Файл: Курсовая работа по дисциплине Общая и прикладная теория автоматического управления на тему Анализ и синтез динамики следящей системы.docx
Добавлен: 06.12.2023
Просмотров: 116
Скачиваний: 3
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
 .
. Заданные параметры являются параметрами основных элементов, из которых состоит следящая система, используя эти параметры необходимо провести анализ динамики следящей системы и в случае невыполнения желаемых показателей качества провести синтез корректирующего звена, которое обеспечивает желаемые показатели качества следящей системы.
2. Математическая модель следящей системы
Математическая модель – математическое представление реальности, один из вариантов модели, как системы, исследование которой позволяет получать информацию о некоторой другой системе.
Процесс построения и изучения математических моделей называется математическим моделированием.
-
Функциональная схема следящей системы
Функциональная схема – вид графической модели системы. Их использование и построение позволяет наглядно отразить функции выполняемые каждым устройством в системах автоматического управления. Для следящей системы функциональная схема приведена на рис 2:
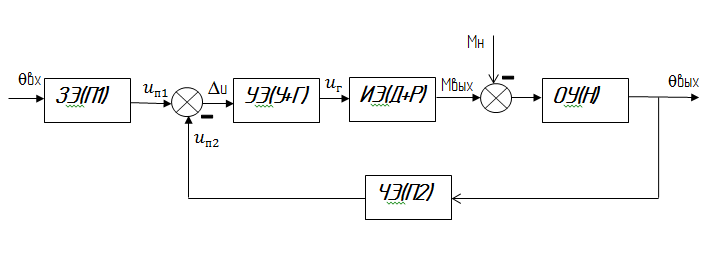
Рис.2 – Функциональная схема следящей системы
-
Уравнения движения следящей системы
Составим математические модели каждого элемента согласно схеме, приведенной на рис. 2
а) Уравнения потенциометров:


 где
где =
=  – напряжения на потенциометрах П1 и П2 соответственно;
– напряжения на потенциометрах П1 и П2 соответственно;  – задающий и выходной углы поворота валов следящей системы;
– задающий и выходной углы поворота валов следящей системы;  – коэффициенты передачи потенциометров.
– коэффициенты передачи потенциометров.б) Уравнение элемента сравнения
 .
.При условии, что
 , имеем
, имеем
 – напряжение подаваемое на усилитель;
– напряжение подаваемое на усилитель;  и
и  - напряжения на П1 и П2 соответственно;
- напряжения на П1 и П2 соответственно;  входного и выходного углов поворота валов системы.
входного и выходного углов поворота валов системы.в) Уравнение усилителя имеет вид

где
 – напряжение на усилителе;
– напряжение на усилителе; 
г) Уравнение генератора запишем в виде
 – сопротивление и ток обмотки возбуждения;
– сопротивление и ток обмотки возбуждения; 
д) Уравнения электродвигателя:
 – ток якоря электродвигателя,
– ток якоря электродвигателя,  – угловая скорость вращения вала двигателя,
– угловая скорость вращения вала двигателя,  – момент, развиваемый двигателем,
– момент, развиваемый двигателем,  – напряжение, вырабатываемое генератором,
– напряжение, вырабатываемое генератором,  и
и  – индуктивность и сопротивление обмотки якоря.
– индуктивность и сопротивление обмотки якоря.е) Уравнение нагрузки имеет вид
 =
=  ,
, – возмущающий момент на входном валу,
– возмущающий момент на входном валу,  – момент инерции нагрузки,
– момент инерции нагрузки, 
угловая скорость выходного вала,

ж) Уравнения редуктора запишем в следующей упрощенной форме

где n
 передаточное число редуктора.
передаточное число редуктора.з) Уравнение связи между углом поворота и угловой скоростью имеет вид
Таким образом, общаясистема уравнений следящей системы имеет следующий вид:
 (1)
(1)2.3 Передаточные функции элементов следящей системы
Система уравнений следящей системы в операторной форме выглядит следующим образом:
 (2)
(2)2.4 Структурная схема следящей системы
По функциональной схеме, приведенной на рис. 2, и передаточным функциям элементов составим исходную структурную схему следящей системы.
