Файл: Контур регулирования уровня металла в промежуточном ковше мнлз.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 11.01.2024
Просмотров: 193
Скачиваний: 1
СОДЕРЖАНИЕ
1.1 Характеристика технологического процесса промежуточного ковша и кристаллизатора МНЛЗ
1.2 Автоматизация процесса. Задачи управления
1.3 Локальная САР уровня металла в промежуточном ковше МНЛЗ
2.1 Расчет статической характеристики объекта управления методом наименьших квадратов
2.2 Расчет динамических параметров по экспериментальной кривой разгона объекта
3 СТРУКТУРНАЯ СХЕМА САУ РЕГУЛИРОВАНИЯ УРОВНЯ ЖИДКОГО МЕТАЛЛА В ПРОМЕЖУТОЧНОМ КОВШЕ
3.1 Расчет настроек контура управления.
3.2 Расчет траектории переходного процесса
4 РАСЧЕТ ПЕРЕХОДНОГО ПРОЦЕССА В КОНТУРЕ УПРАВЛЕНИЯ
5.1 Влияние время интегрирования на качество переходного процесса
5.2 Влияние коэффициента передачи на качество переходного процесса
2.1 Расчет статической характеристики объекта управления методом наименьших квадратов
Для предварительного теоретического исследования функционирования системы автоматического управления необходимо иметь математическое описание статической характеристики оптимизируемого реального процесса. Исходной информацией для математического описания статической характеристики автоматизируемого процесса являются полученные экспериментальные данные об установившихся значениях выходного параметра процесса при фиксированных значениях входного параметра[6].
Для математического описания статических характеристик используются полученные с применением методов математической статистики регрессионные уравнения вида Y = f(X), определяющие функциональную связь между выходным Y и входным X параметрами оптимизируемого процесса. Запас функций, которыми можно математически выразить зависимость Y = f(X), разнообразен. Предпочтение обычно отдается многочленам (полиномам) целых положительных степеней вида:
Так как статическая характеристика нелинейна, то для получения уравнения (теоретической линии регрессии) статической характеристики целесообразно использовать полином третьей степени вида:
При определении постоянных коэффициентов a, b, c, d аппроксимирующего полинома используется наиболее универсальный и наиболее часто применяемый в инженерной практике метод наименьших квадратов:
где n – число экспериментальных пар данных,
Коэффициенты полинома определяются из решения системы уравнений
, полученных с использованием метода наименьших квадратов:
 yi = na + b xi + c xi2 + d xi3 + e xi4 ;
yi = na + b xi + c xi2 + d xi3 + e xi4 ;xiyi = a xi + b xi2 + c xi3 + d xi4 + e xi5 ;
xi2yi = a xi2 + b xi3 + c xi4 + d xi5 + e xi6 ;
xi3yi = a xi3 + b xi4 + c xi5 + d xi6 + e xi7 ;
xi4yi = a xi4 + b xi5 + c xi6 + d xi7 + e xi8 ;
Расчет коэффициентов уравнения статической характеристики методом наименьших квадратов приведен в таблице 2.
Таблица 1 - Расчет коэффициентов уравнения статической характеристики

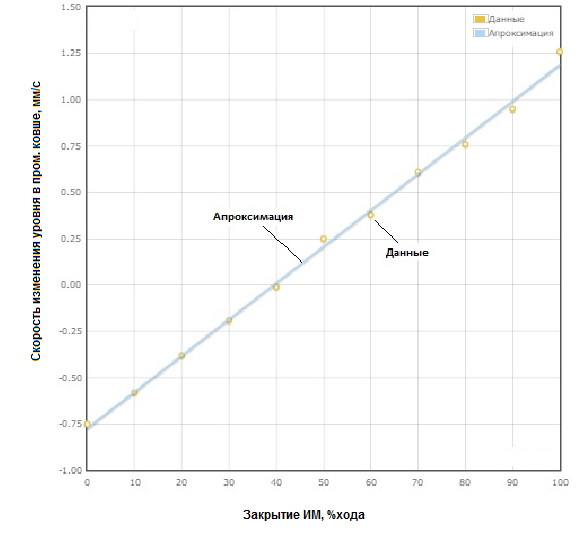
Рисунок 2.1. Апроксимация статической характеристики объекта
Аппроксимирующий полином примет вид:
Y=-0.78*x+0.019
2.2 Расчет динамических параметров по экспериментальной кривой разгона объекта
Наиболее сложными для управления являются объекты астатического типа или объекты без самовыравнивания. Отличительной чертой таких объектов является наличие интегрирующего элемента, определяющего их специфические динамические свойства.
Выходная величина объекта без самовыравнивания после нанесения входного одно- кратного скачкообразного возмущения неограниченно изменяется с постоянной скоростью, пропорциональной величине входного возмущающего воздействия.
Увеличение объема металла поступающего в промежуточный ковш

