Файл: Методические указания к выполнению курсовой работы Анализ и оптимизация системы автоматического регулирования по дисциплине Автоматика.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 08.11.2023
Просмотров: 140
Скачиваний: 2
СОДЕРЖАНИЕ
1. Цель и задачи курсовой работы
3. Методические указания к выполнению работы
3.2. Описание принципа действия САР
3.3. Построение структурной и аналитической моделей САР
3.4. Оценка устойчивости разомкнутого контура
3.5. Стабилизация разомкнутого контура
3.6. Оценка устойчивости замкнутой САР
3.9. Определение области устойчивости САР
4. Пример выполнения курсовой работы «Анализ и оптимизация системы автоматического регулирования»
4.1 Определение передаточных функций элементов САР «ДПТ»
4.2 Параметры и передаточные функции элементов
5. Построение, запуск и анализ модели САР
5.1 Построение структурной схемы САР
6. Оценка устойчивости и стабилизация разомкнутой САР.Параметрическая оптимизация САР
6.1 . Стабилизация разомкнутой САР
6.2. Предварительная коррекция замкнутой САР ДПТ
7.Структурно-параметрическая оптимизация САР
7.1 Определение настроечных параметров ПИ-регулятора
7.2. Введение ПИ-регулятора в контур управления
7.3. Уточнение настроечных параметров ПИ-регулятора
8.1 Показатели качества переходного режима
8.2 Показатели качества установившегося режима
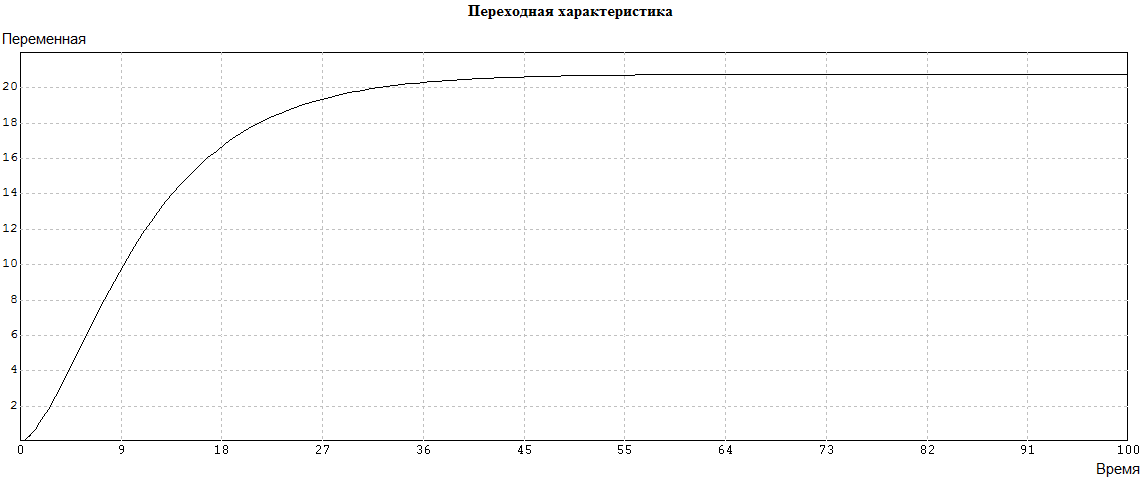
Рис. 6.1.3 Стабилизированная разомкнутая САР.
Таким образом, изменением только коэффициента усиления усилителя не удается получить удовлетворительных характеристик разомкнутого контура. Следовательно, требуется более глубокая стабилизация.
Стабилизация изменением параметров усилителя и звена ОСН. В принципе теперь уже можно переходить к коррекции замкнутой САР, поскольку формально устойчивость разомкнутого контура обеспечена с запасом. Однако, запас этот сравнительно мал, как и мало усиление всего разомкнутого контура, это видно по установившемуся значению переходной функции контура рис. 6.1.3. Поэтому, во избежание возможных трудностей, которые могут возникнуть при окончательной коррекции САР, изменим и параметры звена ОСН. Методом проб и ошибок будем изменять постоянную времени инерционно-дифференцирующего звена ОСН и усиление усилителя.
В результате подбора параметров получим переходную характеристику рис. 6.1.4.
