Файл: Техническое задание в данной работе спроектирован привод цепного конвейерапо следующим исходным данным Окружное усилие на звёздочках F.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 10.01.2024
Просмотров: 53
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
[σ0F] = [σ0F]’KFL (3.8)
Принята 7-я степень точности. Коэффициенты: концентрации нагрузки KНβ
= 1; динамической нагрузки K= 1,2.
Межосевое расстояниеиз расчёта по контактным напряжениям aw, мм:
aw = 61((Т2KН) / [σН]2)(1/3) (3.9)
Делительный диаметр червяка d1, мм:
d1 = mq, (3.10)
где q – коэффициент диаметра червяка.
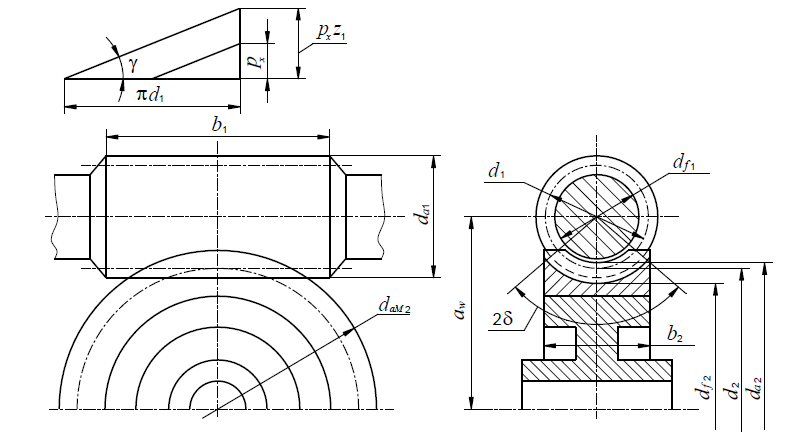
Рисунок 3.2 – Червячное зацепление
q = z2 / 4 (3.11)
m = 2a / (z2 + q) (3.12)
где а – делительное межосевое расстояние.
а = 0,5m(z2 + q). (3.13)
Коэффициент смещения инструмента х2:
х2 = (аw – а) / m. (3.14)
Начальный диаметр червяка dw1, мм:
dw1 = (q + 2x2)m. (3.15)
Диаметр вершин колеса da2, мм:
da2 = m(z2 + 2 + 2x2). (3.16)
Диаметр впадин колеса df2, мм:
df2 = m(z2 - 2,4 + 2x2) (3.17)
Начальный угол подъёма винтовой линии yw:
γw = arctg(z1 / (q+ 2x2)) (3.18)
Делительный угол подъёма винтовой линии y:
γ = arctg(z1 / q). (3.19)
Делительный диаметр колеса d2, мм:
d2 = mz2. (3.20)
Максимальный диаметр колеса dам2, мм:
dам2 = da2 + 6m / (z1 + 2). (3.21)
Диаметр вершин червяка da1, мм:
da1 = m(q + 2). (3.22)
Диаметр впадин червяка df1, мм:
df1 = m(q – 2,4). (3.23)
Длина нарезной части червяка b1, мм:
b1 = (11 + 0,06z2)m. (3.24)
Ширина венца колесаb2, мм:
b2 = 0,75da1 (3.25)
Угол обхвата червяка:
2δ = 2b2 / (da1 – 0,5m). (3.26)
Рабочее контактное напряжение σН, МПа:
σН = (475 / d2)(T2KH / dw1)(1/2) ≤ [σН]. (3.27)
Окружное усилие на червяке, равное осевому усилию на колесеFt1 = Fa2, H:
Ft1 = Fa2 = 2T1 / d1. (3.28)
Окружное усилие на колесе, равное осевому усилию на червякеFt2 = Fa1, H:
Ft2 = Fa1 = 2T2 / d2. (3.29)
Радиальное усилие Fr, H:
Fr = Ft2tgα / cosγw (3.30)
Эквивалентное число зубьев колесаzv2:
zv2 = z2 / cos3γw. (3.31)
Рабочее изгибное напряжение σ0F, МПа:
σ0F = 0,6Ft2KFYF/ (b2m) ≤ [σ0F]. (3.32)
Механический КПД червячной передачиη:
η = 0,95tgγw / tg(γw + ρ’). (3.33)
где ρ’ – приведённый угол трения.
В данном случае, что бы не было перегрева редуктора, требуется внешнее охлаждение…..