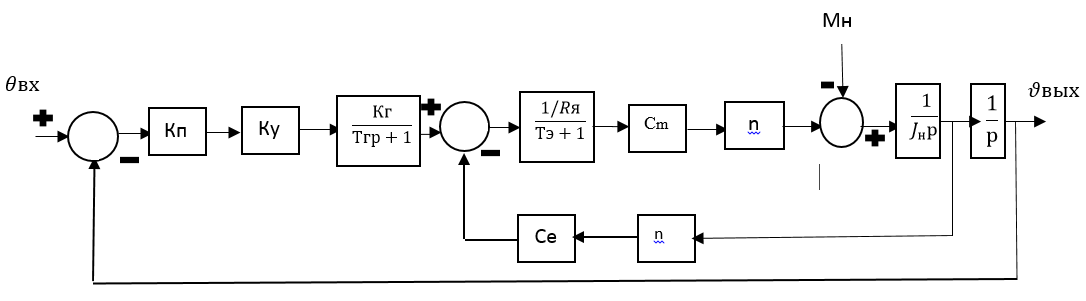
Рис. 2.1 – Структурная схема следящей системы
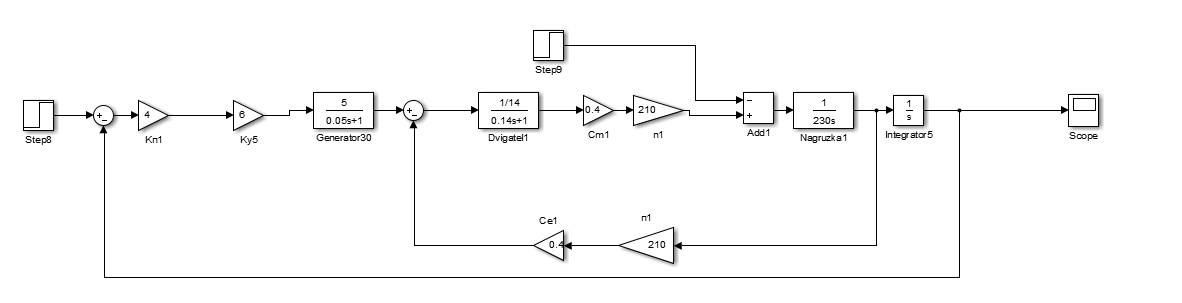
Рис. 2.2 – Структурная схема следящей системы Mathlab
Выполним преобразование структурной схемы. Перенесем возмущающий момент сил на сумматор местной обратной связи (рис. 2.3).
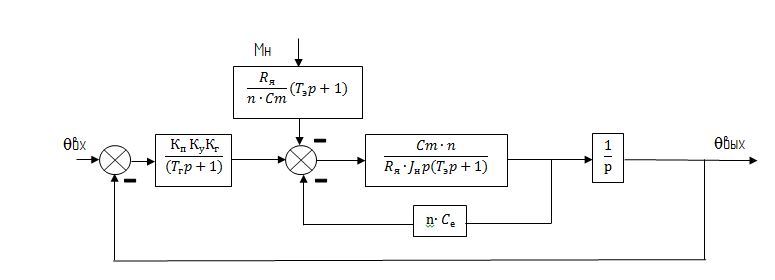
Рис. 2.3 – Преобразованная структурная схема
Упростим структурную схему рис.2.3, обозначим
 =
=  и будем считать
и будем считать 
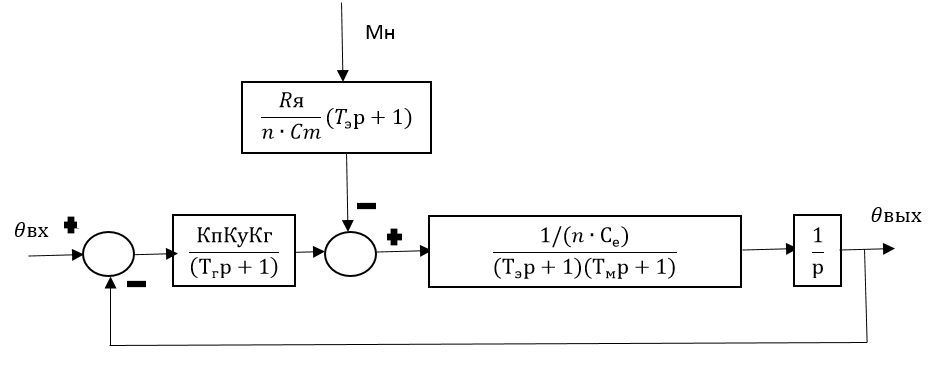
Рис. 2.4 – Упрощенная структурная схема
Перенесем возмущающий момент сил
 на вход (рис.2.5):
на вход (рис.2.5):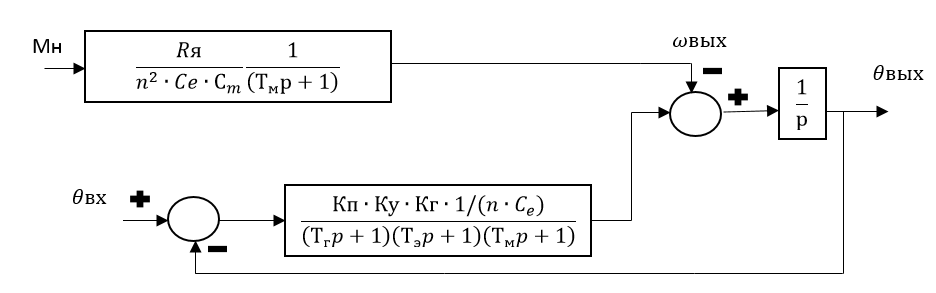
Рис.2.5