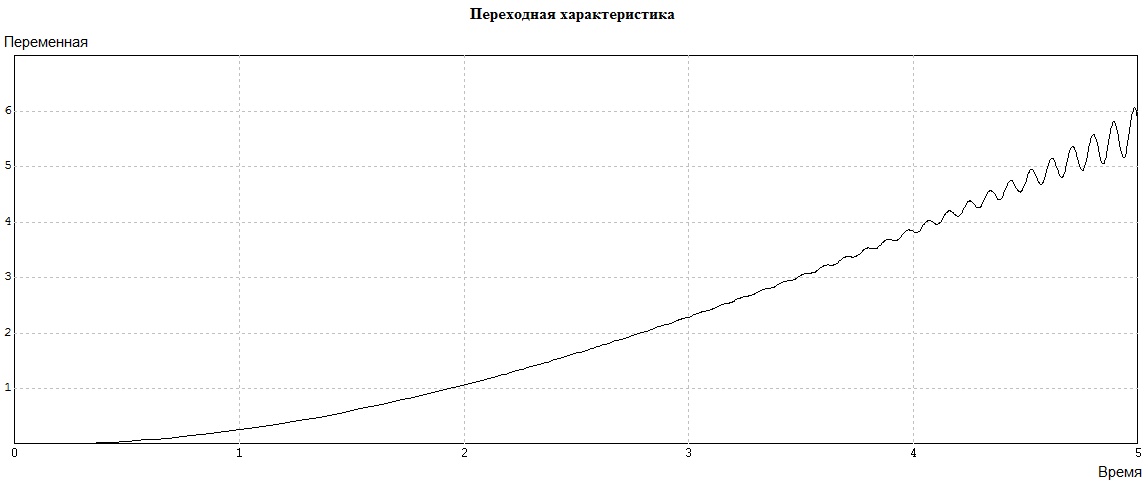
Рис. 6.1.4. Переходная характеристика САР «ДПТ».
Медленное увеличение размаха колебаний переходной функции говорит о том, что разомкнутый контур находится вблизи границы устойчивости. Как видно на рис. 6.1.4, после второй коррекции, состоявшей в уменьшении в 100 раз постоянной времени звена ОСН, значение коэффициента усиления усилителя, при котором разомкнутый контур находится вблизи границы устойчивости, повысилось с 0,17 до 0,38.
Остается обеспечить запас устойчивости по амплитуде контура местной обратной связи путем уменьшения коэффициента усиления усилителя.
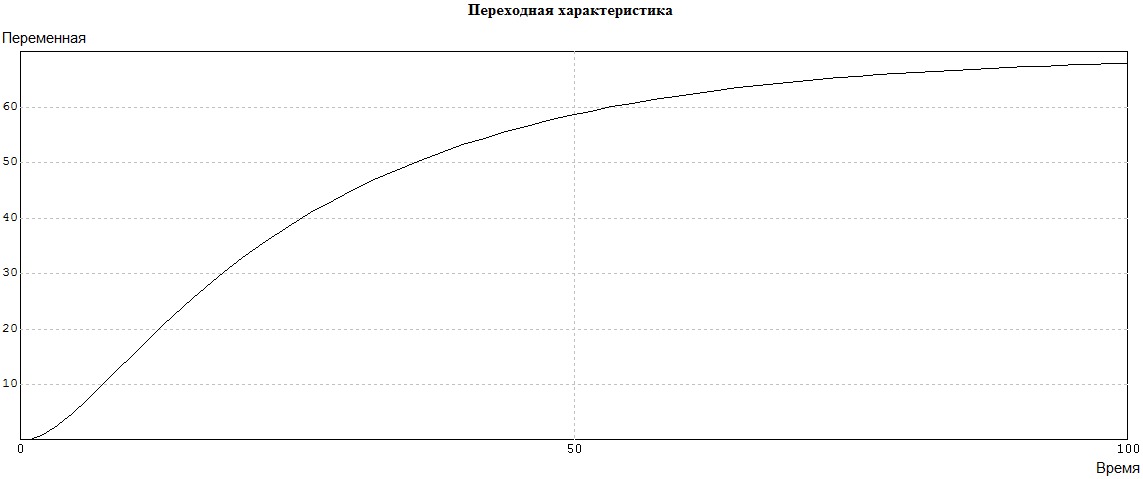
Рис. 6.1.5. Окончательно стабилизированный разомкнутый контур САР «ДПТ».
