Файл: Минимальный курс физики. Составлен доц. Юнусовым Н. Б.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 10.01.2024
Просмотров: 358
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
СОДЕРЖАНИЕ
КИНЕМАТИ
Минимальный курс физики.
Составлен доц. Юнусовым Н.Б.
ОГЛАВЛЕНИЕ. Стр.
Физика, ч.1. 2
(Физические основы механики. Механические колебания и волны.
Молекулярная физика и термодинамика).
-
1.1. Основы кинематики. 2 -
1.2. Основы динамики. 4 -
1.3. Законы сохранения в механике. 6 -
1.4. Механика твердого тела. 8 -
1.5. Релятивистская динамика. 11 -
1.6. Механические колебания. 13 -
1.7. Механические волны. 16 -
1.8. Основы молекулярно-кинетической теории. 17 -
1.9. Функции распределения Максвелла и Больцмана. 20 -
1.10. Основы термодинамики. 21
Физика, ч.2. 29
(Электростатика. Электродинамика. Электромагнетизм.
Электромагнитные колебания и волны).
2.1. Электрическое поле в вакууме. 29
2.2. Электрическое поле в веществе. 33
2.3. Электрический ток. 37
2.4. Магнитное поле в вакууме. 42
2.5. Магнитное поле в веществе. 49
2.6. Основы теории электромагнитного поля. 52
2.7. Электромагнитные колебания. 55
2.8. Электромагнитные волны. 57
Физика, ч.3. 58
(Волновая и квантовая оптика. Основы квантовой механики.
Физика атома и твердого тела. Физика ядра и элементарных частиц).
3.1. Интерференция и дифракция света. 58
3.2. Поляризация и дисперсия света. 62
3.3. Тепловое излучение. 66
3.4. Фотоэффект. Эффект Комптона. Давление света. 68
3.5. Основные положения квантовой механики. 69
3.6. Квантовая теория атома. 74
3.7. Элементы физики твердого тела. 80
3.8. Ядро атома. 81
3.9. Элементарные частицы. 85
ФИЗИКА. Часть 1.
-
ОСНОВЫ КИНЕМАТИКИ.
Кинематика поступательного движения.
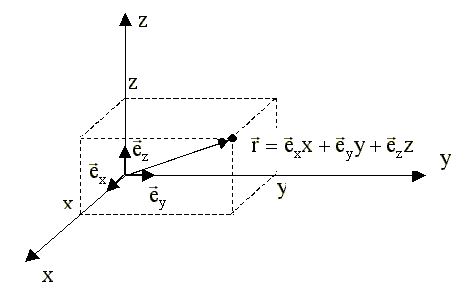
Простейшая форма движения материи – механическое движение, т.е. изменение положения материальных тел в пространстве и во времени. Кинематика изучает движение тел без рассмотрения причин, его вызывающих. Простейшей физической моделью тела является материальная точка – тело, размерами которого в условиях данной задачи можно пренебречь. Для описания движения материальной точки необходима система отсчета: часы для отсчета времени и система координат (обычно выбирают прямоугольную декартову систему координат). Положение материальной точки в момент времени tопределяется координатами х, у, z или радиус-вектором
. Модуль и направление радиус-вектора определяются тремя его проекциями на оси координат:
 В процессе своего движения точка описывает некоторую линию, называемую траекторией.Расстояние, пройденное материальной точкой по траектории, представляет собой путьs. Вектор
В процессе своего движения точка описывает некоторую линию, называемую траекторией.Расстояние, пройденное материальной точкой по траектории, представляет собой путьs. Вектор Мгновенная скорость материальной точки в момент времени tесть первая производная по времени от радиус-вектора движущейся материальной точки:
Вектор скорости в каждой точке траектории направлен по касательной к траектории в этой точке. Проекции вектора скорости на координатные оси х, у и z равны
а вектор и модуль скорости определяются выражениями:
Характеристикой изменения скорости является ускорение
В каждой точке траектории вектор ускорения можно разложить на две составляющие: одна из них направлена по касательной к траектории в данной точке и называется тангенциальным ускорением
Модуль полного ускорения равен
Путь, пройденный за промежуток времени от момента t1 до t2,:
 , где υ – модуль скорости.
, где υ – модуль скорости. Кинематика вращательного движения.
Если точка вращается вокруг неподвижной оси , то она описывает окружность с центром на оси вращения, а плоскость этой окружности перпендикулярна оси вращения. Быстроту и направление вращения характеризуют угловой скоростью
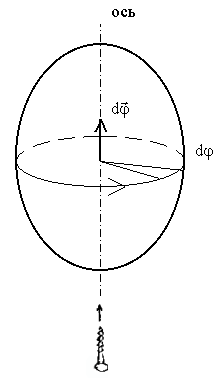
 правого винта. Тогда векторы угловой
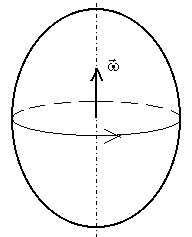
правого винта. Тогда векторы угловой Для характеристики неравномерного движения по окружности используется векторная величина, называемая угловым ускорением
Если движение материальной точки ускоренное, то векторы угловой скорости и углового ускорения совпадают по направлению; если движение замедленное, то эти векторы направлены в противоположные стороны. Такие векторы, направление которых совпадает с направлением некоторой оси, называются аксиальными. У них нет определенной точки приложения, они могут изображаться в любом месте на оси вращения.
При равнопеременном вращении для величин угловой скорости и углового ускорения выполняются соотношения (аналогичные соотношениям для линейной скорости и линейного ускорения):
1.2. ОСНОВЫ ДИНАМИКИ.
Законы динамики.
В основе динамики лежат три закона Ньютона. Первый закон Ньютона (закон инерции) касается движения тел, не испытывающих внешних воздействий: всякое тело сохраняет состояние покоя или равномерного прямолинейного движения до тех пор, пока воздействие со стороны других тел не заставит его изменить это состояние. Системы отсчета, жестко связанные с такими (свободными) телами, называются инерциальными системами отсчета (ИСО).
Для количественного описания воздействия тел друг на друга вводится понятие силы. Сила — векторная величина
Сила