Добавлен: 25.10.2023
Просмотров: 221
Скачиваний: 5
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
СОДЕРЖАНИЕ
Требования к управлению рабочей машиной
Расчет и построение нагрузочной диаграммы рабочей машины
Проверка выбранного электродвигателя на нагревание за цикл нагрузочной диаграммы
Построение механической и электромеханической характеристики электродвигателя
Выбор элементов кинематической принципиальной схемы
Выбор аппаратов управления электроприводом
Определение удельных энергетических показателей разработанного электропривода
Пояснение о размещение аппаратов в ящике управления и составлению схемы соединений ящика управления
Содержание
3
Введение
Основная тенденция развития современного сельского хозяйства - его интенсификация и индустриализация на базе достижений науки, техники и передового опыта. Всё более важное значение приобретает автоматизация производственных процессов, которая становится одним из решающих факторов роста производительности труда, увеличение количества получаемой продукции, повышение её качества, снижение себестоимости, улучшение условий труда.
Современный электропривод определяет собой уровень силовой электровооружённости, является главным средством автоматизации рабочих машин и механизации производственных процессов. Электропривод потребляет более 60% вырабатываемой энергии.
Преимущества электропривода состоит в том, что электрическая энергия легко передаётся на большие расстояния, обладают высокой экологической чистотой, что немаловажно в современных технологиях, а также может преобразовываться не только в механическую, но и в тепловую и в другие виды энергии, необходимые как в производстве, так и в быту. Электропривод отличается большим количеством конструктивных решений, функционального назначения, технических параметров и т.д. Преимущества использования электропривода могут быть реализованы лишь при правильном его выборе по различным параметрам.
Таким образом, целью данной работы является разработка электропривода кормораздатчика КЛО-75 с учетом режима работы и характера изменения нагрузки.
Для достижения данной цели необходимо решить следующие задачи: провести анализ технологической характеристики рабочей машины, произвести выбор и проверку электродвигателя привода рабочей машины, разработать схему управления и спроектировать ящик управления.
-
Технологическая характеристика рабочей машины
-
Назначение
-
Кормораздатчики КЛО-75 предназначен для раздачи измельченных зеленых кормов, грубых и сочных стебельных кормов (силоса, сенажа, сена, соломы) их смесей, готовых смесей на фермах крупного рогатого скота при привязном и беспривязном способах содержания, а также для удаления остатков несъеденного корма из кормушек. Особенностью кормораздатчиков является то, что в них использована стальная лента толщиной 1 мм. Она дешевле резинотканевой и долговечнее в работе.
-
Описание конструкции рабочей машины
Кормораздатчик КЛО-75 (рис. 9) включает в себя приводную станцию 1, ленту 3, тяговый канат (трос) 5, каретку с блоком 4, сбрасывающий плужок 2 для очистки кормушек.
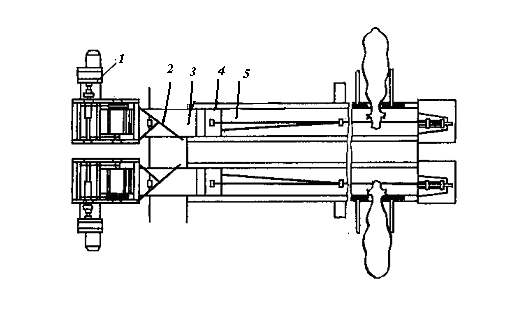
Схема 1 ленточного раздатчика кормов КЛО-75
1 – привод; 2 – плужковый сбрасыватель; 3 – лента; 4 – каретка; 5 – трос.
-
Описание рабочих органов и параметров
Приводная станция кормораздатчика включает мотор-редуктор 2, верхний барабан 11 для ленты, нижний барабан 1 для тягового каната, механизм переключения 14, распределительный вал (контрпривод), тормозное устройство 5, раму и концевые выключатели 17 с винтовым механизмом 15, 16. Рабочий орган служит для перемещения корма по кормовому желобу, состоит из стальной ленты 6 и тягового каната 8, которые соединены между собой специальным устройством. Каретка с блоком 7 установлена в противоположном от приводной станции конце кормушки. Через блок каретки перекинут тяговый канат, обеспечивающий разматывание ленты при рабочем ходе.
