Файл: Учебнометодический комплекс по дисциплине электрооборудование фармацевтического производства для специальности 5В074800 Технология фармацевтического производства.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 11.01.2024
Просмотров: 219
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
, а затем выдаются им на приемник данных. В режиме прямого доступа к памяти МП отключается от шин системы и передает управление или контроллеру прямого доступа, а передачи данных осуществляются в один этап – непосредственно от источника к приемнику.
В состав МПС часто входят также программируемые таймеры, формирующие различные сигналы (интервалы, последовательности импульсов и т.д.) для проведения операций, связанных со временем.
С учетом сказанного выше обобщенная структура микропроцессорных систем может быть представленная в виде, приведенном на рис. 41.
Устройство управления (УУ), входящее в состав МП, представляет собой последовательностное устройство, реализованное на логических элементах (аппаратная реализация) или на базе ПЗУ (микропрограммная реализация). В качестве операционного устройства (ОУ) в МП обычно используется АЛУ со сдвигателем. В состав МП часто включается регистровое ЗУ (РЗУ) для хранения промежуточных результатов.
Через ИУ к системе подключаются внешние устройства. При обмене информацией то или иное ИУ (внешнее устройство) адресуется МП по шине DB (AD). При этом также формируются сигналы управления на шине СВ, определяющие режим обмена.
В МПС часто включается программируемый таймер (ПТМ), который через определенные промежутки времени вырабатывает управляющие сигналы, включающие или выключающие системы или отдельные устройства, либо изменяющие режимы их работы. Дополнительные устройства – контроллеры прерываний и прямого доступа к памяти – обеспечивают соответствующие режимы работы МПС.
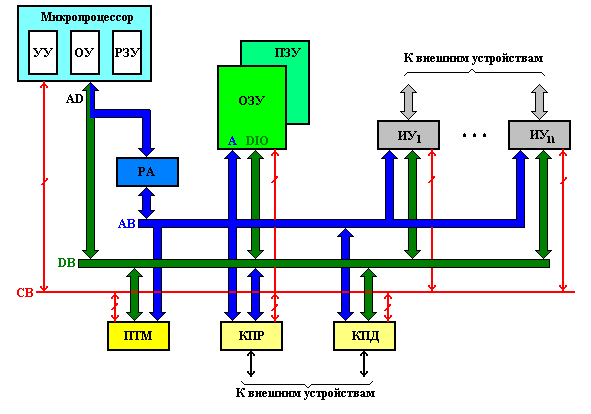
Рисунок 41
Основная литература: [2, 5, 6];
Дополнительная литература: [7, 8].
Трансформатор Устройство. Опыт холостого хода и короткого замыкания. Рабочий режим. Векторная диаграмма.
Трансформаторы. Назначение и область применения. Векторная диаграмма и схемы замещения трансформатора. Трехфазные трансформаторы. Группы соединений обмоток трансформаторов. Параллельная работа трансформаторов.
Однофазные и трехфазные автотрансформаторы. Измерительные трансформаторы тока и напряжения.
Виды электромагнитных устройств. Назначение магнитопровода. Свойства ферромагнитных материалов. Магнитные цепи с постоянной магнитодвижущей силой (МДС). Реальная и идеализированная магнитные цепи. Закон полного тока и его применение для анализа магнитной цепи.
Вебер-амперные характеристики. Неразветвленные и разветвленные магнитные цепи. Графоаналитические методы расчета магнитных цепей.
Магнитные цепи с переменной МДС. Реальная и идеализированная катушки с магнитопроводом. Уравнения электрического состояния, векторная диаграмма и схема замещения реальной катушки с магнитопроводом.
Классификация электрических машин. Двигатели и генераторы. Обратимость электрических машин. Структура электропривода (синхронный и асинхронный электропривод).
Электрические машины постоянного тока
Устройство и принцип действия машины постоянного тока (МПТ). Электродвижущая сила и электромагнитный момент МПТ. Реакция якоря.
Генераторы с независимым возбуждением и самовозбуждением. Генераторы с последовательным, параллельным и смешанным возбуждением.
Режим двигателя. Двигатели с последовательным, параллельным и смешанным возбуждением. Регулирование скорости вращения якоря двигателя. Пуск двигателя постоянного тока. Пусковой момент на валу якоря двигателя, универсальные коллекторные машины.
