним)
ее нажатием. При этом на ЦИ останется лишь первый параметр данной
процедуры (операции).
После завершения программирования и контроля параметров в
режиме “Работа” отключить пульт ПН – 1 от лицевой панели (вынуть
вилку из гнезда разъема) и приступить к оперативному управлению ре-
гулятором с помощью лицевой панели (выбрать режим управления и
вид задания, проверить сигналы входа, задания и выхода регулятора и
др.).
Порядок работы с лицевой панелью контроллера:
1.Нажать клавишу “N” – выбрать контур регулирования 1.
2.По верхнему ЦИ проверить текущий сигнал задания .
3.С помощью клавиш “
←” или “→” вызвать последовательно сиг-
налы “вх” – входной (регулируемый параметр) и “вых” – выходной
сигнал (управляющее воздействием), проверить их вызов по загора-
нию соответствующего ЛИ, а числовое значение – по нижнему ЦИ, а
для сигнала “вых” – дополнительно по шкальному индикатору.
4.Клавишей “ ” перевести контур в режим “автоматическое
управление”, а комбинацией клавиш “ ” + “
↑” задать локальный ре-
жим регулятора.
5.Выбрать вид задания “ручное” нажатием клавиши “ ” (заго-
рится ЛИ “PЗ” ). Комбинацией клавиш “ ” + (“
∆” или “∇” ) устано-
вить требуемое значение задания (50 – 70
0
С).
6. АВТОМАТИЧЕСКОЕ ПРОГРАММНОЕ УПРАВЛЕНИЕ