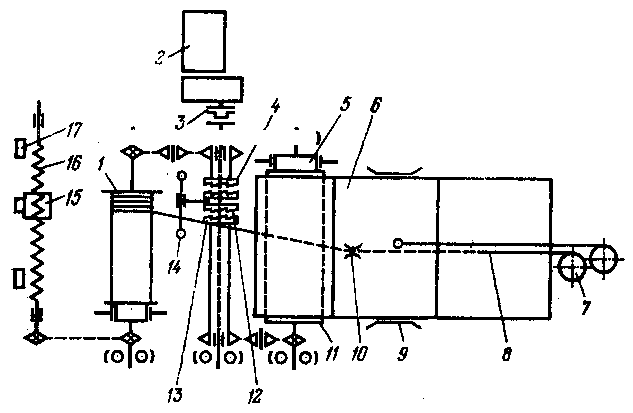
Рисунок 1 – Кинематическая схема кормораздатчика КЛО-75:
1,11 – нижний и верхний барабаны; 2 – мотор-редуктор; 3,13 – муфты; 4, 12 – кулачковые полумуфты; 5 – тормозное устройство; 6 лента; 7 – каретка с блоком; 8 – тяговый канат; 9,10 – направители; 14 – механизм переключения; 15 – Гайка; 16 – Винт; 17 - концевой выключатель.
-
Технологическая схема использования рабочей машины
Кормораздатчик ленточный односторонний КЛО-75 стационарный для раздачи измельченных зеленых листа-стебельных злаковых или бобовых трав, кукурузы, соломы, а также силоса, сенажа, резанных корнеплодов и кормосмесей с загрузкой и дозированием в тамбуре мобильным кормораздатчиком или централизованной линией кормораздачи в животноводческих помещениях молочных и откормочных ферм. Выполнен в виде лебёдки с
барабаном для стальной ленты, транспортирующей корм, и с барабаном, имеющим канат и перемещающим стальную ленту по дну кормушки. Через распределительный вал оба барабана приводятся во вращение одним приводом.
Переключение направления вращения электродвигателя производится после переключения кулачной муфты, при этом ведущий барабан становится ведомым, а ведомый – ведущим. Барабаны притормаживаются ленточными тормозами, чтобы избежать ослабление намотки каната или ленты на барабан. Для удаления остатков корма и очистки ленты установлен сбрасывающий плужок.
- 1 2 3 4 5 6 7 8 9 10 11
Требования к управлению рабочей машиной
К управлению рабочей машины должны быть предъявлены следующие требования: световая сигнализация о наличии напряжения, а также состояния рабочей машины; дистанционное ручное управление; защита цепей от токов короткого замыкания; защита электродвигателя в аварийных состояниях по критерию эффективности.
-
Характеристика условий окружающей среды требования к электрооборудованию
Оборудование располагается в коровнике. Категория размещения – химически активная среда, повышенная влажность [1]. Исходя из этого степень защиты электрооборудования IP54 [1], климатическое исполнение - У3.
-
Выбор электродвигателя для привода рабочей машины
-
расчёт и построение механических характеристик рабочие машины под нагрузкой и на холостом ходу
-
Номинальная угловая скорость
 рабочей машины и номинальный момент
рабочей машины и номинальный момент  определяется по формулам:
определяется по формулам:
 , (2.1)
, (2.1) . (2.2)
. (2.2)Величины
и определяем по (2.1) и (2.2) исходя из мощности  и частоты вращения выходного вала
и частоты вращения выходного вала :
: ,
, .
Механическая характеристика рабочей машины
 под нагрузкой строится на основании уравнения
под нагрузкой строится на основании уравнения , (2.3)
, (2.3)где
 – момент сопротивления механизма, не зависящей от скорости,
– момент сопротивления механизма, не зависящей от скорости,  ;
;
– момент сопротивления механизма при скорости
 ,
, ; – текущая (задаваемая) угловая скорость, рад/с;
; – текущая (задаваемая) угловая скорость, рад/с;α – показатель степени, характеризующие изменения момента сопротивления от скорости.
Для нашего случая номинальное значение рабочие машины в относительных единицах определяем по таблице 1.1 [1], они следующее:
- под нагрузкой:

- на холостом ходу:

Для перевода в именованные единицы воспользуемся формулами:
 , (2.4)
, (2.4) , (2.5)
, (2.5) ,
,  .
. Задаваясь значением
согласно рисунку 2.1 [1] строим механическую характеристику рабочие машины под нагрузкой. При этом уточняем механическую характеристику в области от 0 до 0,1  принимая во внимание момент трогания
принимая во внимание момент трогания  . Результаты расчетов сведем в таблицу 2.1.
. Результаты расчетов сведем в таблицу 2.1.Таблица 2.1- Расчёт механической характеристики машины под нагрузкой
 | 0 | 0,7 | 1,4 | 2,1 | 2,8 | 3,5 | 4,2 | 4,9 | 5,6 | 6,3 | 7 |
 | 687 | 528,45 | 528,45 | 528,45 | 528,45 | 528,45 | 528,45 | 528,45 | 528,45 | 528,45 | 528,45 |
При пуске рабочей машины вхолостую её механическая характеристика существенно отличается от механической характеристики под нагрузкой. В этот момент нормальной скорости