Асинхронные и синхронные машины
Устройство трехфазной асинхронной машины. Вращающееся магнитное поле. Режимы работы трехфазной асинхронной машины. Скольжение. Электродвижущие силы, индуктируемые в обмотках статора и ротора. Токи в обмотке ротора.
Электромагнитный момент. Частота вращения ротора. Векторная диаграмма фазы асинхронного двигателя (АД). Схема замещения. Энергетический баланс АД. Вращающий момент АД. Механическая характеристика АД.
Пуск АД. Асинхронные двигатели с фазным и короткозамкнутым роторами. Рабочие характеристики АД. Способы регулирования скорости вращения ротора. Устройство трехфазных синхронных машин. Режимы работы синхронной машины.
Получение синусоидальной ЭДС в синхронном генераторе. Уравнение электрического состояния, схема замещения и упрощенная векторная диаграмма фазы синхронного генератора (СГ).
Электромагнитный момент и угловая характеристика СГ, V-образная характеристика СГ. Регулирование активной и реактивной мощности СГ. Включение СГ на параллельную работу с системой бесконечной мощности.
Уравнение электрического состояния, схема замещения и упрощенная векторная диаграмма фазы синхронного двигателя (СД).
Электромагнитный момент и угловая характеристика СД. V-образная характеристика СД. Регулирование активной и реактивной мощности СД. Пуск СД.
Основная литература: [1, 3];
Дополнительная литература: [9, 11].
Электропривод – электромеханическая система, состоящая из электродвигательного, преобразовательного, передаточного и управляющего устройств, предназначенная для приведения в движение исполнительных органов рабочей машины и управления этим движением.
Теория электропривода охватывает многие вопросы, знание которых позволяет рассчитать и выбрать элементы электропривода, а также разработать схему автоматического управления как двигателем, так и всем производственным процессом в соответствии с технологическими требованиями.
К этим вопросам относятся:
- механические характеристики электроприводов в двигательном и тормозном режимах;
- регулирование частоты вращения электроприводов;
- переходные процессы в электроприводах;
- расчет пусковых, тормозных и регулировочных резисторов;
- определение мощности электродвигателя и выбор его по каталогу;
- разработка схемы управления двигателем и всем производственным процессом;
- выбор электрической аппаратуры управления.
Переходным процессом называется процесс перехода электропривода от одного установившегося состояния к другому, когда одновременно изменяются скорость, момент и ток двигателя, а также скорость и моменты всех звеньев кинематической цепи, соединяющей двигатель с рабочим органом механизма.
К переходным процессам относятся пуск, торможение и реверс электропривода, переход с одной скорости на другую, а также процессы, вызванные изменениями момента на валу двигателя, изменением напряжения сети.
Потери в двигателе при пуске и торможении могут оказаться соизмеримыми с потерями в установившихся режимах. Поэтому при определении мощности двигателя необходимо учитывать потери при пуске и торможении, особенно когда число пусков и торможений в час относительно велико.
Характер и длительность переходного процесса определяются моментом двигателя, моментами сил сопротивления, массами и моментами инерции движущихся тел.
Определение мощности двигателя
для производственного механизма выполняется в соответствии с нагрузкой на его валу по условиям нагрева. После того как двигатель выбран по условиям нагрева по каталогу, его проверяют по перегрузочной способности и условиям пуска. Необходимо выбрать такой двигатель по номинальной мощности, при которой он бы нагревался за время работы до температуры, не превосходящей допустимую. Превышение допустимой температуры приводит к потере изоляцией электрической и механической прочности и к выходу двигателя из строя.
Завышение мощности двигателя связано с дополнительными капитальными затратами, увеличением расхода энергии, а для асинхронных двигателей – с ухудшением коэффициента мощности.
Защита силовых цепей и двигателя от коротких замыканий осуществляется плавкими предохранителями, защита двигателя от перегрева, вызванного перегрузками – тепловым реле. Включение и отключение двигателя производится электромагнитным аппаратом – контактором. В некоторых случаях вместо контактора используются автоматы или бесконтактные схемы включения на тиристорах.
Основная литература: [1, 3];
Дополнительная литература: [9, 11].
7. Планы семинарских занятий
Не предусмотрено типовой программой.
8. Планы лабораторных занятий
Тема Изучение закона Ома для участка цепи
Лабораторная работа 1
Цель работы: Экспериментальное изучение закона Ома для участка электрической цепи содержащего сопротивление.
Вопросник
1. Назначение и принцип действия установки.
2. Какова физическая сущность сопротивления проводника?