В данном курсовом проекте расчёт червяка выполнен с помощью компьютерной программы APMWINMACHINEв модуле TRANS.
Результаты расчётов приведены в приложении А.
4ОРИЕНТИРОВОЧНЫЙ РАСЧЕТ ВАЛОВ
Ориентировочным способом следует рассчитывать все валы привода. Из расчёта по касательным напряжениям определяется диаметр вала d, мм:
 , (4.1)
, (4.1)гдеТ— крутящий момент на соответствующем валу (ТI, TII и т.д.), Нмм, он равен вращающему моменту;
 — допускаемое касательное напряжение; для червяка рекомендуется = 10...12 МПа, для опасного сечения следует принимать, для хвостовика вала = 25 МПа.
— допускаемое касательное напряжение; для червяка рекомендуется = 10...12 МПа, для опасного сечения следует принимать, для хвостовика вала = 25 МПа.Исходные данные: TI=483,6Н·м,TII=5051,31Н·м,.
Рассчитан быстроходный вал редуктора. Ступенчатая конструкция быстроходного вала представлена на рисунке 4.1.
Рисунок 4.1–Эскиз быстроходного вала редуктора
Ступенчатый вал должен имеет три ступени: подступичную частьd1(головку), опорные участки d2и выступающую часть d3(хвостовик). Для обеспечения осевой фиксации деталей, собираемых на валу, а также возможности съёма подшипника разность диаметров соседних участков вала должна быть d = 5...12 мм в интервале диаметров d= 20...80 мм.
Диаметр хвостовика вала I по формуле (56):
 .
.Диаметр шейки вала I принят 55мм
Диаметр червяка
Диаметр гладкого вала II:
 мм.
мм.Выходной вал редуктора проектируем гладким (рисунок 4.2).
Рисунок 4.2 – Эскиз тихоходного вала редуктора
Диаметр гладкого вала: Принят 110мм
5 ЭСКИЗНАЯ КОМПОНОВКА РЕДУКТОРа
Эскизная компоновка редуктора выполняется по результатам выполненных расчетов и полученными геометрическими параметрами деталей передач, а так же с некоторым предвидением конструктивных решений. Эскизы следует выполнять в двух проекциях.
Компоновочный чертеж размещается в одной проекции – разрез по осям валов. Предпочтителен масштаб 1:1.
Исходными данными компоновки являются: максимальный крутящий момент редуктора, межосевые расстояния, диаметры колес, ширина колес, диаметры валов, рассчитанные ориентировочным способом, и другие параметры, необходимые для выполнения эскиза.
Особенностью конструкции является использование радиально-упорных подшипников и назначение расстояния между опорами червяка без учета длины червяка.
Эскизную компоновку выполняют в следующем порядке:
-
Вычерчивают оси быстроходного и тихоходного валов, располагая их на межосевом расстоянии aw, aw=200мм. -
Вычерчивают контуры червячного колеса, тихоходного вала, радиально-упорных подшипников средней серии, поставленных «враспор», и зазоры. Толщину стенки корпуса из чугунного литья, отвечающего требованиям технологии литейного производства и необходимых прочности и жесткости, определяют по эмпирической зависимости:
 , (6.1)
, (6.1)где Ттх – крутящий момент на тихоходном валу редуктора, Ттх=2524,35 Н·м.

Принимаем δ=12мм.
Толщина стенки крышки корпуса

 (6.2)
(6.2)
Намечают внутренние стенки редуктора, назначая расстояние от них до торцов колес либо их ступиц Δ2=0.8δ и минимальное расстояние до венцов колес Δ3≥1,25δ.
Δ2=0.8·12 = 9,6мм=10мм;
Δ3=1,25·12 = 15 мм.
Принимаем Δ3= 15мм.
Расстояние между линиями действия реакций опор L2 определяется измерением элементов.
-
Вычерчивают контуры червяка, быстроходного вала, выполняемого обычно заодно с червяком, и проектируют подшипниковые узлы. На червяк действуют значительные осевые нагрузки, поэтому один из вариантов опор – радиально-упорные подшипники, поставленные «враспор» -
Задают расстояние между серединами опор червяка по соотношению:
 (6.3)
(6.3)
-
Назначают роликовые конические однорядные подшипники средней серии, одинаковые для обеих опор, и выписывают размеры d×D×B×r, таблица 6.1; расстояние от внутренней стенки редуктора до торца подшипника следует принимать Δ4=(2…12)мм. Принимаем Δ4= 10мм.
