Файл: Казанский национальный исследовательский технический университет им. А. Н. Туполевакаи (книтукаи).docx
Добавлен: 07.11.2023
Просмотров: 85
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
МИНИСТЕРСТВО НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯ
РОССИЙСКОЙ ФЕДЕРАЦИИ
федеральное государственное бюджетное образовательное
учреждение высшего образования
«Казанский национальный исследовательский
технический университет им. А.Н. Туполева-КАИ»
(КНИТУ-КАИ)
Институт авиации, наземного транспорта и энергетики
(наименование института (факультета), филиала)
Кафедра машиноведения и инженерной графики
(наименование кафедры)
15.03.05 «Конструкторско-технологическое обеспечение машиностроительных производств»
Курсовая работа
по дисциплине: «Теория механизмов машин»
на тему: «Исследование шестизвенного механизма на кинематический и силовой анализ»
Обучающийся 1223 ____________ Васинкин В.С.
(номер группы) (подпись, дата) (Ф.И.О.)
Руководитель к.т.н., доцент каф.МиИГ Зайцева Т.А
(должность) (Ф.И.О.)
Курсовая работа (проект) зачтена (зачтен) с оценкой ________________
___________________
(подпись, дата)
Казань 2023
THE MINISTRY OF SCIENCE AND HIGHER EDUCATION
OF THE RUSSIAN FEDERATION
Federal State Budgetary Educational Institution of Higher Education
«Kazan National Research Technical University named after А.N. Тupolev-КАI”
(KNRTU-KAI)
Institute of Aviation, Land Transport and Energy
Chair of Engineering and Engineering Graphics
15.03.05 Design and technological
provision of machine-building industries
COURSE WORK (DRAFT)
in academic discipline
“Theory of machinery mechanisms”
On the topic:
“Investigation of the six-link mechanism for kinematic and force analysis”
Student 1223 ________ Vasinkin V.S.
(group ) (signature, date) (full name)
Lector _______________________ Zaitseva T.A.
(the post) (full name)
Course work (draft) is credited with an assessment ____________
___________________
(signature, date)
Kazan 2023
Аннотация к курсовой работе.
Данная работа направлена на закрепление и углубление знаний, полученных при изучении высшей математики, физики, теоретической механики, инженерной графики и, конечно же, теории механизмов и машин.
Актульность данной работы заключается в том, что при повышении требований и изменении условий работы возникает потребность в новой машине.
Цель курсовой работы заключается в проведении синтеза и анализа шарнирно-рычажного механизма.
Для осуществления обозначенной цели служат следующие задачи:
-
Синтез механизма по известным параметрам -
Кинематический анализ механизма -
Силовой анализ механизма
В расчетно-пояснительной записке приведено: определение недостающих параметров механизма и построение механизма; кинематический анализ с построением планов скоростей и ускорений и определение величин и направлений угловых скоростей и ускорений; также силовой анализ с определением сил реакций связи и с нахождением уравновешивающего момента.
Annotation to the coursework.
Thisworkisaimedatconsolidatinganddeepeningtheknowledgegained in the study of higher mathematics, physics, theoretical mechanics, engineering graphics and, of course, the theory of mechanisms and machines.
The actuality of this work is that with increasing requirements and changing working conditions, there is a need for a new machine.
The purpose of the course work is to conduct synthesis and analysis of the articulated mechanism.
For the implementation of the designated purpose are the following tasks:
-
Synthesis of the mechanism by known parameters -
Kinematic analysis of the mechanism -
Strength analysis of the mechanism
The calculation and explanatory note provides: determination of the missing parameters of the mechanism and the construction of a mechanism; kinematic analysis with the construction of speed and acceleration plans and determination of magnitudes and directions of angular velocities and accelerations; also force analysis with the determination of the reaction forces of the connection and the finding of a counterbalancing moment.