3. В чем заключается физический смысл закона Ома для участка цепи?
4. Чем отличается закон Ома для участка цепи и полной цепи?
5. Как посчитать тепловую энергию, выделенную током в проводнике?
6. Почему с уменьшением приложенного напряжения уменьшается ток, протекающий через сопротивление R?
7. Почему при измененном напряжении при уменьшении сопротивления ток возрастает?
8. Как определить направление тока в цепи?
Задание:
В состав МПС часто входят также программируемые таймеры, формирующие различные сигналы (интервалы, последовательности импульсов и т.д.) для проведения операций, связанных со временем.
С учетом сказанного выше обобщенная структура микропроцессорных систем может быть представленная в виде, приведенном на рис. 41.
Устройство управления (УУ), входящее в состав МП, представляет собой последовательностное устройство, реализованное на логических элементах (аппаратная реализация) или на базе ПЗУ (микропрограммная реализация). В качестве операционного устройства (ОУ) в МП обычно используется АЛУ со сдвигателем. В состав МП часто включается регистровое ЗУ (РЗУ) для хранения промежуточных результатов.
Через ИУ к системе подключаются внешние устройства. При обмене информацией то или иное ИУ (внешнее устройство) адресуется МП по шине DB (AD). При этом также формируются сигналы управления на шине СВ, определяющие режим обмена.
В МПС часто включается программируемый таймер (ПТМ), который через определенные промежутки времени вырабатывает управляющие сигналы, включающие или выключающие системы или отдельные устройства, либо изменяющие режимы их работы. Дополнительные устройства – контроллеры прерываний и прямого доступа к памяти – обеспечивают соответствующие режимы работы МПС.
Рисунок 41
Основная литература: [2, 5, 6];
Дополнительная литература: [7, 8].
Тема 9 Электрические машины
Трансформатор Устройство. Опыт холостого хода и короткого замыкания. Рабочий режим. Векторная диаграмма.
Трансформаторы. Назначение и область применения. Векторная диаграмма и схемы замещения трансформатора. Трехфазные трансформаторы. Группы соединений обмоток трансформаторов. Параллельная работа трансформаторов.
Однофазные и трехфазные автотрансформаторы. Измерительные трансформаторы тока и напряжения.
Виды электромагнитных устройств. Назначение магнитопровода. Свойства ферромагнитных материалов. Магнитные цепи с постоянной магнитодвижущей силой (МДС). Реальная и идеализированная магнитные цепи. Закон полного тока и его применение для анализа магнитной цепи.
Вебер-амперные характеристики. Неразветвленные и разветвленные магнитные цепи. Графоаналитические методы расчета магнитных цепей.
Магнитные цепи с переменной МДС. Реальная и идеализированная катушки с магнитопроводом. Уравнения электрического состояния, векторная диаграмма и схема замещения реальной катушки с магнитопроводом.
Электрические машины
Классификация электрических машин. Двигатели и генераторы. Обратимость электрических машин. Структура электропривода (синхронный и асинхронный электропривод).
Электрические машины постоянного тока
Устройство и принцип действия машины постоянного тока (МПТ). Электродвижущая сила и электромагнитный момент МПТ. Реакция якоря.
Генераторы с независимым возбуждением и самовозбуждением. Генераторы с последовательным, параллельным и смешанным возбуждением.
Режим двигателя. Двигатели с последовательным, параллельным и смешанным возбуждением. Регулирование скорости вращения якоря двигателя. Пуск двигателя постоянного тока. Пусковой момент на валу якоря двигателя, универсальные коллекторные машины.
Асинхронные и синхронные машины
Устройство трехфазной асинхронной машины. Вращающееся магнитное поле. Режимы работы трехфазной асинхронной машины. Скольжение. Электродвижущие силы, индуктируемые в обмотках статора и ротора. Токи в обмотке ротора.
Электромагнитный момент. Частота вращения ротора. Векторная диаграмма фазы асинхронного двигателя (АД). Схема замещения. Энергетический баланс АД. Вращающий момент АД. Механическая характеристика АД.
Пуск АД. Асинхронные двигатели с фазным и короткозамкнутым роторами. Рабочие характеристики АД. Способы регулирования скорости вращения ротора. Устройство трехфазных синхронных машин. Режимы работы синхронной машины.
Получение синусоидальной ЭДС в синхронном генераторе. Уравнение электрического состояния, схема замещения и упрощенная векторная диаграмма фазы синхронного генератора (СГ).