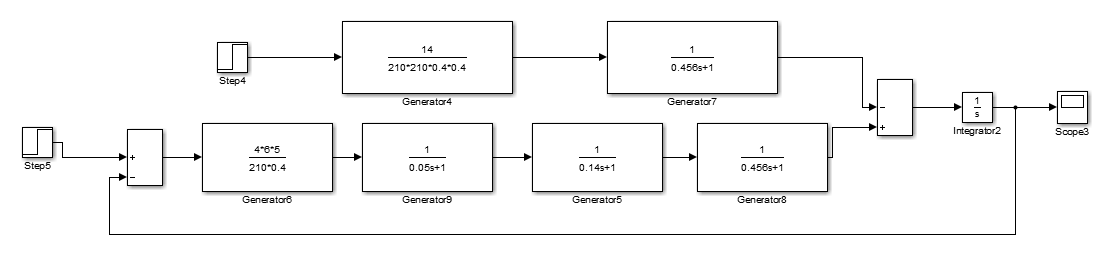
Рис.2.6
В задании варианта 4 необходимо исследовать влияние возмущающего момента сил
=1∙(t) на угол поворота выходного вала  . Для этого обнулим входной угол
. Для этого обнулим входной угол  = 0 , тогда структурная схема примет вид (рис. 2.7):
= 0 , тогда структурная схема примет вид (рис. 2.7):
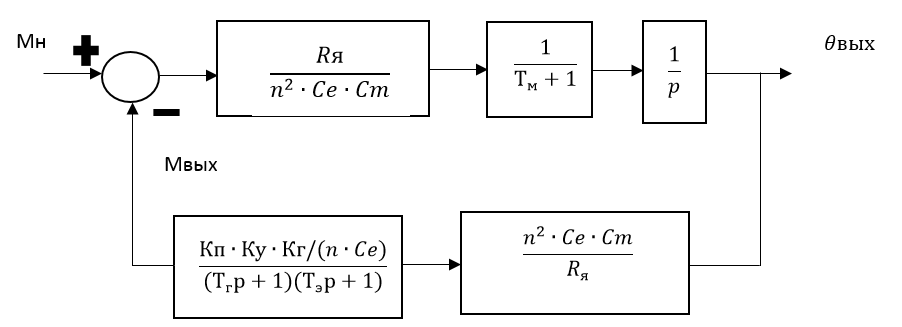
Рис. 2.7
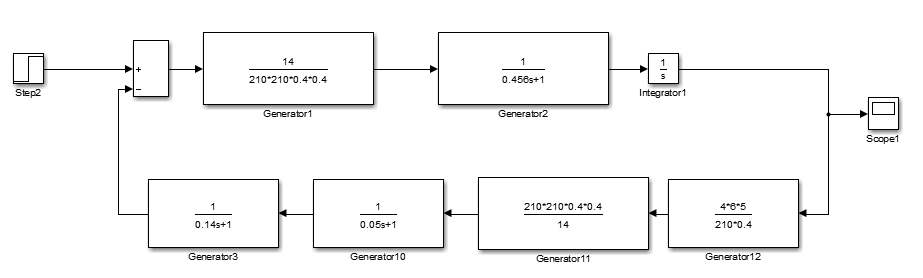
Рис.2.8
Упростим структурную схему (рис.2.9):
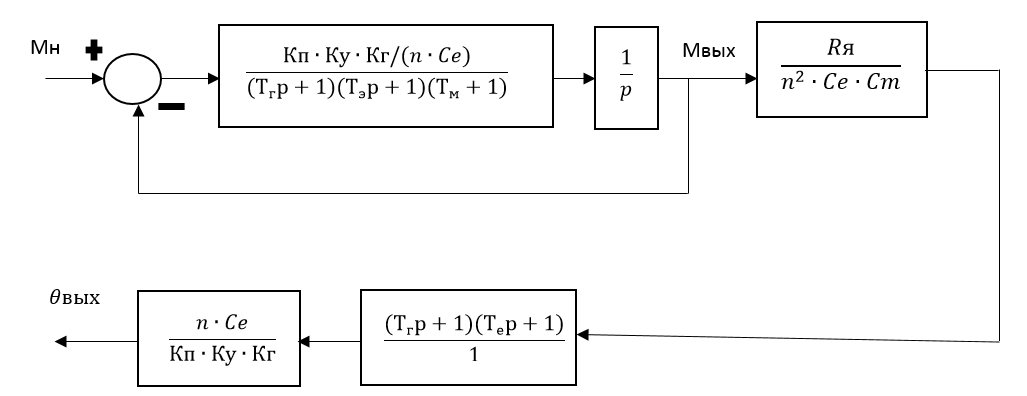
Рис. 2.9
Сократим всё необходимое, заменим
 =
=  , обозначим
, обозначим  =
=  и получим схему для исследования влияния возмущающего момента сил