Усиление усилителя уменьшено по сравнению с его значением в критическом режиме с 0,38 до 0,12. Результирующее усиление разомкнутого контура всей САР составляет примерно 68 единиц, что видно из установившегося значения переходной функции.
Итак, разомкнутая САР ЧВ «ДПТ» стабилизирована. Поэтому устойчивость замкнутой САР можно анализировать с помощью критерия Найквиста.
Выясним, окажется ли устойчивой замкнутая САР «ДПТ», разомкнутый контур которой только что стабилизирован. Для этого замкнем обратную связь и проверим, как поведет себя переходная характеристика САР:
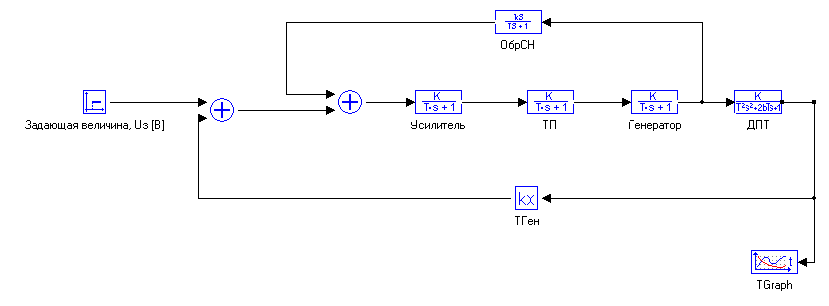
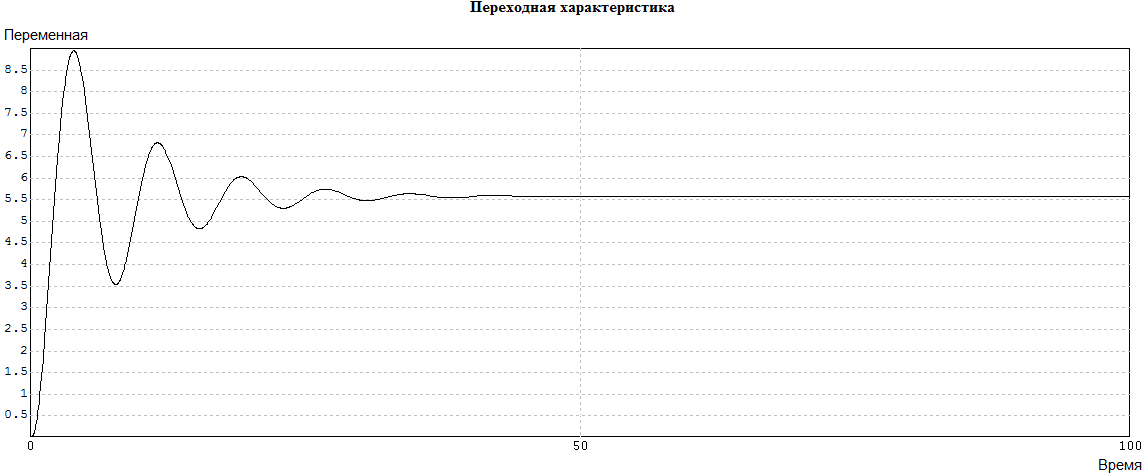
Рис. 6.1.6. САР «ДПТ» после стабилизации разомкнутого контура.
Система устойчива, но колебательность переходной характеристики чрезмерна. Замкнутая САР требует коррекции.
Как видно на рис. 6.1.6, установившееся значение переходной функции составляет примерно 5,6 об/с, что на 4 % меньше точного значения, равного 1/Wтг(p)|p=0 = 1/0,173 = 5,78 об/с. Т.о. точность полученной системы и в установившемся режиме неудовлетворительна.
6.2. Предварительная коррекция замкнутой САР ДПТ
Вернемся к разомкнутой САР. Частотные характеристики строятся именно для разомкнутого контура, а по ним можно судить об устойчивости замкнутой САР, пользуясь критерием устойчивости Найквиста.
