Файл: А.Е. Медведев Регулирующий микропроцессорный контроллер Р-130.pdf
ВУЗ: Кузбасский государственный технический университет
Категория: Методичка
Дисциплина: Электроника
Добавлен: 05.02.2019
Просмотров: 3443
Скачиваний: 8
10
4.2. Функциональные возможности Р-130
Контроллер рассчитан на прием и выдачу двух видов сигналов –
аналоговых и дискретных. Формирование импульсных сигналов на вы-
ходе импульсного вывода ИВА или ИВБ и эти сигналы поступают на
исполнительные механизмы через дискретные выходы контроллера.
Аппаратура оперативного управления (лицевая панель) рассчита-
на на оператора – технолога, который с ее помощью «ведет» техноло-
гический процесс.
Пульт настройки – это инструмент оператора – наладчика, с по-
мощью которого последний программирует контроллер, выполняет на-
стройку его параметров. Пульт и лицевая панель образуют интерфейс с
человеком.
Интерфейсный канал контроллера имеет приемо-передатчики,
преобразующие последовательный код в параллельный и обратно. Все
сигналы передаются через интерфейс последовательно, но скорость их
передачи достаточно велика для того, чтобы для процессов среднего и
низкого быстродействия можно было считать, что все сигналы пере-
даются одновременно.
Алгоблоки, реализуемые программно, образуют область управле-
ния контроллера. В исходном состоянии алгоблоки отсутствуют и ни-
какие функции по обработке сигналов контроллером не выполняются.
Алгоблок «появляется» в процессе программирования, когда в него
помещается тот или иной алгоритм.
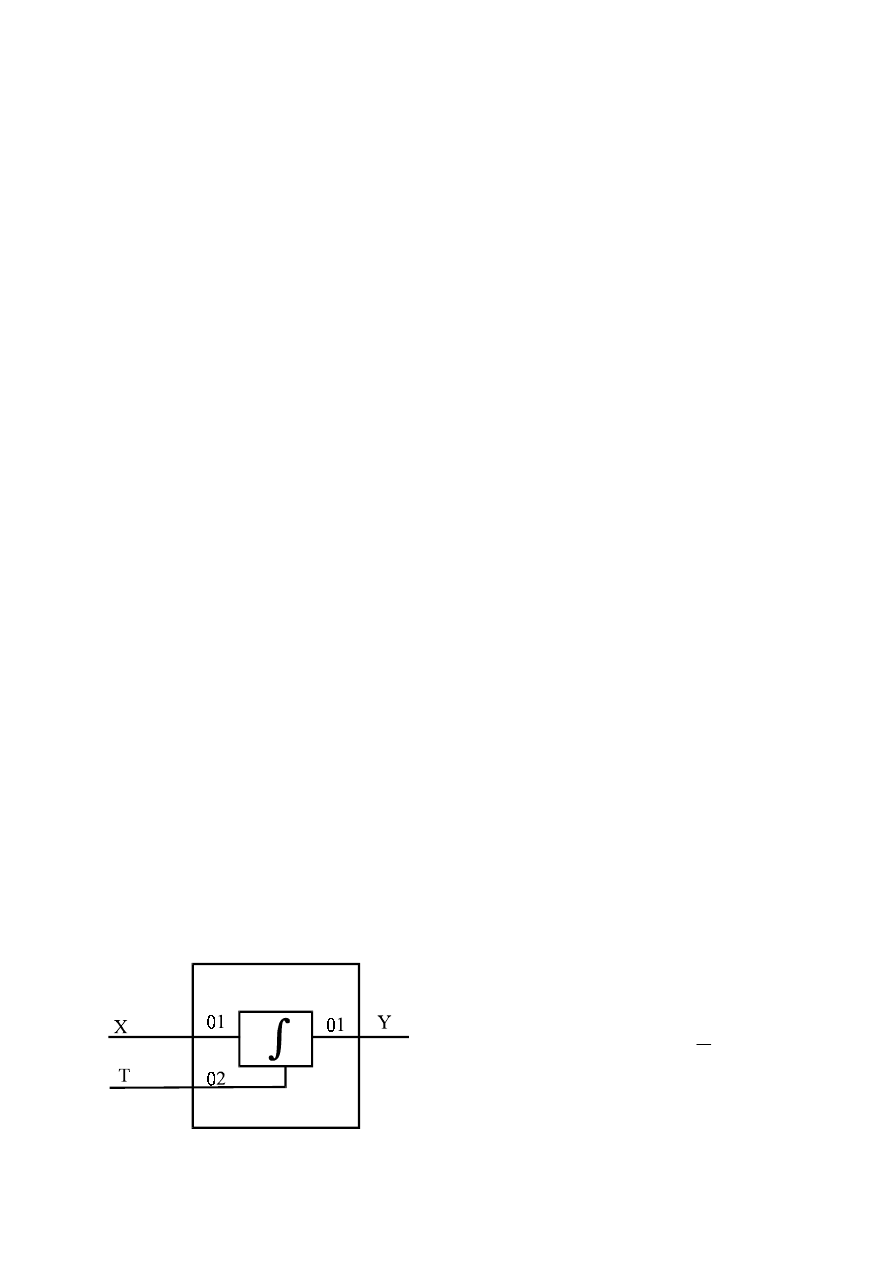
Входы алгоритма делятся на две группы: сигнальные (информа-
ционные) и настроечные. На первые входы подаются сигналы для об-
работки их в соответствии с назначением алгоритма, на вторые входы –
сигналы для установки параметров настройки алгоритма. Так сигнал Х,
поступающий на сигнальный вход интегратора (рис. 2), интегрируется,
а сигнал Т, поступающий на его настроечный вход, определяет посто-
янную времени интегрирования.
