ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 06.12.2023
Просмотров: 67
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Министерство науки и высшего образования Российской Федерации
Федеральное государственное бюджетное образовательное
учреждение
ИРКУТСКИЙ НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
ИНСТИТУТ АВИАМАШИНОСТРОЕНИЯ И ТРАНСПОРТА
Кафедраконструированияистандартизациивмашиностроении
наименование кафедры
Допускаю к защите Руководитель Кузнецов Н. К.
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
К КОНТРОЛЬНОЙ РАБОТЕ ПО ДИСЦИПЛИНЕ
Теориямеханизмовимашин
Выполнил студент группы: НДДбз 17-1 Щвецов Р.А.
Нормоконтролер Кузнецов Н. К. Контрольная работа защищена с оценкой
Иркутск 2020 г.
Оглавление
Введение 3
Задание 4
-
Структурный анализ рычажного механизма 5-
Описание механизма 5 -
Степень подвижности механизма 6 -
Структурные группы механизма 7
-
-
Кинематический анализ механизма 9-
Определение размеров звеньев механизма 9 -
Построение кинематической схемы механизма 9 -
Построение планов скоростей механизма 10 -
Построение планов ускорeний механизма 12 -
Построение кинематических диаграмм 15-
Построение диаграммы перемещения 15 -
Построение диаграммы скоростей 16 -
Построение диаграммы ускорений 17 -
Определение погрешности двух методов нахождения скоростей и ускорений 18
-
-
-
Силовой анализ механизма 20-
Определение сил тяжести звеньев 20 -
Определение сил инерции звеньев 20 -
Определение реакций в структурной группе 2-3 21 -
Силовой расчет ведущего звена 1 24 -
Рычаг Жуковского 25 -
Сравнение значений уравновешивающей силы 27
-
Заключение 28
Список использованной литературы 29
Введение
Курсовой проект по дисциплине «Теория механизмов и машни» предусматривает исследование механизма по трем основным разделам:
-
структурный анализ -
кинематический анализ -
кинетостатический анализ
Результатом структурного анализа является определение его класса, по которому в дальнейшем можно выбрать методы его последующих исследований. Помимо того, также определим класс кинематических пар в составе механизма и его подвижность.
Кинематический анализ предусматривает расчет кинематических характеристик. В данном разделе строятся положения механизма в различные моменты времени, рассчитываются скорости, ускорения, перемещения точек и звеньев. Расчеты ведутся методом планов (т.е. решение уравнений векторным способом) и методом кинематических диаграмм.
Силовое исследование механизма основывается на принципе Д’ Аламбера. При котором к статически определяемой структурной группе помимо действующих внешних сил добавляют силы инерции и рассматривают эту группу Ассура, как находящуюся в равновесии. Кинетостатический расчет проводится методом планов сил, а в качестве результата определяется уравновешивающий момент на ведущем звене механизма.
Задание
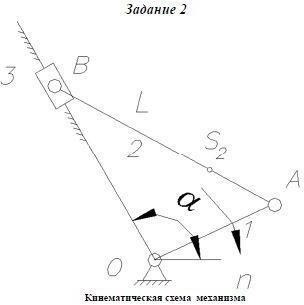
Рис. 0.1 Задание
Кинематическая схема рычажного механизма представлена на Рис. 0.1. Табл. 0.1. Размеры звеньев
| Наименование параметра и величина | Обозначение |
| n, об/мин | 2200 |
| S, мм | 98 |
| α, град | 90 |
| λ=R/l | 0,191 |
-
Структурный анализ рычажного механизма
-
Описание механизма
Кинематическая схема механизма представлена на Рис. 1.1. На схеме обозначено: 1 – кривошип , 2 – шатун, 3 - ползун, 0 – неподвижное звено механизма стойка). Стрелкой показано направление угловой скорости ω1.
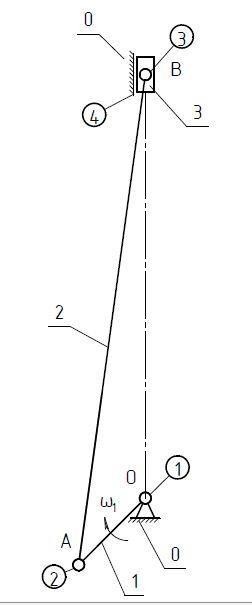
Рис. 1.1 Схема механизма
Механизм представляет собой 4-хзвенный плоский рычажный механизм. Кинематическая схема механизма показана на Рис. 1.1:
звено 1 –кривошип равномерно вращается вокруг неподвижной оси Oz (Рис. 1.1.);
звено 2 – шатун совершает плоскопараллельное движение;
звено 3 – ползун, совершает возвратно-поступательное движение; звено 0 – стойка неподвижна (неподвижный шарнир O; неподвижные
направляющие ползуна 3).