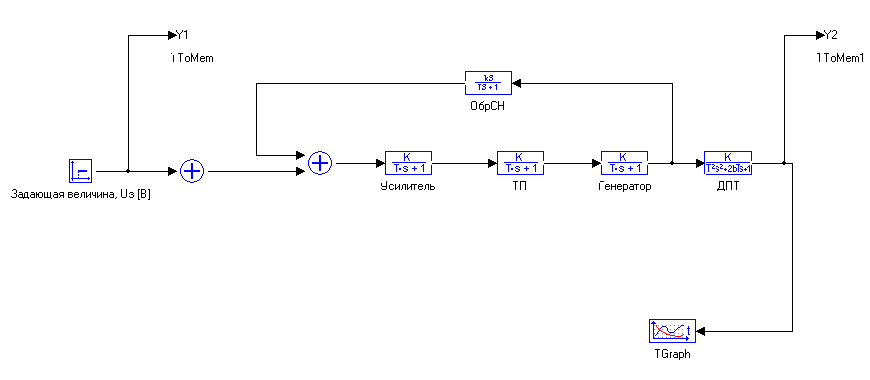
Рис. 6.2.1. САР «ДПТ»
Предварительная коррекция замкнутой САР осуществляется посредством изменения и оптимизации значения коэффициента усиления разомкнутого контура. Технически этот коэффициент можно менять, установив в схеме рис. 6.1.5 П-регулятор между сумматорами и меняя его усиление, а контролировать его значение - по установившемуся значению переходной функции. Изменение коэффициента усиления контура управления приводит к вертикальным смещениям ЛАЧХ и не влияет на ЛФЧХ.
Построение и анализ ЛАЧХ и ЛФЧХ. Прежде чем непосредственно строить ЛАЧХ и ЛФЧХ (логарифмические амплитудно-частотную и фазо-частотную характеристики) необходимо задать пределы частотного диапазона, в котором будут построены характеристики.
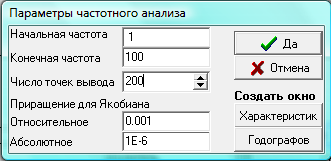
Рис. 6.2.2 Задание начала и конца частотного диапазона и числа шагов для построения ЛАЧХ и ЛФЧХ
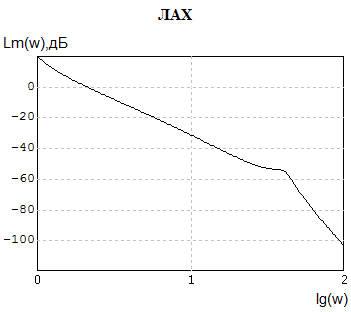
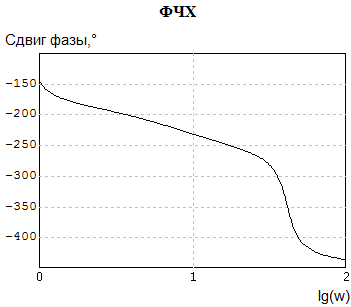
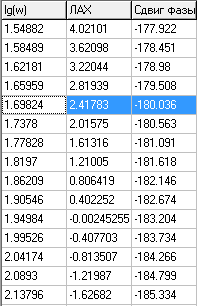
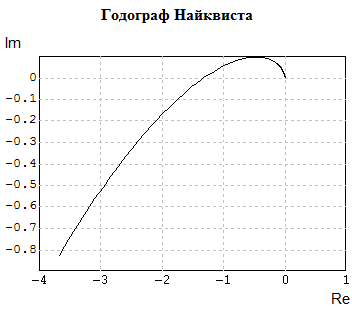
Рис. 6.2.3 Построение графиков ЛАЧХ и ЛФЧХ, годографа Найквиста
Из рис. 6.2.3 следует, что необходимо корректировать САР. Это можно сделать путем уменьшения коэффициента усиления с тем, чтобы обеспечить необходимые запасы устойчивости.