Рис. 2. Входы – выходы инте-
гратора: Х - сигнальный вход; Т -
настроечный вход;
Y
T
xdt
=
∫
1
- вы-
ход интегратора

11
Таким образом, все параметры настройки алгоритма задаются с
помощью сигналов, поступающих на настроечные входы алгоритма.
Все входы алгоритма, как сигнальные, так и настроечные, имеют
сквозную нумерацию от 01 до 99. Выходы алгоритма нумеруются от 01
до 25.
В общем случае библиотечный алгоритм имеет три реквизита:
а) библиотечный номер (от 00 до 99); б) модификатор М, определяю-
щий дополнительные свойства алгоритма (число однотипных опера-
ций, которые может выполнить один алгоритм, число участков про-
граммы и т.п.). Ряд алгоритмов модификатора не имеют; в) масштаб
времени МВ (для алгоритмов, чья работа связана с реальным време-
нем). Если контроллер настроен на младший диапазон времени, то МВ
индивидуально в каждом алгоблоке задает «секунды» или «минуты».
Для старшего диапазона МВ задают «минуты» или «часы».
Правила размещения алгоритмов в алгоблоках:
1) любой алгоритм можно помещать в любой алгоблок;
2) один и тот же алгоритм можно помещать в разные алгоблоки
(использовать многократно), кроме алгоритмов оперативного контроля
ОКО и ОКЛ, которые могут помещаться только первые четыре алгоб-
лока (с номерами 01...04).
Для некоторых алгоритмов имеется ограничение на краткость их
использования, в частности для алгоритмов ввод – вывод информации
(повторное их использование лишено смысла).
Для построения управляющей структуры на базе Р-130 осуществ-
ляют конфигурацию алгоблоков (организуют между ними программ-
ным способом связи). Для каждого входа каждого алгоблока задается
источник сигнала. Каждый вход алгоблока может находиться в одном
из двух состояний:
1) связанном (вход не соединим с выходом алгоблока);
2) свободном (вход не соединим с выходом алгоблока).
На свободных входах сигналы могут устанавливаться оператором
в процессе настройки. Сигналы на свободных входах могут представ-
лять: а) константы (устанавливаются и изменяются только в режиме
программирования; б) коэффициенты (их можно устанавливать и из-
менить как при программировании, так и при работе контроллера, что
позволяет осуществить также их подстановку).
Для связанных входов в процессе программирования должны
быть заданы номер алгоблока и номер выхода, с которым данный вход

12
будет связан при конфигурировании, а для свободных входов – являет-
ся ли сигнал константой или коэффициентом. Если свободен настроен-
ный вход, то можно вручную установить параметры настройки.
Сигнал на любом входе алгоблока можно инвертировать. Это оз-
начает для непрерывных сигналов смену знака, а для дискретных – из-
менение состояния (замену 1 на 0 и 0 на 1). Инвертирование позволяет,
например, таймер не передним, а задним фронтом сигнала и т.д.
Возможности конфигурирования (связи) алгоблоков определяют-
ся тремя правилами:
1) любой вход любого алгоблока можно связать с любым выходом
алгоблока или оставить его свободным;
2) на любом свободном входе любого алгоблока можно вручную
задавать сигнал в виде константы или коэффициента;
3) на любом входе любого алгоблока сигнал можно инвертиро-
вать.
В несходном состоянии все входы алгоблоков являются свобод-
ными, инверсия отсутствует.