Оглавление
1.ИСХОДНЫЕ ДАННЫЕ 5
2.СИНТЕЗ МЕХАНИЗМА 6
2.1.Графический синтез механизма. 6
3.КИНЕМАТИЧЕСКИЙ АНАЛИЗ 11
3.1.Построение плана скоростей 11
3.2.Построение плана ускорений 14
4.СИЛОВОЙ АНАЛИЗ 20
4.1.Определение уравновешивающего момента методом плана сил 20
4.2.Рычаг Жуковского 24
5.ПОСТРОЕНИЕ ПЛАНЕТАРНОГО МЕХАНИЗМА 26
5.1Исходные данные: 26
5.2 Подбор чисел зубьев колес комбинированного зубчатого механизма 27
5.3 Кинематический анализ комбинированного зубчатого механизма графо - аналитическим методом 29
6.СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ 31
32
-
ИСХОДНЫЕ ДАННЫЕ
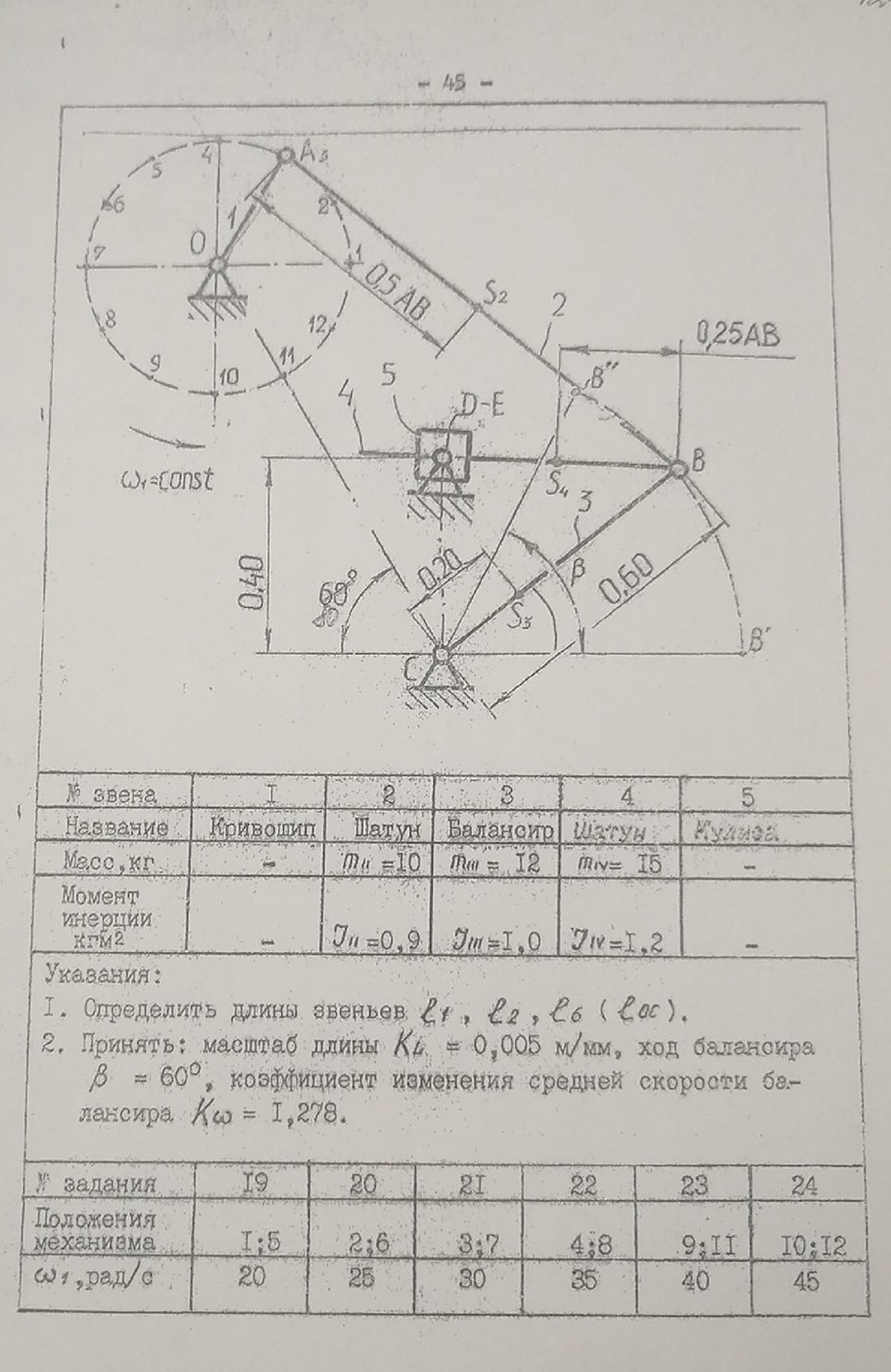
KL= 0.005 м/мм - масштабный коэффициент длины
β= 60º - ход балансира
lBC= 0.6 м – длина 3-го звена
lS2B= 0.5*lAB, lS3B= 0.3*lCB, lS4B= 0.25*lBD
-
СИНТЕЗ МЕХАНИЗМА
Механизм состоит из шести звеньев. Примем следующие условные обозначения звеньев механизма: 1 - кривошип: 2 - шатун; 3 - балансир; 4-кулиса; 5 – кулисный камень; 6 - стойка, Стойка 6 - неподвижное звено. Таким образом, количество звеньев равно 6-ти.
Звенья механизма соединены между собой кинематическими парами. Все пары низшие (вращательные и поступательные), плоские.