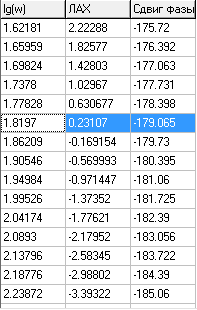
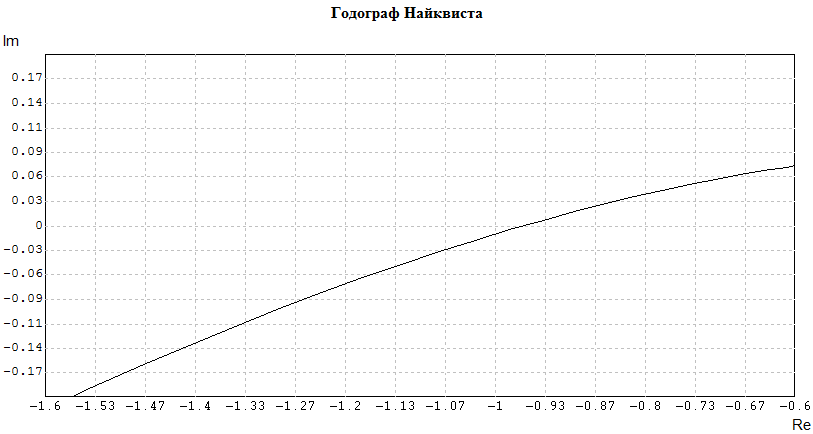
Рис. 6.2.4 Обеспечение запасов устойчивости по фазе и амплитуде смещением ЛАЧХ вниз, т.е. уменьшением усиления контура.
Как видно на рис.6.2.4 запасы устойчивости обеспечены, но усиление контура мало (уменьшено в 2,6 раз), что говорит о низком качестве работы полученной САР в установившемся режиме.
Уменьшение усиления контура обеспечивается в схеме модели введением усилителя с усилением 0,38 = 1/2,6. Этот усилитель может рассматриваться как П-регулятор.
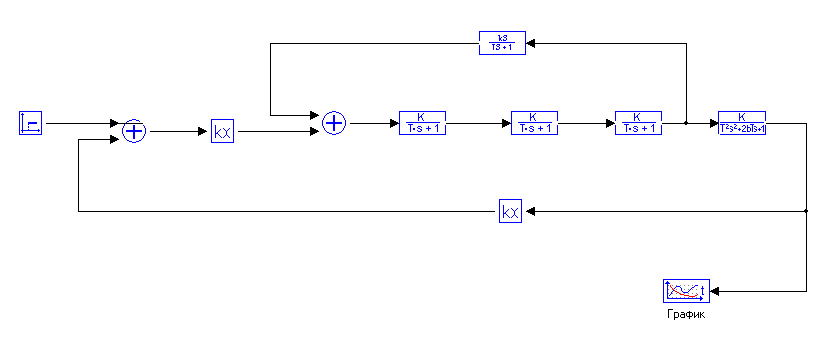
Рис. 6.2.5 Схема с введением П-регулятора.
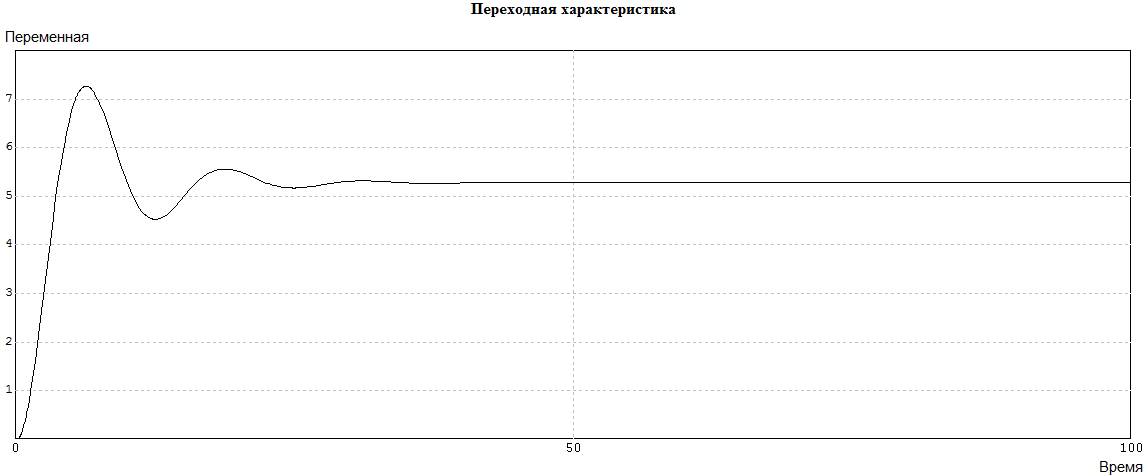
Рис. 6.2.6. Переходная характеристика предварительно скорректированной САР
Характеристика свидетельствует о сравнительно хорошем качестве переходного режима САР и о неудовлетворительном качестве ее работы в установившемся режиме.