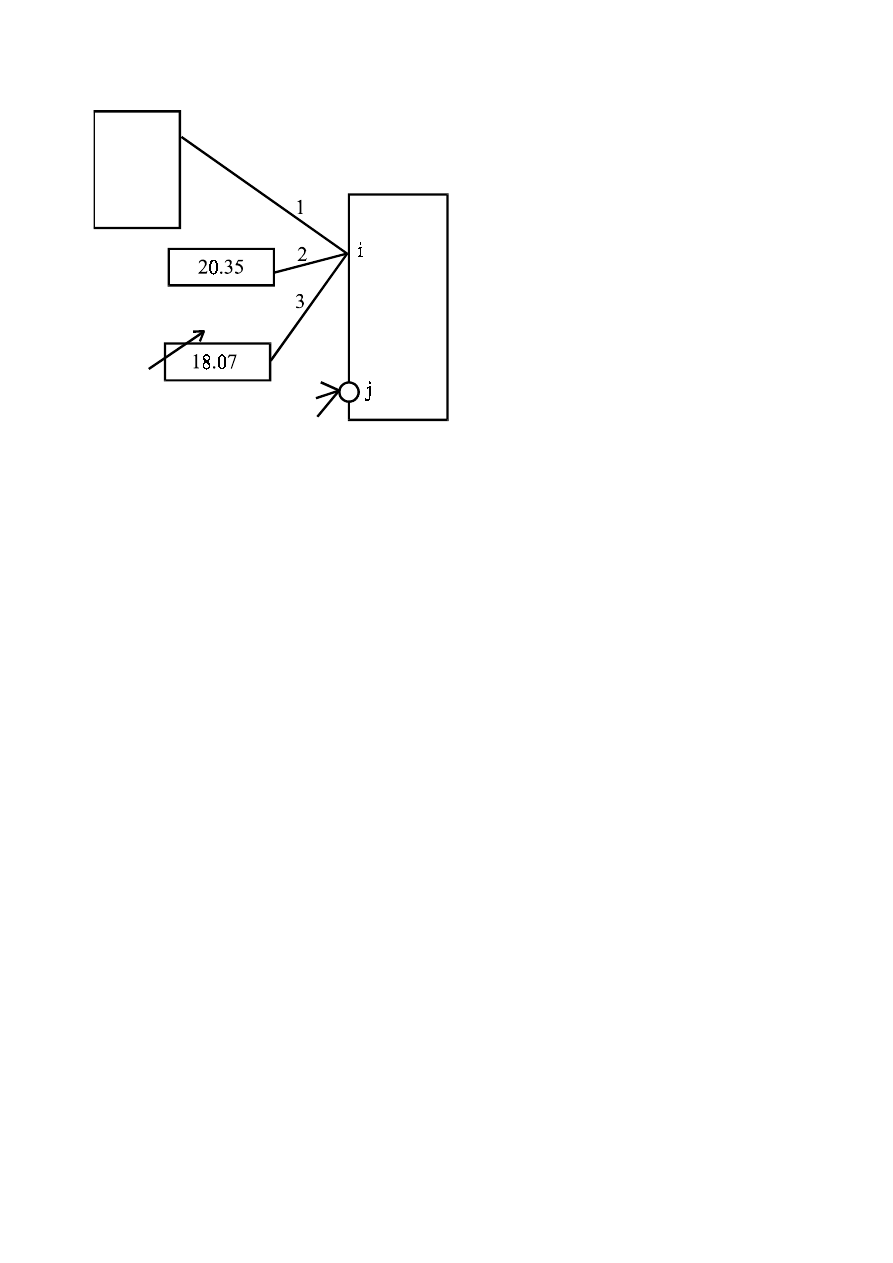
На рис. 3 представлены варианты конфигурирования.
На входе i сигнал не инвертируется, а на входе j –инвертируется.
Алгоблоки могут обрабатывать разнообразные информационные
сигналы (аналоговые, дискретные, временные, числовые) и иметь на
строчных входах различные сигналы, задающие параметры настройки
(масштабный коэффициент пропорциональности, скорость изменения
аналоговых сигналов, длительность импульса, технические единицы).
