Файл: Методические указания к выполнению курсовой работы Анализ и оптимизация системы автоматического регулирования по дисциплине Автоматика.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 08.11.2023
Просмотров: 139
Скачиваний: 2
СОДЕРЖАНИЕ
1. Цель и задачи курсовой работы
3. Методические указания к выполнению работы
3.2. Описание принципа действия САР
3.3. Построение структурной и аналитической моделей САР
3.4. Оценка устойчивости разомкнутого контура
3.5. Стабилизация разомкнутого контура
3.6. Оценка устойчивости замкнутой САР
3.9. Определение области устойчивости САР
4. Пример выполнения курсовой работы «Анализ и оптимизация системы автоматического регулирования»
4.1 Определение передаточных функций элементов САР «ДПТ»
4.2 Параметры и передаточные функции элементов
5. Построение, запуск и анализ модели САР
5.1 Построение структурной схемы САР
6. Оценка устойчивости и стабилизация разомкнутой САР.Параметрическая оптимизация САР
6.1 . Стабилизация разомкнутой САР
6.2. Предварительная коррекция замкнутой САР ДПТ
7.Структурно-параметрическая оптимизация САР
7.1 Определение настроечных параметров ПИ-регулятора
7.2. Введение ПИ-регулятора в контур управления
7.3. Уточнение настроечных параметров ПИ-регулятора
8.1 Показатели качества переходного режима
8.2 Показатели качества установившегося режима
Федеральное государственное образовательное учреждение
высшего профессионального образования
«Костромская государственная сельскохозяйственная академия»
Кафедра ТОЭ и автоматики
Методические указания к выполнению
курсовой работы
«Анализ и оптимизация системы автоматического регулирования»
по дисциплине «Автоматика»
для студентов, обучающихся по направлению подготовки дипломированного специалиста 110302 «Электрификация и автоматизация сельского хозяйства»
Кострома 2008
УДК 621.3.01
Анализ и оптимизация системы автоматического регулирования
Составители: А.В. Рожнов, канд. техн. наук, доцент
Рекомендовано методической комиссией факультета электрификации и автоматизации сельского хозяйства (протокол № 6 от 30.06.08).
Рецензент: Ф.А. Новожилов, канд. техн. наук, доцент
Даны методические указания к выполнению курсовой работы и пример расчетов работы по методике, предложенной к.т.н. Федосовым Б.Т. с применением программного комплекса «МОДЕЛИРОВАНИЕ В ТЕХНИЧЕСКИХ УСТРОЙСТВАХ» ПК «МВТУ, версия 3.5), предназначенного для детального исследования и анализа динамических процессов в ядерных и тепловых энергетических установках, в системах автоматического управления (САУ), в следящих приводах и роботах, в любых технических системах, описание динамики которых может быть реализовано методами структурного моделирования.
Оглавление
1. Цель и задачи курсовой работы 6
2. Задание и исходные данные 6
3. Методические указания к выполнению работы 8
3.1. Анализ исходных данных 9
3.2. Описание принципа действия САР 9
3.3. Построение структурной и аналитической моделей САР 9
3.3.1. Построение структурной схемы САР 10
3.3.2. Определение передаточных функций элементов САР 10
3.4. Оценка устойчивости разомкнутого контура 10
3.5. Стабилизация разомкнутого контура 11
3.6. Оценка устойчивости замкнутой САР 11
3.7. Коррекция замкнутой САР 11
3.8. Оценка качества САР 12
3.9. Определение области устойчивости САР 13
3.10. Заключение 13
4. Пример выполнения курсовой работы «Анализ и оптимизация системы автоматического регулирования» 13
4.1 Определение передаточных функций элементов САР «ДПТ» 13
4.1.1. Функциональная схема и принцип действия САР 13
4.2 Параметры и передаточные функции элементов 15
5. Построение, запуск и анализ модели САР 15
5.1 Построение структурной схемы САР 15
5.2Первый запуск модели 16
6. Оценка устойчивости и стабилизация разомкнутой САР. Параметрическая оптимизация САР 17
6.1 . Стабилизация разомкнутой САР 17
6.2. Предварительная коррекция замкнутой САР ДПТ 22
7.Структурно-параметрическая оптимизация САР 27
7.1 Определение настроечных параметров ПИ-регулятора 27
7.2. Введение ПИ-регулятора в контур управления 28
7.3. Уточнение настроечных параметров ПИ-регулятора 29
8. Оценка качества САР «ДПТ» 30
8.1 Показатели качества переходного режима 31
8.2 Показатели качества установившегося режима 31
8.3 САР «ДПТ» в режиме слежения и стабилизации 32
Список использованных источников: 34
Задания и методические указания к выполнению курсовой работы составлены в соответствии со стандартом специальности 110302 «Электрификация и автоматизация сельского хозяйства»
1. Цель и задачи курсовой работы
Цель работы: оптимизация типичной линейной системы автоматического регулирования (САР) с использованием программного пакета моделирования систем МВТУ.