При безошибочной работе в установившемся режиме, отрабатывая единичную ступеньку, САР обеспечивала бы на выходе 1/0,173 = 5,78 об/с, в то время, как полученная САР обеспечивает только 5.3 об/с (рис. 6.2.6). 0,173 – коэффициент усиления тахогенератора, установленного в обратной связи главного контура управления. Относительная ошибка регулирования составляет (5,78 -5,3 )/ 5,78 = 0,08 = 8 %.
Т.о. оптимизация усиления контура не позволяет получить САР удовлетворительного качества. Поэтому следует провести более серьезную коррекцию САР на основе структурно-параметрической оптимизации. В данном случае это означает, что нужно ввести ПИ-регулятор в контур управления вместо П-регулятора и оптимизировать его настроечные параметры.
7.Структурно-параметрическая оптимизация САР
В относительно простых системах введение ПИ-регулятора, как правило, решает все проблемы.
7.1 Определение настроечных параметров ПИ-регулятора
Задача оптимизации сводится к нахождению настроечных параметров ПИ-регулятора: постоянной времени и коэффициента усиления.
Передаточная функция ПИ-регулятора имеет вид:
где: kp – коэффициент усиления ПИ-регулятора;
Tp – постоянная времени ПИ-регулятора.
Для определения постоянной времени регулятора следует взять нижнюю ЛАЧХ, для которой выполнены требования к запасам по фазе и амплитуде, и провести к ней касательные с наклонами 0 дБ/дек и -20 дБ/дек:
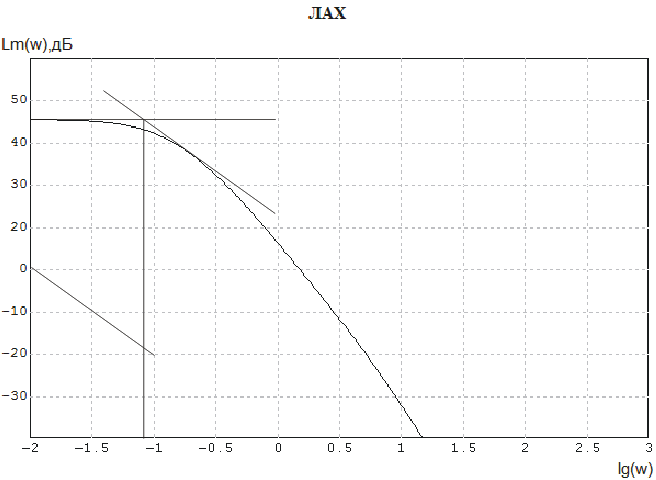
Рис. 7.1.1. Определение постоянной времени ПИ-регулятора по ЛАЧХ системы
Для системы рис.7.1.1 выполнены требования к запасам устойчивости по фазе и амплитуде. Частота точки сопряжения касательных с наклоном 0 дБ/дек и -20 дБ/дек является обратной величиной к искомой постоянной времени ПИ-регулятора. 1/Т = 0,13 рад/с. Т = 77 с.
Для повышения точности определений ЛАЧХ может быть построена в диапазоне двух декад. Значение коэффициента kp =0,5 является удовлетворительным начальным приближением в случае, если требования к запасам по фазе и амплитуде выполнены. Конечно, в коэффициенте усиления ПИ-регулятора нужно учесть и усиление П-регулятора, равное 0,38. В результате, значение коэффициента kр выбираем равным kр= 0,38 ·0,5 = 0,19 единиц.
7.2. Введение ПИ-регулятора в контур управления
Для этого заменяем П-регулятор в схеме рис.6.2.5 на ПИ-регулятор, используя блок общего вида.