Обозначим кинематические пары: 1) стойка 6 образует с кривошипом 1 вращательную пару O; 2) кривошип 1 с шатуном2 – вращательную пару А; 3) шатун 2 с балансиром 3 – вращательную пару В; 4) балансир 3 со стойкой 6 – вращательную пару С; 5) шатун 2 с кулисой 4 – вращательную пару Г; 6) кулиса 4 с кулисным камнем 5 – поступательную пару Е; 7) кулисный камень 5 со стойкой 6 – вращательную пару D. Таким образом, количество низших пар (пар пятого класса) 7. Высшие пары (пары четвертого класса) отсутствуют.
Степень подвижности механизма определяем по формуле Чебышева П.Л. для плоских механизмов
W=3m-2pн-pв
где m – число подвижных звеньев;
pв – число низших кинематических пар (пятого класса);
pв – число высших кинематических пар (четвертого класса).
Для исследуемого механизма степень подвижности:
W=3*6-2*7-0=1
-
Графический синтез механизма.
Для получения действительных размеров и расчётных воспользуемся формулой:
li=|Li|/KL
где li- действительный размер звена, м;
L – Расчетный размер звена, мм;
KL - масштабный коэффициент (KL = 0,005м/мм).
Построим точку С произвольным образом. Через точку С проведем горизонтальную прямую. Из точки С под углом 150° к горизонту (по условию) откладываем луч a.
Из точки С под углом 120° к горизонту (по условию) откладываем отрезок СВ” длиной 120 мм:
lCB”=|CB”|*KL=0.6м/0.005=120мм
Из точки С под углом 60° к горизонту (по условию) откладываем отрезок СВ’ длиной 120 мм.
lCB’=|CB’|*KL=0.6м/0.005=120мм
Через точки B’ и B” строим прямую. Точку пересечения этой прямой и луча а обозначим О. Построим окружность с центром в точке О и радиусом 60 мм, равным половине длины отрезка B’B”.
Разделим окружность на 12 равных частей, как указано в задании. Выберем нужное нам положение точки А. Построим кривошип ОА.
Определим положение шатуна АВ. Для этого расположим ОА так, чтобы точка В оказалась в граничном положении В’, т.е. образовало отрезок ОВ. Замеряем длину отрезка АВ. Получаем lAB=180мм. Строим отрезок АВ из заданного положения точки А так, чтобы он пересекал дугу B’B” в точке В.
Определим положение кулисы BD. Построим вертикаль из точки С на высоту 200мм.
lCD=|CD|*KL=0.6м/0.005=120мм
Построим точку D. Построим отрезок BD. Замеряем длину отрезка BD. Получаем lBD=96.1мм. В точке D находится кулисный камень E и опора.
Получим расчётные размеры всех элементов по формуле
Li=|li|*KL
LOA=60*0.005=0.3м
LАВ=285,53*0.005=1.4м
LBD=98.45*0.005=0.49
LBS2=142.7*0.005=0.71
Построим план положений рычажного механизма в 12 положениях. Параметры механизма приведены в таблице 1.
| Действительные размеры, мм | ||||||
| OA | AB | BC | BD | BS2 | BS3 | BS4 |
| 60 | 285,53 | 120 | 98.45 | 142.7 | 40 | 71.38 |
| Расчетные размеры, м | ||||||
| OA | AB | BC | BD | BS2 | BS3 | BS4 |
| 0.3 | 1.4 | 0.6 | 0.49 | 0.71 | 0.2 | 0.35 |
1.3 Структурный анализ
Составим структурные группы механизма и определим класс и вид групп согласно классификации Л.В. Ассура.
Кулиса 4 и кулисный камень 5 образуют структурную группу II-го класса. Эта группа включает в себя три кинематические пары: Г, E, D. Поскольку пары Г и D вращательные, а соединяет их поступательная пара E то, это группа 3-ого вида. Схема данной структурной группы изображена на рисунке 1.2.
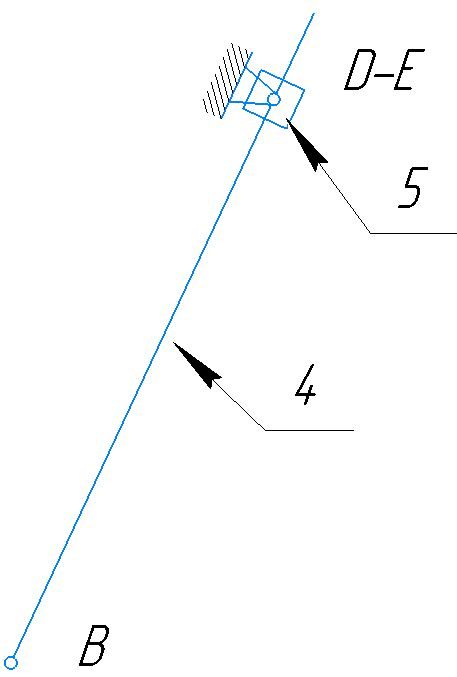
Рисунок 1.2 — Схема структурной группы II-го класса 3-ого вида, образованной звеньями 4 и 5
Шатун 2 и балансир 3 образуют структурную группу II-ого класса. Эта группа включает в себя три кинематические пары: A, B и C. Поскольку все пары (A, B и C) – вращательные, это группа 1-ого вида. Схема данной структурной группы изображена на рисунке 1.3.