В качестве объекта управления принята бетоносмесительная уста-
новка периодического действия содержащая два смесителя, механизм
загрузки смесителей, механизмы разгрузки смесителей.
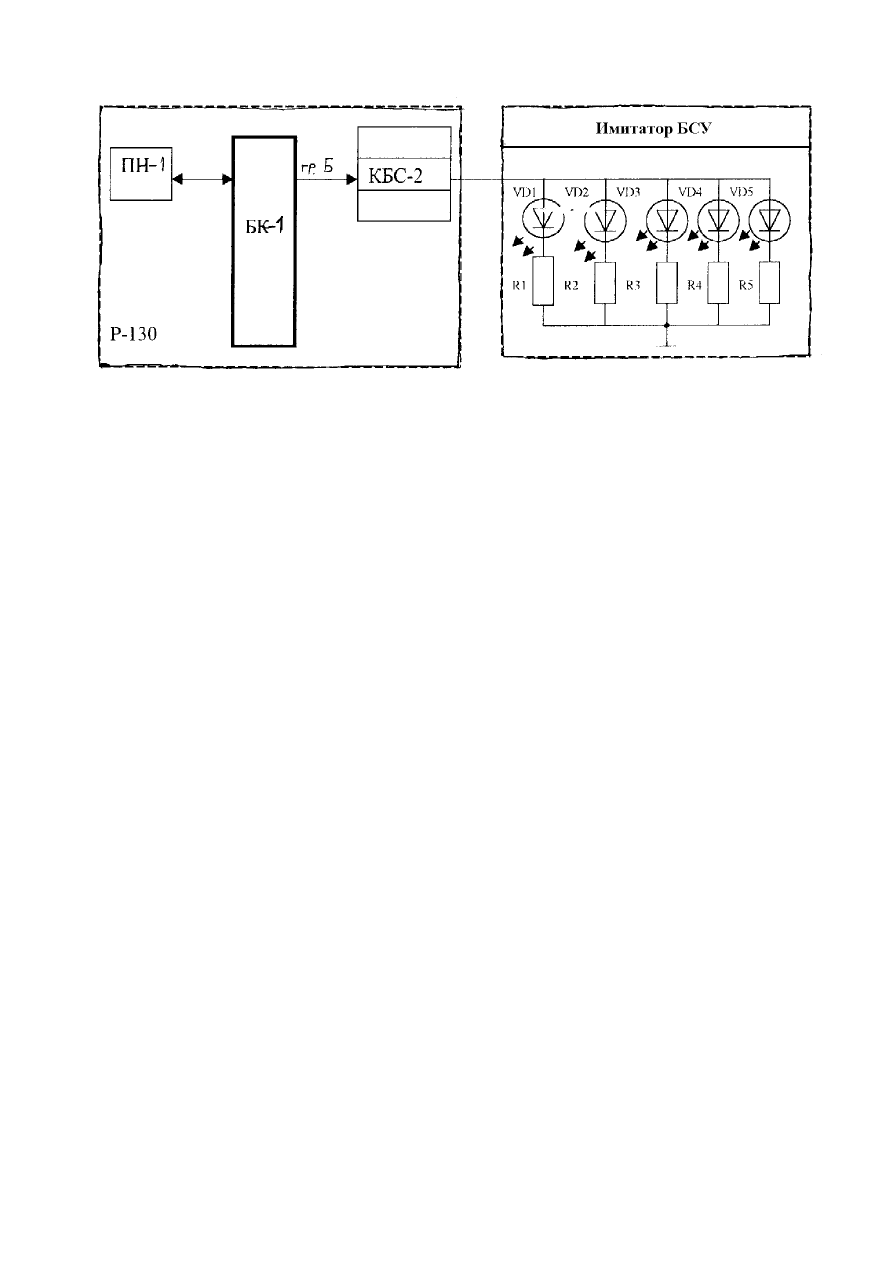
На рис. 10 представлена структурная схема системы автоматиче-
ского программного управления бетоносмесительной установкой
(БСУ). На стенде механизмы БСУ имитируются светодиодами VD1 –
VD5, подключаемым контроллером Р – 130 к источнику постоянного
тока 24 В через радиаторы R1 – R5.
48
Рис. 10. Структурная схема систем автоматического программно-
го управления механизмами БСУ
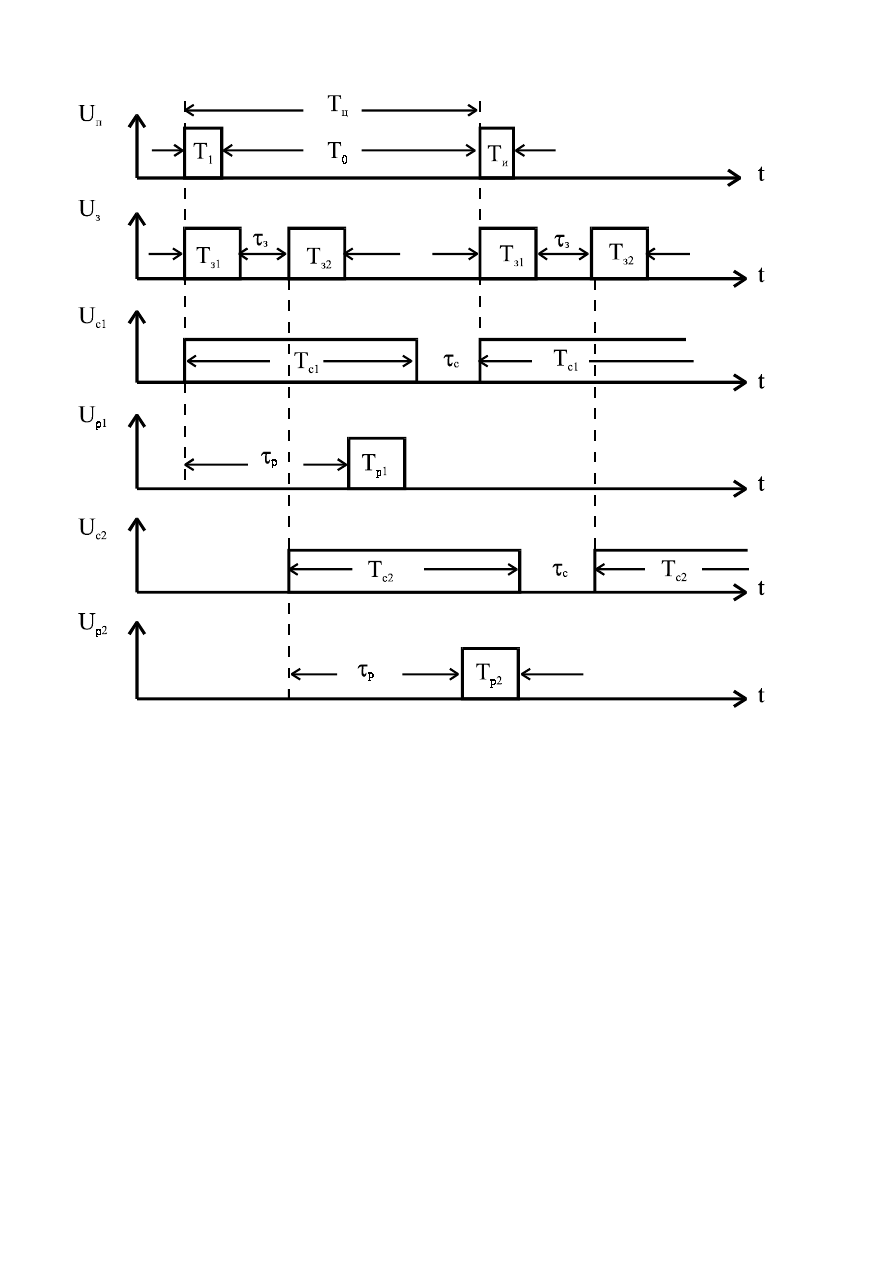
Программное управление БСУ предусматривает циклический ре-
жим работы, реализуемый в функции времени. В каждом цикле работы
смесителя (рис. 11) выполняются следующие рабочие операции: за-
грузка компонентов в смеситель, перемешивание компонентов и раз-
грузка смеси, причем загрузка и разгрузка компонентов происходит
при вращающемся барабане смесителя. Циклы работы смесителей
смещены во времени в связи с наличием только одного механизма их
загрузки.
Временные параметры настройки программного устройства: Тц –
длительность цикла; Т
1
, Т
0
– длительность пускового импульса и паузы