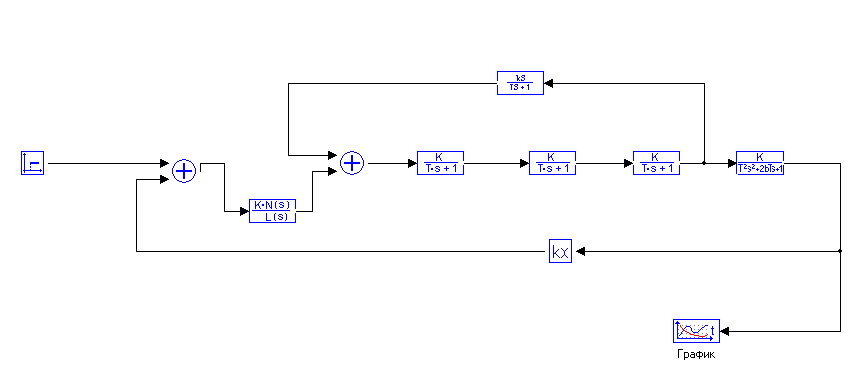 Рис. 7.2.1. САР «ДПТ» с ПИ-регулятором
Рис. 7.2.1. САР «ДПТ» с ПИ-регуляторомВремя регулирования и перерегулирование можно увидеть на укрупненном окне переходной характеристики:
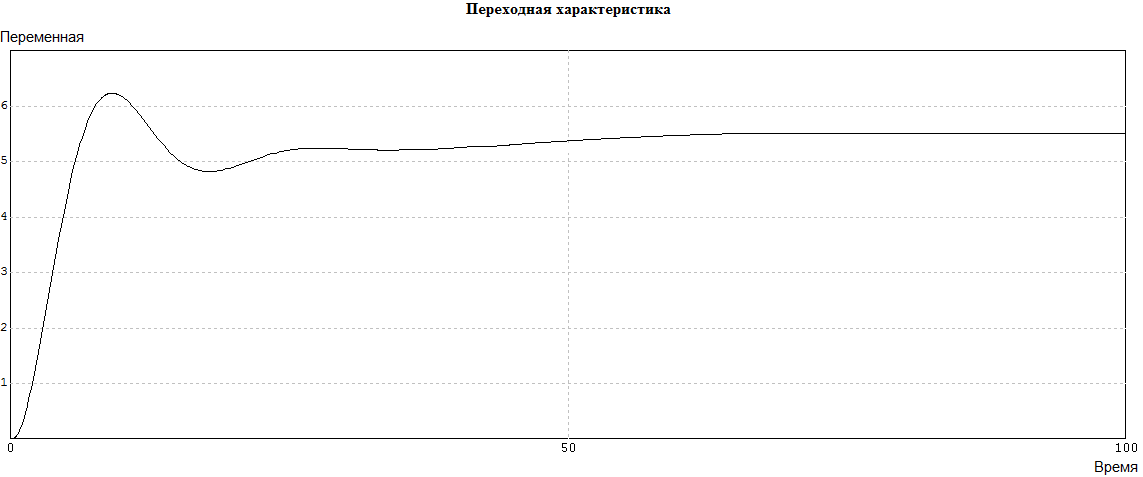
Рис. 7.2.2. Переходная характеристика САР «ДПТ» с ПИ-регулятором.
Как видно из рис.7.2.2, перерегулирование выше 5 %. Установившееся значение ошибки регулирования равно нулю. В общем САР имеет уже неплохое качество.
7.3. Уточнение настроечных параметров ПИ-регулятора
Поскольку использованный для коррекции метод определения настроечных параметров ПИ-регулятора приближенный, то несколько улучшить качество САР можно уточнением значений коэффициента усиления регулятора и его постоянной времени в пределах нескольких десятков процентов. Методом проб и ошибок можно установить, что изменение постоянной времени ухудшает переходную характеристику, а уменьшение коэффициента усиления до 0,12 позволяет уменьшить перерегулирование, что положительно сказывается на времени регулирования.