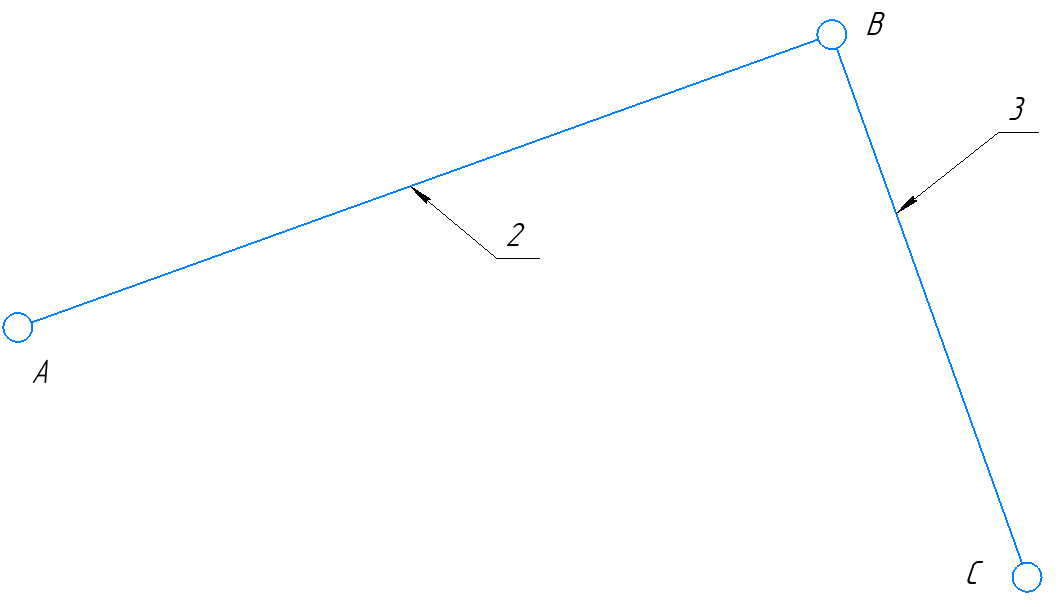
Рисунок 1.3 — Схема структурной группы II-ого класса 1-ого вида, образованной звеньями 2 и 3
Так как степень подвижности механизма W=1, механизм имеет одно входное звено — звено 1, закон движения которого задан. Входное звено 1 со стойкой 6 составляют начальный механизм (механизм I-ого класса). Схема механизма первого класса изображена на рисунке 1.4.
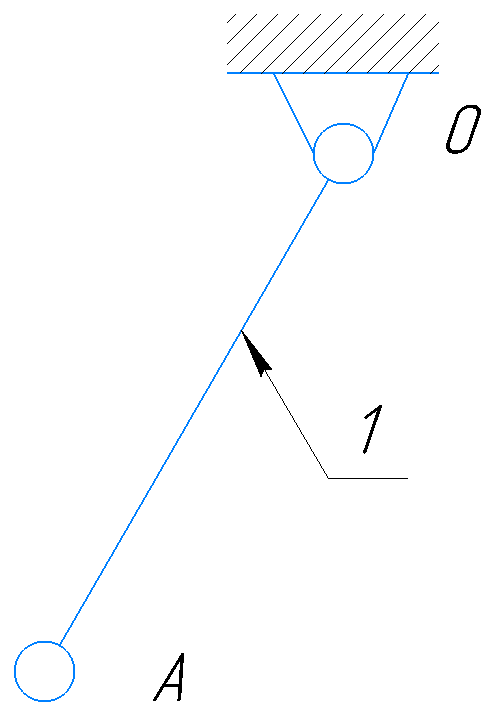
Рисунок 1.4 — Схема механизма первого класса
Таким образом, исследуемый механизм, обладающий одной степенью подвижности, можно рассматривать как образованный путем последовательного присоединения к стойке 6 и ведущему звену 1 двух групп, состоящих из звеньев 2, 3 и 4, 5. По классификации Л.В. Ассура он должен быть отнесен к механизму II-ого класса.