Файл: Методические указания к выполнению курсовой работы Анализ и оптимизация системы автоматического регулирования по дисциплине Автоматика.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 08.11.2023
Просмотров: 137
Скачиваний: 2
СОДЕРЖАНИЕ
1. Цель и задачи курсовой работы
3. Методические указания к выполнению работы
3.2. Описание принципа действия САР
3.3. Построение структурной и аналитической моделей САР
3.4. Оценка устойчивости разомкнутого контура
3.5. Стабилизация разомкнутого контура
3.6. Оценка устойчивости замкнутой САР
3.9. Определение области устойчивости САР
4. Пример выполнения курсовой работы «Анализ и оптимизация системы автоматического регулирования»
4.1 Определение передаточных функций элементов САР «ДПТ»
4.2 Параметры и передаточные функции элементов
5. Построение, запуск и анализ модели САР
5.1 Построение структурной схемы САР
6. Оценка устойчивости и стабилизация разомкнутой САР.Параметрическая оптимизация САР
6.1 . Стабилизация разомкнутой САР
6.2. Предварительная коррекция замкнутой САР ДПТ
7.Структурно-параметрическая оптимизация САР
7.1 Определение настроечных параметров ПИ-регулятора
7.2. Введение ПИ-регулятора в контур управления
7.3. Уточнение настроечных параметров ПИ-регулятора
8.1 Показатели качества переходного режима
8.2 Показатели качества установившегося режима
3.6. Оценка устойчивости замкнутой САР
Оценка степени устойчивости замкнутой САР проводится с целью определения необходимых мер и средств оптимизации САР. Оценка осуществляется с помощью логарифмического варианта критерия Найквиста. Это позволяет не только косвенно, по запасам устойчивости, судить о степени устойчивости САР, но и численно определить необходимые для предварительной стабилизации изменения значений параметров элементов.
Необходимо выделить элементы разомкнутого контура и вызвать ЛАЧХ и ЛФЧХ. Растянуть и оформить графики. Определить запасы по фазе и амплитуде. Сравнить их значения с допустимыми.
3.7. Коррекция замкнутой САР
Коррекция осуществляется с целью получения работоспособной САР путем оптимизации коэффициента усиления контура управления. Если этого оказывается недостаточно, то в главный контур вводится и настраивается ПИ-регулятор.
Формально, подбор наилучшего значения коэффициента усиления следует называть параметрической оптимизацией системы, в то время как введение ПИ-регулятора и определение его наилучших настроечных параметров является простым случаем структурно-параметрической оптимизации САР, поскольку во втором случае изменяется структурная схема.
По ЛАЧХ и ЛФЧХ разомкнутого контура определить необходимую величину изменения коэффициента усиления в дБ, с тем, чтобы запасы устойчивости вошли в требуемые интервалы, предпочтительнее ближе к их верхним границам. По фазе это 350 ÷ 650 и по амплитуде 6 ÷ 12 ÷ 20 дБ. Изменение усиления контура следует провести путем введения П-регулятора (усилителя) непосредственно за сумматором главного контура управления. Если при этом усиление контура окажется меньше 20 дБ, следует ввести в контур главной обратной связи, сразу после П-регулятора, ПИ-регулятор с передаточной функцией:
где: kp – коэффициент усиления ПИ-регулятора; Ти – постоянная времени интегратора, обратно пропорциональная частоте сопряжения аппроксимаций участков ЛАЧХ с наклонами 0 дБ/дек и -20 дБ/дек соответственно.
Примечание. Усиление П-регулятора можно учесть в ПИ-регуляторе, с тем, чтобы уменьшить количество блоков в схеме.
После корректировки усиления или, может быть, введения ПИ-регулятора, следует заново выделить элементы разомкнутого контура, построить ЛАЧХ и ЛФЧХ и убедиться в том, что запасы по фазе и амплитуде соответствуют требованиям. Коэффициент усиления контура в астатической системе напрямую не регламентируется, а косвенно он характеризует быстродействие системы.
