Файл: Содержание 3 1 Описание конструкции и работы привода механизма 5.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 05.12.2023
Просмотров: 43
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
СОДЕРЖАНИЕ
1 Описание конструкции и работы привода механизма
2 Кинематический и энергетический расчет приводной станции. Ориентировочный расчет валов
2.2 Расчет параметров на всех валах
3 Расчет зубчатой передачи редуктора
4 Выбор конструкции и определение параметров цилиндрического колеса
5 Конструирование корпуса редуктора. Конструирование валов и подшипниковых узлов
6 Подбор и проверочный расчет подшипников
6.1 Расчет подшипников ведущего вала
6.2 Расчет подшипников ведомого вала
7 Расчет соединений «вал-ступица» с подбором посадок
8 Выбор и проверочный расчет муфты
9 Выбор способа смазки и смазочных материалов передач и подшипников
 Содержание
Содержание
Содержание 3
1 Описание конструкции и работы привода механизма 5
2 Кинематический и энергетический расчет приводной станции. Ориентировочный расчет валов 6
2.1 Выбор электродвигателя 6
2.2 Расчет параметров на всех валах 6
3 Расчет зубчатой передачи редуктора 8
3.1 Выбор материала зубчатых колес 8
3.2 Определение эквивалентного числа циклов перемены напряжений 8
3.3 Определение допускаемых контактных напряжений 8
3.4 Определение допускаемых изгибных напряжений 9
3.5 Расчет геометрических параметров передачи 10
3.6 Силы в зацеплении 11
3.7 Проверочный расчет на выносливость по контактным напряжениям 12
3.8 Проверочный расчет на выносливость по напряжениям изгиба 12
4 Выбор конструкции и определение параметров цилиндрического колеса 14
5 Конструирование корпуса редуктора. Конструирование валов и подшипниковых узлов 15
6 Подбор и проверочный расчет подшипников 17
6.1 Расчет подшипников ведущего вала 17
6.2 Расчет подшипников ведомого вала 17
7 Расчет соединений «вал-ступица» с подбором посадок 18
7.1 Методика расчета 18
7.2 Шпонка под колесом 18
7.3 Шпонка под муфтой 19
7.4 Подбор посадок 19
8 Выбор и проверочный расчет муфты 20
9 Выбор способа смазки и смазочных материалов передач и подшипников 21
Заключение 22
Список использованных источников 23
Приложение 24
Редуктором называется механизм, состоящий из зубчатых или червячных передач, выполненный в виде отдельного органа и служащий для передачи вращения от вала двигателя к валу рабочей машины.
Назначение редуктора - понижение угловой скорости и повышение вращающего момента ведомого вала по сравнению с ведущим.
Применение редукторов обусловлено экономическими соображениями. Масса и стоимость двигателя при одинаковой мощности понижаются с увеличением его быстроходности.
Редуктор состоит из корпуса, в котором размещают элементы передачи - зубчатые колеса, валы, подшипники и т.д.
Редукторы классифицируют по следующим основным признакам: типу передачи (зубчатые, червячные или зубчато-червячные); числу ступеней (одноступенчатые, двухступенчатые и т.д.); типу зубчатых колес (цилиндрические, конические и т.д.); относительному расположению валов в пространстве (горизонтальные, вертикальные); особенностям кинематической схемы (развернутая, соосная, с раздвоенной ступенью и т.д.). В данном проекте разрабатывается одноступенчатый зубчатый цилиндрический редуктор.
Зубчатые передачи являются основными видом передач в машиностроении. Их основные преимущества: высокая нагрузочная способность, и, как следствие, малые габариты; большая долговечность и надежность работы; высокий КПД; постоянство передаточного отношения; возможность применения в широком диапазоне мощностей, скоростей, передаточных отношений. Недостатки: шум при работе, невозможность бесступенчатого изменения передаточного числа, незащищенность при перегрузках, возможность возникновения значительных динамических нагрузок из-за вибрации.
Подшипники служат опорами для валов. Они воспринимают радиальные и осевые нагрузки, приложенные к валу, и сохраняют заданное положение оси вращения вала. В данном приводе используются шариковые радиальные подшипники, которые воспринимают радиальную нагрузку в зубчатой цилиндрической передаче.
1 Описание конструкции и работы привода механизма
Горизонтальный ленточный транспортер – один из самых распространенных типов конвейеров. Предназначен для перемещения в горизонтальной плоскости и прямом направлении различных грузов и продуктов, от сыпучих и не сформированных до штучных и крупнокусковых. Горизонтальный ленточный транспортер позвляет автоматизировать и ускорить производственные процессы предприятия, снизить затраты на ручной труд, повысить производительность.
Рама и несущие конструкции оборудования могут быть выполнены из нержавеющей стали, углеродистой стали окрашенной оплавляемой порошковой эмалью и углеродистой стали покрытой горячим цинкованием.
Конвейеры изготавливаются с применением полимернотканевых, резинотканевых, бескордовых, тканных, тефлоновых и других лент с различными аксессуарами и приспособлениями.
Управление конвейером может быть осуществлено при помощи стандартного пускателя в корпусе, шкафа управления для регулировки скорости, а также интегрировано в общую систему управления производственной линией.
Приводная станция к горизонтальному ленточному транспортеру предназначена для увеличения крутящего момента на приводном валу.
2 Кинематический и энергетический расчет приводной станции. Ориентировочный расчет валов
2.1 Выбор электродвигателя
Исходные данные:
Мощность, передаваемая ведомым валом редуктора:
N2 = 6,0 кВт. Частота вращения ведомого вала редуктора n2 = 253 мин-1. Передаточное число u=1,4. Режим нагрузки: легкий. Срок службы приводной станции, Lh=10*103 часов.
Определяем предварительное значение КПД привода [5, c.12]:
 , (2.1)
, (2.1)где
 - КПД зубчатой цилиндрической закрытой передачи,
- КПД зубчатой цилиндрической закрытой передачи, - КПД пары подшипников качения,
- КПД пары подшипников качения, .
.Определяем требуемую мощность на ведущем валу привода Р':
 , (2.2)
, (2.2)где РТ — мощность, передаваемая ведомым валом редуктора;
ηобщ — общий КПД привода
 .
.Требуемая частота вращения электродвигателя
 (2.3)
(2.3)При заданном режиме нагрузки механизма принимается электродвигатель серии A4 типа 4А112M2У3 с номинальной мощностью PЭД = 7,5 кВт, асинхронной частотой вращения вала nЭД = 500 мин-1, диаметр вала электродвигателя dв = 32 мм.
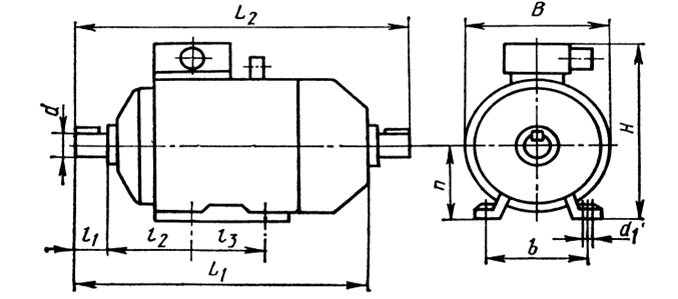
Рисунок 2.2 – Электродвигатель асинхронный
2.2 Расчет параметров на всех валах
Мощности на валах привода:


Частоты вращения валов:

Крутящие моменты на валах привода


Угловые скорости на валах

Предварительно определяются диаметры валов привода из условия прочности на кручение при пониженных допускаемых напряжениях

 .
.Таблица 2.2 – Результаты кинематического расчета
| № вала | Р, кВт | n, мин-1 | Т, Нм | ω, с-1 |
| 1 | 7,5 | 500 | 143,25 | 52,33 |
| 2 | 7,2 | 357,14 | 192,53 | 37,38 |
3 Расчет зубчатой передачи редуктора
Исходные данные:
- мощность на колесе Р2=7,2 кВт,
- крутящий момент на ведущем валу Т1=143,25 Нм,
- крутящий момент на ведомом валу Т2=192,53 Нм,
- частоты вращения валов n1=500 мин-1, n2=357,14 мин-1,
- передаточное число u=1,4,
3.1 Выбор материала зубчатых колес
С целью понижения габаритов передачи, получения высокой изгибной и контактной выносливости зубьев выбираем для шестерни и колеса материал сталь 40Х. Механические характеристики сердцевины – σВ=850МПа, σТ=550МПа [3, табл.8.8]. Термообработка шестерни – закалка ТВЧ до твердости 50 HRC, термообработка колеса – закалка ТВЧ до твердости 46 HRC.
3.2 Определение эквивалентного числа циклов перемены напряжений
Срок службы передачи:


Эквивалентное число циклов перемены напряжений при расчете на контактную прочность:
 (3.1)
(3.1)где с=1 – число колес, находящихся в зацеплении с рассчитываемым,
 , частоты вращения шестерни и колеса,
, частоты вращения шестерни и колеса,- для шестерни:
 циклов
циклов-для колеса:
 .
.3.3 Определение допускаемых контактных напряжений
 . (3.2)
. (3.2)Предел контактной выносливости:
 [3];
[3]; ,
, .
.SH=1,2 – коэффициент безопасности [3, табл. 8.9].
Коэффициент долговечности:
 . (3.3)
. (3.3)Базовое число циклов NHO:
 [3],
[3], [3].
[3].m– показатель степени.
Т.к.
 то m1=20,
то m1=20, m2=6.
m2=6.Тогда:
Таким образом, допускаемые контактные напряжения для шестерни и колеса:
 ;
; .
.Расчетные допускаемые контактные напряжения:
 .
.3.4 Определение допускаемых изгибных напряжений
 . (3.4)
. (3.4)Предел изгибной выносливости
 [1].
[1]. [1].
[1].SF=1,75 – коэффициент безопасности [3].
Коэффициент долговечности:
 , (3.5)
, (3.5)q=9 – показатель степени при твердости шестерни и колеса больше 350НВ,
 - базовое число циклов для всех сталей:
- базовое число циклов для всех сталей:
Принимаем YN=1.
 - коэффициент, учитывающий реверсивность нагрузки.
- коэффициент, учитывающий реверсивность нагрузки.Для нереверсивной нагрузки