Задачи работы:
-
анализ задания и исходных данных; -
описание принципа действия САР; -
построение структурно-аналитической модели САР; -
оценка устойчивости и стабилизация САР; -
оптимизация модели; -
оценка качества модели.
2. Задание и исходные данные
Тема курсовой работы:
"Анализ и оптимизация САР частоты вращения вала двигателя постоянного тока (САР ЧВ ДПТ) – САР «ДПТ».
Задание:
построить модель САР, исследовать ее, оптимизировать и оценить качество полученной САР.
Исходные данные:
функциональная схема САР «ДПТ» и параметры ее элементов.
Функциональная схема САР «ДПТ»приведена на рис.2.1.
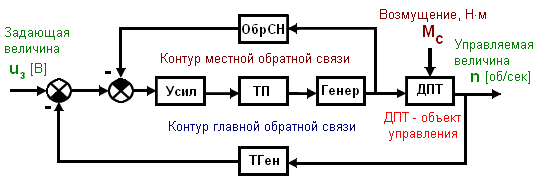 Рис.2.1 Исходная функциональная схема САР «ДПТ»Объект управления - двигатель постоянного тока, управляемая величина - частота вращения вала ДПТ.
Рис.2.1 Исходная функциональная схема САР «ДПТ»Объект управления - двигатель постоянного тока, управляемая величина - частота вращения вала ДПТ.Расшифровка обозначений рис.2.1: У - усилитель; ТП - тиристорный преобразователь; Г - генератор; ДПТ - двигатель постоянного тока; ТГ - тахогенератор; ОСН - гибкая обратная связь по напряжению. ДПТ – двигатель постоянного тока независимого возбуждения. ДПТ – объект управления, его выходная величина, частота вращения вала n должна соответствовать заданию. uз - напряжение задания, в соответствии с которым должна изменяться частота n вращения вала ДПТ. Мc - возмущающий момент силы, приложенный к валу ДПТ от той машины, которую он приводит в действие
Параметры и передаточные функции элементов (N - номер варианта задания).
ky = (0,5+0,9N) ; Ty = (0,07 + 0.005N), с.
Передаточная функция усилителя [1]:
ТП - тиристорный преобразователь моделируется апериодическим звеном с передаточной функцией и параметрами [1]:
с параметрами: kтп = (1,5+2,2N) ; Tтп = (0,25 + 0,004N), с.
Г - генератор, апериодическое звено [1]:
с параметрами: kг = 0,1(4 + 0,2N) ; Tг = 0,04 (8 + N),с.
ОСН - гибкая обратная связь по напряжению, инерционно-дифференцирующее звено [1]:
с параметрами: kосн = 0,01(5 + 0,2N); Tосн = 0,05(3 + N), c.
ТГ - тахогенератор, усилительное (пропорциональное) звено [1]:
где: kтг = 0,002(2,5 + 3N), [В•с/об].
ДПТ- двигатель постоянного тока, колебательное звено. Передаточная функция ДПТ по каналу управления, определяющая влияние напряжения на якоре двигателя на частоту вращения его вала [1]:
где: kду = 0,1(10 + N), [об/(с·В)]; kдв = 0,04(14 + N), [об/(с·Н·м)]; Tя = 0,01 (5 + 0,35N), с; Tм = 0,2 (4 + 0,1N), с.
по каналу возмущения [1]:
3. Методические указания к выполнению работы
Работа представляемая к защите должна содержать:
-
титульный лист; -
аннотацию; -
содержание; -
введение; -
основную часть, разбитую на разделы; -
заключение; -
список использованных источников; -
приложения.
3.1. Анализ исходных данных
Выполняется с целью установления достаточности исходных данных для реализации модели и их непротиворечивости.
Примечание: анализ проводится в процессе выполнения всей работы и вносится в пояснительную записку после ее окончания. Если выясняется, что каких-то данных недостаточно, студент должен обоснованно ввести их. В случае противоречивости исходных данных, необходимо найти компромиссное решение и обосновать его.