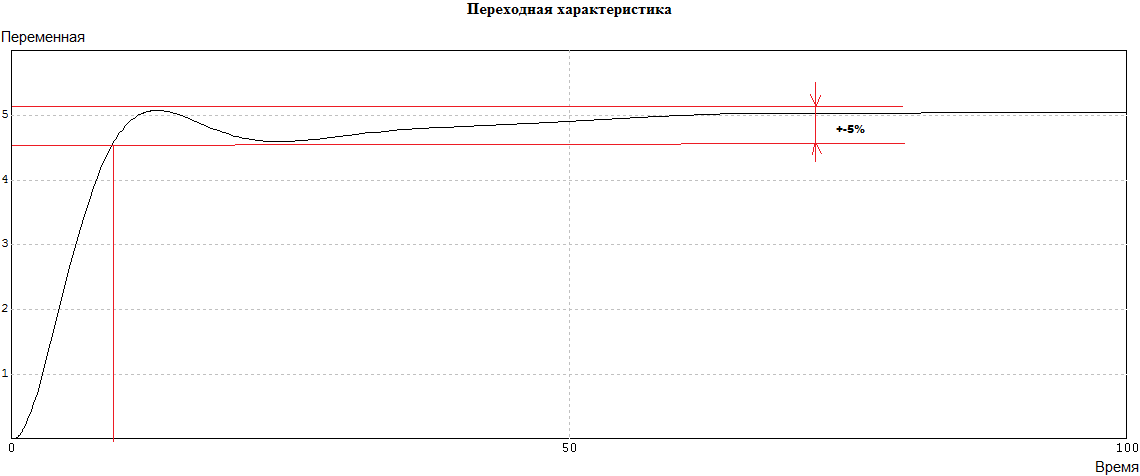
Рис. 7.3.1. Переходная функция САР «ДПТ».
Некоторое уменьшение усиления ПИ-регулятора позволило уменьшить перерегулирование, в результате чего переходная функция САР попав в 10 % - процентный коридор уже из него не выходит. Формально это позволило уменьшить время регулирования с 20 с до 10 секунд. Отметим, что двигатель под управлением САР начинает изменять частоту более плавно по сравнению с тем, когда на него непосредственно поступает ступенчатое приращение напряжения якоря, а время регулирования САР практически такое же, как и у ДПТ в автономной работе.
В завершение приведем ЛАЧХ и ЛФЧХ разомкнутого контура оптимизированной САР «ДПТ»:
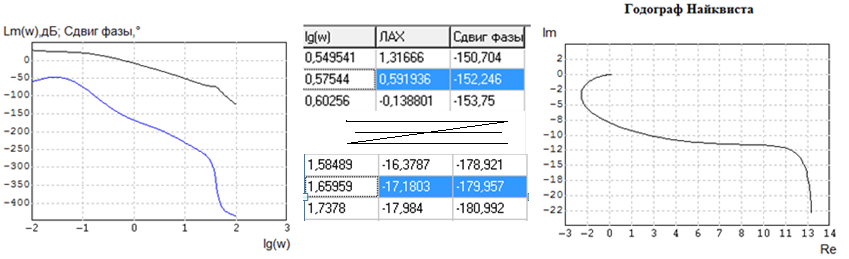 Рис. 7.3.2. ЛАЧХ и ЛФЧХ, годограф Найквиста разомкнутого контура оптимизированной САР «ДПТ»
Рис. 7.3.2. ЛАЧХ и ЛФЧХ, годограф Найквиста разомкнутого контура оптимизированной САР «ДПТ»ЛФЧХ стремится при увеличении частоты к -4500. ЛАЧХ неограниченно линейно растет с уменьшением частоты. Запасы устойчивости и по фазе, и по амплитуде – хорошие. Переходная характеристика разомкнутого контура увеличивается со временем, что объясняется наличием интегратора в контуре, входящего составной частью в ПИ-регулятор.
8. Оценка качества САР «ДПТ»
Понятие качество линейной САР объединяет точность ее слежения за задающим сигналом и подавления возмущений, а также быстродействие.
Качество САР оценивается прямыми и (или) косвенными показателями переходного и установившегося режимов.
Косвенные показатели это запасы устойчивости САР по фазе и амплитуде и порядок астатизма. Для статических систем следует назвать и коэффициент усиления контура. Существует и множество других косвенных показателей качества [1].
Прямые показатели качества разделяются на показатели переходного режима – это время регулирования tp и перерегулирование σ %, и показатели установившегося режима: коэффициенты ошибок по положению с0, по скорости с1 и по ускорению с2.
8.1 Показатели качества переходного режима
Показатели качества переходного режима определяются по переходной характеристике САР. Для САР «ДПТ» по рис. 7.3.2 определены tp = 10 с и σ = 4 % (это относительное превышение первого максимума переходной функции над ее установившимся значением).