и получим схему для исследования влияния возмущающего момента сил  на угол поворота выходного вала (рис.2.8).
на угол поворота выходного вала (рис.2.8).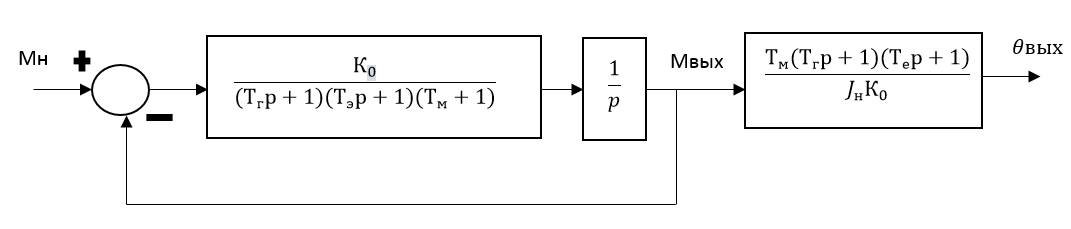
Рис. 2.10 – Структурная схема для исследования влияния возмущающего момента сил
на угол поворота выходного вала  (t)
(t)
Рис. 2.11 – Структурная схема для исследования влияния возмущающего момента сил
на угол поворота выходного вала в программе MathlabИспользуя структурную схему, представленную на рис. 2.11, запишем три передаточные функции.
Передаточная функция разомкнутой следящей системы
 :
:  =
=  ; (3)
; (3) Передаточная функция замкнутой следящей системы по моменту
 : =
: = =
= 