3.8. Оценка качества САР
Оценка выполняется с целью сравнения показателей качества переходного и установившегося режимов оптимизированной САР с требованиями, предъявляемыми к САР заказчиком.
Оценка качества переходного режима САР осуществляется по переходной функции замкнутой САР.
Замкнуть главный контур управления, переключить блок «Временной график» на выход САР, к выходу ДПТ.
Запустить на счет.
Оценить время регулирования, перерегулирование. Перерегулирование хорошей системы находится в пределах 0% ÷ 20 %. Если полученное перерегулирование превышает величину 40%, следует вернуться к коррекции системы и уменьшить усиление контура.
3.9. Определение области устойчивости САР
Знание диапазона изменения некоторого параметра системы управления, в котором система сохраняет устойчивость, позволяет оценить восприимчивость системы к возмущениям, приводящим к отклонению исследуемого параметра от его оптимального значения. На практике здесь потребуется оценить и влияние возмущающих факторов на выбранный, названный выше параметр.
В данной работе предлагается оценить диапазон изменения коэффициента усиления контура, в котором САР сохраняет устойчивость.
3.10. Заключение
Здесь следует кратко изложить основные результаты работы, сделать выводы и дать рекомендации. Смысл выводов - достигнута ли цель работы и решены ли ее задачи. Рекомендации могут быть как по оптимизации методов решения поставленных задач, способам и возможному дальнейшему улучшению системы, так и по ее применению.
4. Пример выполнения курсовой работы «Анализ и оптимизация системы автоматического регулирования»
4.1 Определение передаточных функций элементов САР «ДПТ»
4.1.1. Функциональная схема и принцип действия САР
САР ЧВ «ДПТ» – система автоматического регулирования частоты вращения вала двигателя постоянного тока независимого возбуждения. Заданием определена функциональная схема САР (рис. 2.1). САР представляет собой замкнутый контур главной обратной связи, который осуществляет управление по отклонению. В контуре имеется и гибкая местная обратная связь, которая предназначена для стабилизации САР, способствует тому, чтобы САР была достаточно устойчивой. Наличие обратных связей в САР свидетельствует о том, что система может быть и неустойчивой, поэтому анализ САР должен включать оценку ее устойчивости и, при необходимости, выбор мер и средств по ее стабилизации.

Рис.4.1. Исходная функциональная схема САР «ДПТ». Объект управления - двигатель постоянного тока, управляемая величина - частота вращения вала ДПТ.
Следует отметить, что в предлагаемой схеме фактически изменять можно только параметры усилителя и звена местной обратной связи. Эти элементы введены в схему как раз для того, чтобы обеспечить возможность ее коррекции. Не исключено, что параметры звена обратной связи по напряжению (ОСН) заданы неудачно и потребуют существенной коррекции.
Работа САР «ДПТ» в статике. В статике входные, а, следовательно, и выходные, сигналы САР постоянны. На первый, левый сумматор контура главной обратной связи, его сравнивающее устройство, подается задающая величина и величина с выхода тахогенератора, пропорциональная частоте вращения вала. Разностный сигнал e = uз – yтг = uз - kтгn, имеющий малую величину, усиливается усилителем, тиристорным преобразователем и генератором, в результате чего получается входной, управляющий сигнал ДПТ (двигателя постоянного тока, объекта управления), т.е. напряжение на якоре. Вследствие наличия этого напряжения вал двигателя вращается. Поскольку произведение коэффициентов усиления усилителя, тиристорного преобразователя и генератора велико, то получить некоторое конкретное управляющее напряжение на якоре двигателя можно только в том случае, если разностный сигнал e – мал. Это значит, что частота n вращения вала с некоторой точностью пропорциональна заданию uз. Звено обратной связи инерционно-дифференцирующее, поскольку обратная связь по напряжению гибкая, и поэтому оно не влияет на работу САР в статике.
Таким образом САР выполняет свои функции: обеспечивает слежение в статике, поддерживая частоту вращения вала пропорциональной заданию.