3.2. Описание принципа действия САР
Принцип действия САР кратко описывается по функциональной схеме.
Цель описания принципа действия САР состоит в пояснении назначения и состава САР, а также в качественной иллюстрации ее работоспособности. Следует показать, что рассматриваемая САР осуществляет слежение за величиной сигнала, подаваемого на ее устройство сравнения. Кроме того, необходимо отметить, что САР компенсирует возникающие возмущения, т.е. решает и задачу стабилизации.
Решение задач слежения и стабилизации рассматриваемой системой возможно вследствие наличия в ней контура главной обратной связи, реализующего принцип управления по отклонению.
Описание состоит из двух подразделов. В первом рассматривается работа САР в статике. Следует показать, что САР обеспечивает слежение: соответствие (пропорциональность) частоты вращения вала ДПТ задающей величине при постоянных задающем и возмущающем воздействиях.
Во втором подразделе следует показать, что слежение обеспечивается и в динамике: при изменении задания и (или) возмущения, САР стремится поддержать значение частоты вращения вала, соответствующим заданию. Назначение раздела - показать качественно (т.е. не количественно, словами) преимущество управления двигателем с использованием САР по сравнению с непосредственным управлением. Использование САР позволяет повысить быстродействие управления посредством маломощных сигналов задания и точность поддержания частоты вращения.
3.3. Построение структурной и аналитической моделей САР
Моделирование выполняется с использованием программного пакета «МВТУ».
Цель моделирования: обеспечить возможность анализа, а по его результатам и оптимизации САР.
3.3.1. Построение структурной схемы САР
Вынести на рабочее пространство МВТУ блоки, соответствующие функциональной схеме.
Построить САР ДПТ. На вход подать ступенчатое воздействие. Выход усилителя обратной связи подключить к блоку «Временной график».
3.3.2. Определение передаточных функций элементов САР
Определить значения параметров передаточных функций элементов в соответствии с номером варианта. Ввести эти значения в соответствующие блоки. Рационально разместить блоки диаграммы, предусмотреть место для надписей и комментариев.
3.4. Оценка устойчивости разомкнутого контура
Разомкнутый контур САР состоит из устойчивых элементов, но, в свою очередь, содержит контур местной обратной связи. Следовательно, САР может быть неустойчивой в разомкнутом состоянии.
Оценка устойчивости разомкнутой САР осуществляется с целью проверки выполнения необходимого условия практического применения критерия Найквиста: разомкнутый контур должен быть устойчивым. Критерий Найквиста выбран для оценки устойчивости замкнутой САР потому, что, инструменты этого критерия (логарифмические частотные характеристики) будут применены при структурно-параметрической оптимизации САР. Последнее является определяющим в выборе критерия Найквиста для оценки устойчивости замкнутой САР. Частотные характеристики разомкнутого контура САР не только позволяют судить о степени устойчивости замкнутой САР и, косвенно, о ее качестве, но и вырабатывать меры и средства оптимизации САР.
Традиционно, устойчивость разомкнутого контура определялась с помощью критериев Михайлова или Гурвица. Однако, имея в своем распоряжении программный комплекс МВТУ, можно непосредственно по виду переходной характеристики определить устойчива ли система. Более того, по виду переходной характеристики качественно можно оценить и степень устойчивости.
Запустить программу на счет, определить по виду переходной характеристики устойчив ли разомкнутый контур.
3.5. Стабилизация разомкнутого контура
Стабилизация разомкнутой САР осуществляется с целью обеспечения выполнения необходимого условия практического применения критерия Найквиста: разомкнутый контур должен быть устойчивым с запасом по амплитуде в диапазоне 6 - 20 дБ (в 2 - 10 раз)..
Изменяя параметры элементов контура местной обратной связи: коэффициенты усиления усилителя и тиристорного преобразователя, а возможно, и постоянной времени звена ОСН, добиться, чтобы переходный процесс стал апериодическим с перерегулированием не более 5 ÷ 20 %.
Возможный способ решения этой задачи: вывести разомкнутый контур на границу устойчивости, а затем уменьшить коэффициент усиления усилителя в 2 ÷ 10 раз. В предлагаемой методике контур выводится на границу устойчивости для того, чтобы иметь точку начала отсчета для обеспечения нужного запаса устойчивости по амплитуде.
Может оказаться целесообразным выполнить стабилизацию в два этапа: на первом изменять только коэффициенты усиления и если результаты окажутся недостаточно качественными, то на втором этапе можно уменьшить и постоянную времени звена ОСН (обратной связи по напряжению).