Таблица 6.1 - Подшипники
| № вала | Подшипник | Размеры, мм | |||
| d | D | B | r | ||
| I | 67511А ГОСТ 27365-87 | 55 | 100 | 25 | 2,0 |
| II | 67222А ГОСТ 27365-87 | 110 | 200 | 38 | 3,0 |
-
Конструируют подшипниковый узел для определения размеров консоли. Ориентировочно длину консоли (расстояние от середины подшипника до середины ступицы) назначают
-для быстроходного вала:
lк.б.=(2.2…2.5)d, (6.4)
где d - внутренний диаметр подшипника. В процессе второй эскизной компоновки длину консоли уточняют.
lк.б.=(2,2…2,5)· 55=(121…137,5)мм;
принято lк.б.= 130мм.
-для тихоходного:
lк.т=(1.9…2.2)∙d3 (6.5)
lк.т=(1.9…2.2)∙110 = (209…242)
принято lк.т= 220 мм
Эскизная компоновка приведена в приложении Г.
6 ПРИБЛИЖЕННЫЙ РАСЧЕТ ВАЛОВ
Согласн заданию для расчетов выбран тихохдный вал редуктора.
Цель приближенного расчета является получение более достоверных результатов, чем в ориентировочном расчёте, так как диаметр вала определяют из расчёта на сложное напряженное состояние при действии крутящего и изгибающего моментов.В данном разделе исходными данными расчёта являются: силы, действующие на червяк, шкив, расстояния между линиями действия всех сил, диаметры колёс.
Этапы приближённого расчёта валов.
А. Выполнение эскизной компоновки редуктора.
Б. Составление расчётных схем сил, действующих на вал в двух взаимноперпендикулярных плоскостях.
В. Определение реакций опор R в двух плоскостях, радиальных Fr и осевых Fa нагрузок на подшипники.
Г. Построение эпюр изгибающих моментов
M в двух плоскостях и эпюры крутящих моментов T.
Д. Определение приведенного момента в расчётном (опасном) сечении:
 (6.1)
(6.1)где – коэффициент, учитывающий соответствие циклов касательного (от крутящего момента Т) и нормального (от изгибающего момента М) напряжений; при реверсивной работе привода = 1, для нереверсивного привода в предположении частого включения и выключения электродвигателя = 0,7.
Е. Определение диаметра вала в опасном сечении.
 , (6.2)
, (6.2)где
 –допускаемое нормальное напряжение, для наиболее распространенных марок сталей = 50...60 МПа; верхнее значение принимают для вала-шестерни из высокопрочного материала.
–допускаемое нормальное напряжение, для наиболее распространенных марок сталей = 50...60 МПа; верхнее значение принимают для вала-шестерни из высокопрочного материала.6.1 Расчет тиходного вала
Исходные данные: крутящий момент ТI=5051Н·м
Решение:
1)Составлена расчётная схема вала (рисунок 8). На схеме нагружения валов (рисунок 8,а)действующие силы приложены в соответствии с кинематической схемой на рисунке 1.
2)Определены реакции и моменты в плоскостиZOY. Силы, действующие в направлении Z, показаны на рисунке 8, б. Реакции опор RА1и RВ1 определены из двух уравнений равновесия. Третье уравнение использовано для проверки.
Осеваясила на тиходном Fa приведена к моменту:
m1 = Fa∙d/2 = 9746.901 ∙ 0,3024 /2 = 1474Н (6.3)
Уравнение моментов сил относительно опоры 1:
 , (6.4)
, (6.4)откуда

Уравнение моментов сил относительно опоры 2:
 , (6.5)
, (6.5)откуда

Проверочный расчёт выполнен по уравнению проекций:
Σz = 0; RA1 + RB1 – Fr1 – Fr2 = 11777+ 455–12327= 0 (6.6)
Полученное значение равно нулю. Эпюры изгибающих моментов
(рисунок 8, в) построены на растянутых волокнах. Значения моментов Mz:
Участок №1 0 ≤ х1 ≤ 0.258
Mz = RA1∙x1 (6.7)
Mz(0) = 0 H∙м; Mz(0,385) =455 ∙ 0,159 =72H∙м
Участок №2 0 ≤ х2 ≤ 0,159
Mz = Rb2∙x2 (6.8)
Mz