Работа САР «ДПТ» в динамике. Изменение задания в первый момент времени приводит к соответствующему росту отклонения, поскольку звенья перед объектом и сам объект обладают инерционностью и поэтому частота вращения вала не может измениться мгновенно. Изменение отклонения, будучи усиленным усилителем, тиристорным преобразователем и генератором, с учетом их инерционности приводит к постепенному изменению управляющей величины – напряжения на якоре, которое плавно изменяет частоту вращения вала так, что ошибка слежения, т.е. отклонение, устремляется к нулю. Обратная связь по напряжению стабилизирует САР и повышает ее быстродействие. Таким образом осуществляется слежение.
Изменение возмущения, момента на валу двигателя, приводит к изменению частоты вращения, которое, вследствие наличия главной обратной связи приводит к соответствующему изменению отклонения. Это изменение отклонения усиливается и тем самым изменяет величину напряжения на якоре так, что отклонение частоты, вызванное изменением возмущения, компенсируется. Таким образом, осуществляется стабилизация частоты вращения вала двигателя.
Итак, САР «ДПТ» обеспечивает как стабилизацию, так и слежение.
4.2 Параметры и передаточные функции элементов
Передаточные функции САР «ДПТ» рассчитываются согласно формул (2.1-2.7) и номера варианта задания.
Совокупность передаточных функций элементов и функциональной схемы позволяет построить структурно-алгоритмическую модель САР, а также аналитическую модель, представляющую собой передаточную функцию всей САР.
5. Построение, запуск и анализ модели САР
5.1 Построение структурной схемы САР
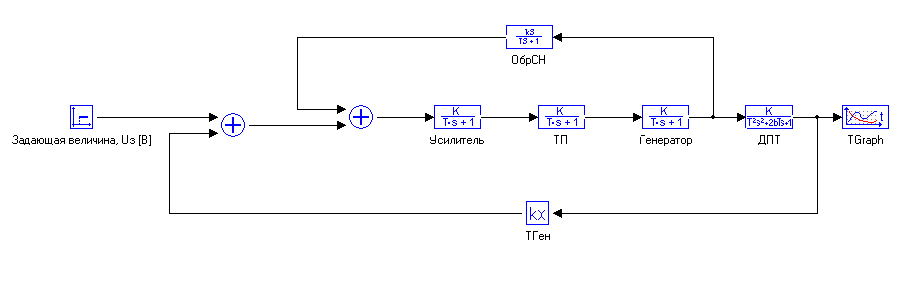
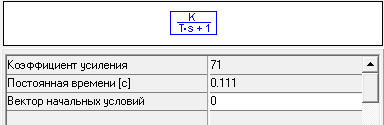
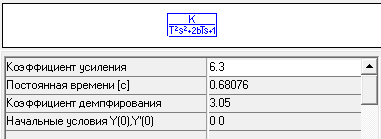
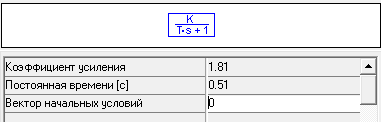
Производим построение в поле программы МВТУ структурную схему САР «ДПТ». Схема и пример введения коэффициентов передаточных функций представлены на рис. 5.1.1.
У
 силитель. Двигатель постоянного тока.
силитель. Двигатель постоянного тока.З
 вено обратной связи (
вено обратной связи ( ОСН). Генератор
ОСН). ГенераторТ
 иристорный преобразователь Тахогенератор
иристорный преобразователь ТахогенераторРис. 5.1.1 Модель исходной САР «ДПТ» .
-
Первый запуск модели
Результаты первого запуска модели САР представлены на рис. 5.2.1.
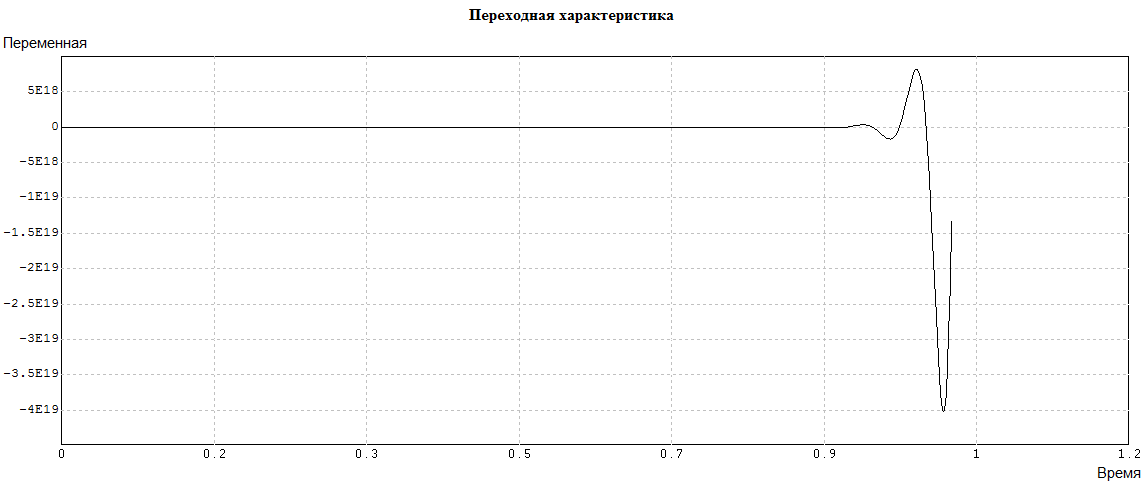
Рис. 5.2.1 Переходная характеристика исходной САР представляет собой колебательный процесс с увеличивающейся со временем амплитудой. Исходная САР неустойчива.)
6. Оценка устойчивости и стабилизация разомкнутой САР.
Параметрическая оптимизация САР
(предварительная коррекция)
6.1 . Стабилизация разомкнутой САР
Разомкнем контур главной обратной связи, подключим его к блоку «Временной график» и запустим моделирование (рис. 6.1.1):
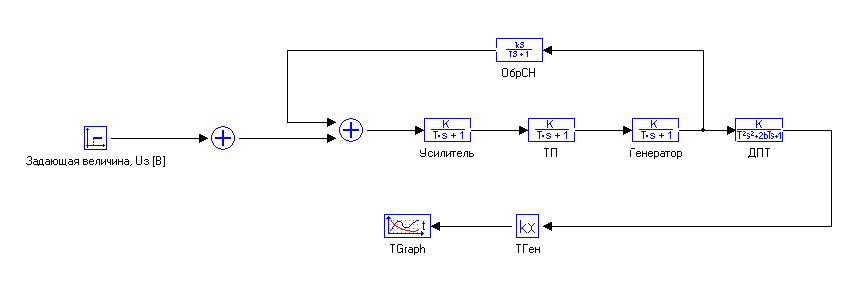
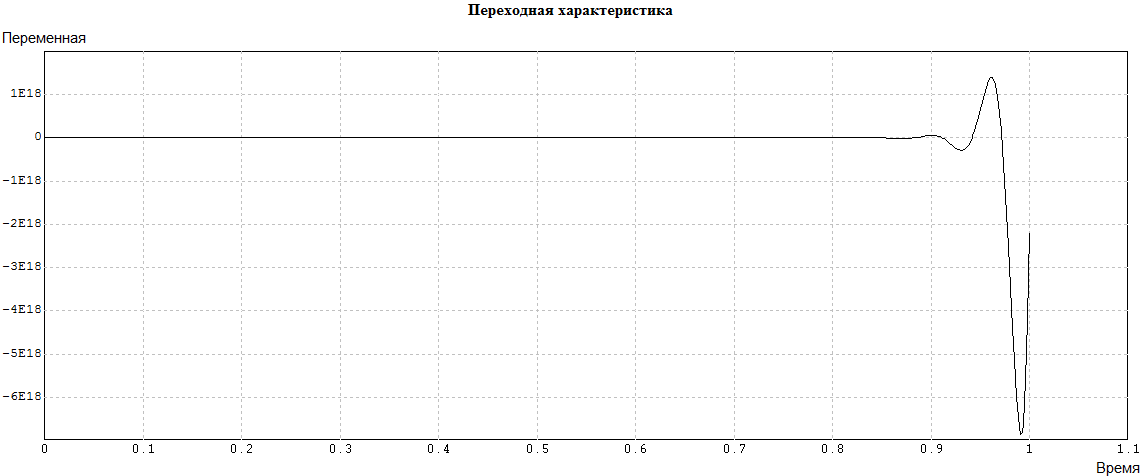
Рис. 6.1.1. Проверка устойчивости разомкнутого контура САР «ДПТ».
График переходной функции показывает (рис. 6.1.1) показывает, что разомкнутая САР неустойчива, поскольку его выходной сигнал представляет собой колебания с быстро увеличивающейся амплитудой. Для обеспечения выполнения необходимого условия практического применения критерия Найквиста, разомкнутую САР требуется стабилизировать.
Нетрудно увидеть, что потеря устойчивости разомкнутой САР возникает из-за наличия местной обратной связи (системы, составленные из устойчивых звеньев и имеющие обратные связи, могут терять устойчивость). Интересно отметить, что эта связь была введена для того, чтобы обеспечить достаточную устойчивость и качество результирующей САР. Это указывает на то, что параметры звена обратной связи по напряжению заданы неудачно и могут потребовать коррекции.
Стабилизация контура уменьшением коэффициента усиления усилителя.Осуществить стабилизацию разомкнутого контура в данном случае можно, меняя параметры двух элементов: усилителя и звена обратной связи по напряжению (ОСН). Для начала попробуем просто уменьшать (увеличивать) коэффициент усиления усилителя до тех пор, пока разомкнутый контур не будет переведен в состояние, близкое к граничному между устойчивым и неустойчивым режимами.
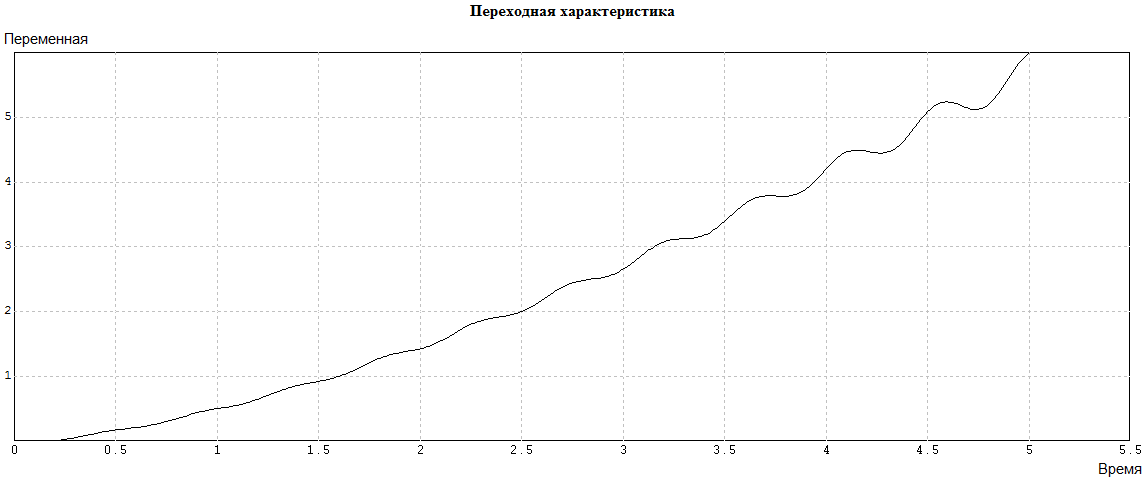
Рис. 6.1.2 Переходная характеристика с коэффициентом усиления усилителя уменьшен с 71 до 0,17.
Переходная характеристика имеет колебательную компоненту, амплитуда которой сравнительно медленно увеличивается со временем. Разомкнутый контур еще не устойчив, но близок к критическому, граничному режиму.
Теперь можно стабилизировать разомкнутую САР, обеспечив хотя бы минимальный, двукратный (т.е. в 6 дБ) запас устойчивости контуру местной обратной связи. Для этого уменьшим коэффициент усиления усилителя вдвое.