Электромагнитный момент и угловая характеристика СГ, V-образная характеристика СГ. Регулирование активной и реактивной мощности СГ. Включение СГ на параллельную работу с системой бесконечной мощности.
Уравнение электрического состояния, схема замещения и упрощенная векторная диаграмма фазы синхронного двигателя (СД).
Электромагнитный момент и угловая характеристика СД. V-образная характеристика СД. Регулирование активной и реактивной мощности СД. Пуск СД.
Основная литература: [1, 3];
Дополнительная литература: [9, 11].
Тема 10 Электропривод
Электропривод – электромеханическая система, состоящая из электродвигательного, преобразовательного, передаточного и управляющего устройств, предназначенная для приведения в движение исполнительных органов рабочей машины и управления этим движением.
Теория электропривода охватывает многие вопросы, знание которых позволяет рассчитать и выбрать элементы электропривода, а также разработать схему автоматического управления как двигателем, так и всем производственным процессом в соответствии с технологическими требованиями.
К этим вопросам относятся:
- механические характеристики электроприводов в двигательном и тормозном режимах;
- регулирование частоты вращения электроприводов;
- переходные процессы в электроприводах;
- расчет пусковых, тормозных и регулировочных резисторов;
- определение мощности электродвигателя и выбор его по каталогу;
- разработка схемы управления двигателем и всем производственным процессом;
- выбор электрической аппаратуры управления.
Переходным процессом называется процесс перехода электропривода от одного установившегося состояния к другому, когда одновременно изменяются скорость, момент и ток двигателя, а также скорость и моменты всех звеньев кинематической цепи, соединяющей двигатель с рабочим органом механизма.
К переходным процессам относятся пуск, торможение и реверс электропривода, переход с одной скорости на другую, а также процессы, вызванные изменениями момента на валу двигателя, изменением напряжения сети.
Потери в двигателе при пуске и торможении могут оказаться соизмеримыми с потерями в установившихся режимах. Поэтому при определении мощности двигателя необходимо учитывать потери при пуске и торможении, особенно когда число пусков и торможений в час относительно велико.
Характер и длительность переходного процесса определяются моментом двигателя, моментами сил сопротивления, массами и моментами инерции движущихся тел.
Определение мощности двигателя
для производственного механизма выполняется в соответствии с нагрузкой на его валу по условиям нагрева. После того как двигатель выбран по условиям нагрева по каталогу, его проверяют по перегрузочной способности и условиям пуска. Необходимо выбрать такой двигатель по номинальной мощности, при которой он бы нагревался за время работы до температуры, не превосходящей допустимую. Превышение допустимой температуры приводит к потере изоляцией электрической и механической прочности и к выходу двигателя из строя.
Завышение мощности двигателя связано с дополнительными капитальными затратами, увеличением расхода энергии, а для асинхронных двигателей – с ухудшением коэффициента мощности.
Защита силовых цепей и двигателя от коротких замыканий осуществляется плавкими предохранителями, защита двигателя от перегрева, вызванного перегрузками – тепловым реле. Включение и отключение двигателя производится электромагнитным аппаратом – контактором. В некоторых случаях вместо контактора используются автоматы или бесконтактные схемы включения на тиристорах.
Основная литература: [1, 3];
Дополнительная литература: [9, 11].
7. Планы семинарских занятий
Не предусмотрено типовой программой.
8. Планы лабораторных занятий
Тема Изучение закона Ома для участка цепи
Лабораторная работа 1
Цель работы: Экспериментальное изучение закона Ома для участка электрической цепи содержащего сопротивление.
Вопросник
1. Назначение и принцип действия установки.
2. Какова физическая сущность сопротивления проводника?
3. В чем заключается физический смысл закона Ома для участка цепи?
4. Чем отличается закон Ома для участка цепи и полной цепи?
5. Как посчитать тепловую энергию, выделенную током в проводнике?
6. Почему с уменьшением приложенного напряжения уменьшается ток, протекающий через сопротивление R?
7. Почему при измененном напряжении при уменьшении сопротивления ток возрастает?
8. Как определить направление тока в цепи?
Задание:
-
В соответствии с данными, приведенными в заданиях к лабораторной работе произвести проверку закона Ома для участка цепи. -
Сравнить полученные экспериментальные данные с теоретическими. -
Вычислить погрешность измерения. -
По результатам измерений построить график зависимости величины тока от напряжения.