в цикле; Тз
1
, Тз
2
,
τз – соответственно, длительность работы механизма
загрузки при заполнении компонентами смесителей 1 и 2 и паузы меж-
ду загрузками; Тс
1
, Тс
2
,
τс – соответственно, длительность работы сме-
сителей и пауз между перемешиваниями; Тр
1
, Тр
2
– соответственно,
длительность разгрузки смесителей 1 и 2;
τр – задержка включения ме-
ханизма разгрузки относительно момента начала перемешивания ком-
понентов смеси.
49
Рис. 11. Временные диаграммы сигналов управления механизма-
ми БСУ:
Uп, Uз, Uс
1,
Uр
1
, Uс
2
, Uр
2
– сигналы управления, соответственно,
пусковой (команда начала цикла), механизмом загрузки, первым сме-
сителем, механизмом разгрузки первого смесителя, вторым смесите-
лем, механизмом разгрузки второго смесителя
Устройство программного управления БСУ в функции времени
(рис. 12) может быть выполнено на алгоритмах дискретного ввода в
ВДБ – 10 (команды пуск, стоп) и вывода ДВБ – 14 сигналов управления
механизмами БСУ, мультивибратора МУВ 84 (формирователь пуско-
вых сигналов), одновибраторов ОДВ 83 (формирователи сигналов
управления механизмами БСУ), логического ИЛИ 72 (объединение
сигналов управления механизмом загрузки в цикле), размещенных в
алгоблоках, соответственно, 10, 9, 11 – 21.