КИНЕМАТИЧЕСКИЕ ПАРЫ – подвижные соединения двух звеньев, обозначены на схеме (Рис. 1.1) заглавными латинскими буквами с индексами, в которых цифра указывает подвижность КП, буква (русская) – вид относительного движения (в -вращательное, п - поступательное).
Табл. 1.1
| № п/п | Звенья КП | Вид КП | Подвижность КП | Класс КП | Расположение в группе | |
| плоскость | простр. | |||||
| 1 | 1-0 | В | 1 | 1 | V | внешняя |
| 2 | 1-2 | В | 1 | 1 | V | внутренняя |
| 3 | 2-3 | В | 1 | 1 | V | внутренняя |
| 4 | 3-0 | П | 1 | 1 | V | внешняя |
Все четыре пары обеспечивают контакт по поверхности и поэтому относятся к низшим парам.
По числу связей в КП имеем
-
кинематических пар V класса p5= 4, -
кинематических пар IV класса p4= 0.
-
Степень подвижности механизма
Степень подвижности механизма W определяется по формуле Чебышева:
| W = 3×n − 2×p5− p4 | (1) |
где n – число подвижных звеньев, p5– число кинематических пар V класса, p4–число кинематических пар IV класса.
В данном механизме в результате проведенного выше исследования получено
n =3; p5= 4; p4= 0.
Степень подвижности данного механизма по формуле (1)
W =3×3 −2× 4-0 =1,
т.е. механизм имеет одно начальное звено.
-
Структурные группы механизма
Рычажный механизм состоит из первичного механизма 1-го класса и двухповодковых групп (диад и групп 2-го класса).
Структурный анализ начинают с групп наиболее удаленных от первичного механизма.
1. Группа Ассура 2–3– шатун 2 и ползун 3 (Рис. 1.2) – представляют собой двухповодковую группу или диаду второго вида, с двумя вращательными парами B1В и A1В и одной поступательной B1П .
Число подвижных звеньев в группе n =2.
Число кинематических пар в группе
p5=3;. p4=0.
Степень подвижности диады
W23 = 3×2 − 2×3−0=>W23= 0
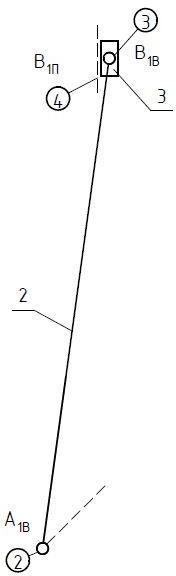
Рис. 1.2 Структурная группа Ассура 2-3
3. Первичный механизм (Рис. 1.3) – звено 1 (кривошип OA), соединенное шарниром A и со стойкой 0.
Число подвижных звеньев n =1.
Число кинематических пар p5=1, p4=0. Степень подвижности механизма 1-го класса
W1= 3×1 − 2×1−0=>W1=1
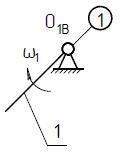
Рис. 1.3 Начальное звено
Механизм состоит из механизма первого класса и двух групп Ассура второго класса 2-го порядка. Следовательно, в целом механизм относится к механизму второго класса.
-
Кинематический анализ механизма
-
Определение размеров звеньев механизма
Длина кривошипа OA будет равна:
 S lOA= 2 =
S lOA= 2 =0,098
 2 =0,049 м
2 =0,049 мДлина шатуна 2 будет равна:

l = lOA = 0,049 =0,257 м
AB λ 0,191
Положение центра масс звеньа 2:
lAS2=0,35∙lAB=0,35∙0,257=0,09 м
-
Построение кинематической схемы механизма
Выбираем масштаб длин µl. Пусть радиусу кривошипа lOA=0,049 м соответствует на чертеже отрезок OA= 32,67 мм. Тогда масштаб построения
будет равен:
µ = lOA⁄ = 0,049 = 0,0015 м⁄мм
l OA ⁄32,67
Вычисляем чертежные размеры. Длина шатуна 2:
AB= lAB⁄ = 0,257 =171,33 мм
µl ⁄0,0015
Расстояние до центров масс звеньев: