Файл: ОТУ 2016-11-17 Лекция 10. Анализ статических режимов.pdf
ВУЗ: Нижегородский государственный технический университет
Категория: Лекция
Дисциплина: Основы теории управления
Добавлен: 15.02.2019
Просмотров: 1005
Скачиваний: 4
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

Следящие системы
(системы позиционирования)
1
2
W
M
p
W
V
Y
V
M
W
W
p
W
V
W
W
p
p
2
1
2
2
1
M
W
pV
W
W
p
2
2
1
m
k
1
0
1
W
1
(p)
v
y
W
2
(p)
m
δ
1/p

Пример следящей системы
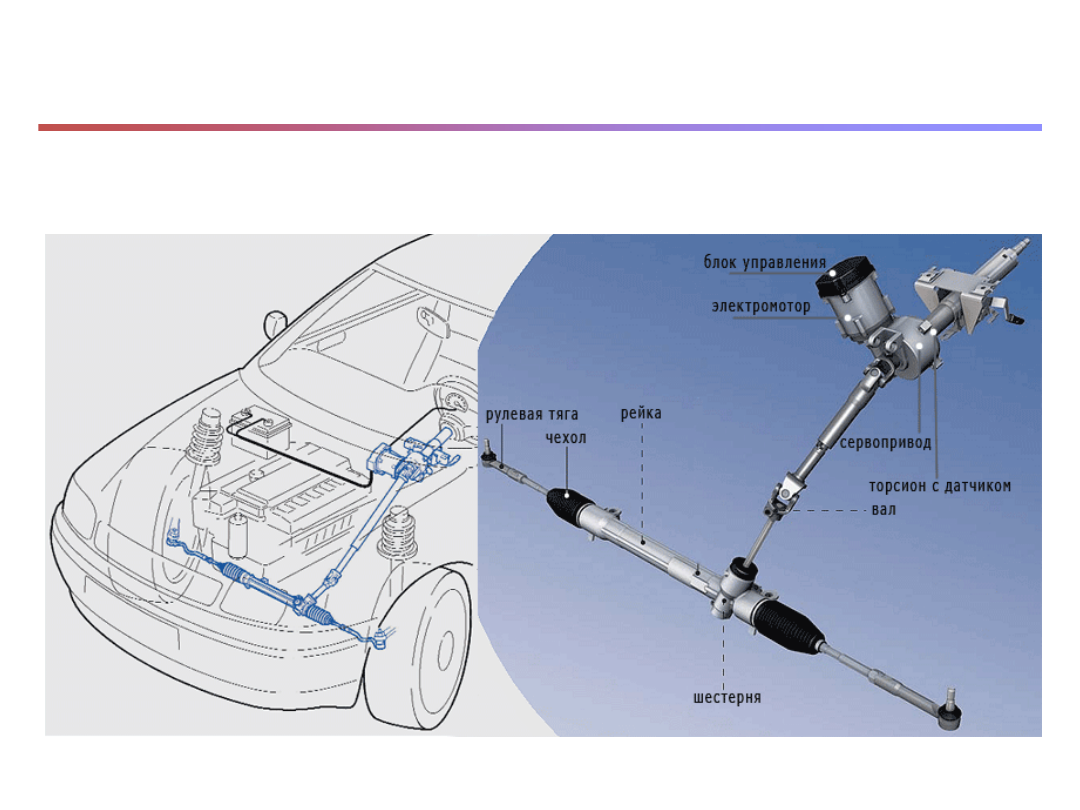
Пример следящей системы
Электрический усилитель в рулевом приводе
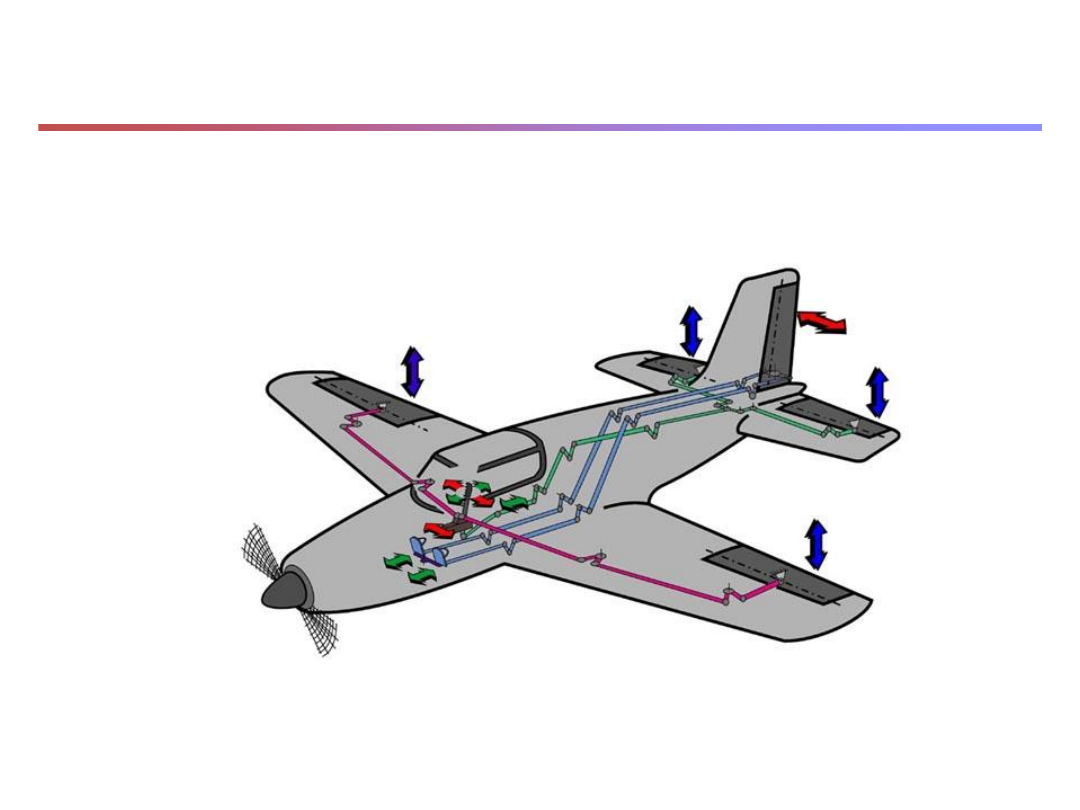
Пример следящей системы

Режим линейной заводки следящей системы
t
t
v
2
1
2
1
2
W
p
M
p W W
p
p W W
2
1
2
1
2
1
W
M
p W W
p W W
m
k
k
k
k
W
k
W
1
2
1
0
2
2
1
1
1
1
0
,
0