Аналоговые сигналы формируются на выходе таких алгоритмов,
как регуляторы, сумматоры, задатчики, интеграторы и т.д. К аналогич-
ным сигналам относятся также такие параметры настройки, как порог
срабатывания нуль - органа, уровень ограничения и т.п. Несмотря на
то, что на аналоговых входах и выходах контроллера сигнал меняется в
диапазоне 0-100 %, на выходе алгоблоков аналоговый сигнал может
изменяться в более широком диапазоне (от –199,9 до 199,9%). Это по-
зволяет, например, складывать два числа, каждое из которых равно
90%, и на выходе сумматора получить правильный результат. Если ре-
зультат каких-либо вычислений оказывается больше 199,9 или меньше
– 199,9%, то сигнал на выходе алгоблока ограничивается значениями
соответственно 199,9 или – 199,9%.
13
Временные сигналы форми-
руются на выходе таймеров, про-
граммных задатчиков, одновиб-
раторов и т.п. алгоритмов. К
временным сигналам относятся
такие параметры настройки, как
постоянные времени, протяж-
ность участка, время выдержки и
т.п. В контроллере предусмотре-
ны три размерности для времен-
ных сигналов: секунды, минуты
и часы. Конкретная размерность
задается двумя параметрами:
диапазоном и масштабом. Диапа-
зон (младший или старший) за-
дается для всего контроллера в
целом, т.е. одновременно для
всех его алгоблоков. В пределах одного диапазона индивидуально в
каждом алгоблоке задается один из двух масштабов времени – млад-
ший или старший. Если в контроллере задан младший диапазон, то в
каждом алгоблоке можно задать масштаб секунды или минуты, для
старшего диапазона можно задать минуты и часы.
Числовые сигналы – это сигналы на выходе счетчика или других
алгоритмов, работа которых связана с отсчетом событий.
Числовыми могут быть и параметры настройки, например, число
может задать граничное значение сигнала на выводе счетчика, номер
этапа, к которому должна перейти логическая программа и т.п.
Дискретные сигналы обычно обрабатываются логическими алго-
ритмами и алгоритмами, связанными с переключением сигналов. Од-
нако дискретными могут быть и параметры настройки. Например, дис-
кретные сигналы в алгоритме задания определяют, должна ли выпол-
няться статическая или динамическая балансировка.
Масштабный коэффициент - это параметр настройки ряда алго-
ритмов, где требуется масштабирование сигналов. Так, этот коэффи-
циент используется в алгоритмах аналогового ввода и вывода, алго-
ритме суммирования с масштабированием и т.п.
Коэффициент пропорциональности используется в основном в ал-
горитмах регулирования.
Рис. 3. Конфигурационные воз-
можности: 1- вход i связан с выхо-
дом алгоблока; 2 - на входе i зада-
ны константы; 3 - на входе i задан
коэффициент
14
Скорость изменения аналоговых сигналов – это параметр на-
стройки, задающий, например, скорость изменения при динамической
балансировке или задающий ограничение скорости в алгоритме огра-
ничения скорости. Размерность для этого параметра определяется так
же, как и для временных сигналов.
Длительность импульса – это параметр настройки алгоритма им-
пульсного вывода. Этот параметр задает минимальную длительность
импульса, формируемого импульсным регулятором.
Длительность импульса всегда отсчитывается в секундах и не за-
висит от временного диапазона, на который настроен контроллер.
Технические единицы – это параметры настройки алгоритма опе-
ративного контроля. С помощью этих параметров задается формат
числа, в котором контролируемые параметры (задание, рассогласова-
ние и т.д.) выводятся на индикаторы лицевой панели.
Текущее значение индицируемого параметра определяется в тех-
нических единицах из формулы
W
инд
= W
0
+ (W
100
– W
0
)/100X,
где W
0
, W
100
– значения параметров настройки алгоритма Око 01, соот-
ветствующие 0% и 100% аналогового сигнала.
При конфигурировании алгоблоков разнотипность сигналов на
соединяемых входах и выходах не является препятствием для их со-
единения. Единственное, что необходимо при этом учитывать, - это
взаимное соответствие диапазона изменения различных сигналов. На-
пример, если временной вход 06 программного задатчика связать с
аналоговым выходом 01 сумматора (рис. 4,а), то протяженность во
времени первого участка программы Т1 будет определяться сигналом
на выходе сумматора Y согласно соотношению Т1 (ч, мин, с) 4,096
Y%. Например, если Y= 100% и у программного задатчика выбрана
размерность времени «минуты»; то Т1 =409,6 мин.
Взаимное соответствие имеется не только между непрерывными
сигналами, но и между непрерывными сигналами, с одной стороны, и
дискретными - с другой. Если, например, вход сумматора связать с вы-
ходом логического алгоритма (см. рис 4,б), то при изменении сигнала
на выходе последнего с нуля на единицу сигнал на выходе сумматора
будет дискретно изменяться с -100% на 100%.