Где
 – плотность жидкого металла =7860 кг/
– плотность жидкого металла =7860 кг/

Где m – масса жидкого металла при заданном уровне металла (700 мм),
 – время наполнения промковша при 100% открытом ИМ
– время наполнения промковша при 100% открытом ИМ
Внутреннее сечение промежуточного ковша Sи скорость изменения уровня жидкого металла в промковше


Расчет траектории изменения информационного сигнала вторичного прибора производится с помощью численного метода Эйлера по формулам:

Результаты расчета представлены в таблице 3. По методу Элера определяются координаты других точек траектории Z(t). Расчет необходимо производить до достижения постоянной скорости приращения ΔZ, что было достигнуто 50 м шаге расчета ΔZ(t=50)=4.87, что практически совпадает со скоростью изменения уровня в промковше L*=4,9.
Таблица 2 - Расчет траектории выходного информационного сигнала
| t | Y(t) | Z(t) | delZ(t) |
| 1 | 4,9 | 0 | 0,49 |
| 2 | 9,8 | 0,49 | 0,931 |
| 3 | 14,7 | 1,421 | 1,3279 |
| 4 | 19,6 | 2,7489 | 1,68511 |
| 5 | 24,5 | 4,43401 | 2,006599 |
| 6 | 29,4 | 6,440609 | 2,295939 |
| 7 | 34,3 | 8,736548 | 2,556345 |
| 8 | 39,2 | 11,29289 | 2,790711 |
| 9 | 44,1 | 14,0836 | 3,00164 |
| 10 | 49 | 17,08524 | 3,191476 |
| 11 | 53,9 | 20,27672 | 3,362328 |
| 12 | 58,8 | 23,63905 | 3,516095 |
| 13 | 63,7 | 27,15514 | 3,654486 |
| 14 | 68,6 | 30,80963 | 3,779037 |
| 15 | 73,5 | 34,58867 | 3,891133 |
| 16 | 78,4 | 38,4798 | 3,99202 |
| 17 | 83,3 | 42,47182 | 4,082818 |
| 18 | 88,2 | 46,55464 | 4,164536 |
| 19 | 93,1 | 50,71917 | 4,238083 |
| 20 | 98 | 54,95726 | 4,304274 |
| 21 | 102,9 | 59,26153 | 4,363847 |
| 22 | 107,8 | 63,62538 | 4,417462 |
| 23 | 112,7 | 68,04284 | 4,465716 |
| 24 | 117,6 | 72,50856 | 4,509144 |
| 25 | 122,5 | 77,0177 | 4,54823 |
| 26 | 127,4 | 81,56593 | 4,583407 |
| 27 | 132,3 | 86,14934 | 4,615066 |
| 28 | 137,2 | 90,7644 | 4,64356 |
| 29 | 142,1 | 95,40796 | 4,669204 |
| 30 | 147 | 100,0772 | 4,692283 |
| 31 | 151,9 | 104,7695 | 4,713055 |
| 32 | 156,8 | 109,4825 | 4,731749 |
| 33 | 161,7 | 114,2143 | 4,748575 |
| 34 | 166,6 | 118,9628 | 4,763717 |
| 35 | 171,5 | 123,7265 | 4,777345 |
| 36 | 176,4 | 128,5039 | 4,789611 |
| 37 | 181,3 | 133,2935 | 4,80065 |
| 38 | 186,2 | 138,0942 | 4,810585 |
| 39 | 191,1 | 142,9047 | 4,819526 |
| 40 | 196 | 147,7243 | 4,827574 |
| 41 | 200,9 | 152,5518 | 4,834816 |
| 42 | 205,8 | 157,3867 | 4,841335 |
| 43 | 210,7 | 162,228 | 4,847201 |
| 44 | 215,6 | 167,0752 | 4,852481 |
| 45 | 220,5 | 171,9277 | 4,857233 |
| 46 | 225,4 | 176,7849 | 4,86151 |
| 47 | 230,3 | 181,6464 | 4,865359 |
| 48 | 235,2 | 186,5118 | 4,868823 |
| 49 | 240,1 | 191,3806 | 4,871941 |
| 50 | 245 | 196,2525 | 4,874747 |
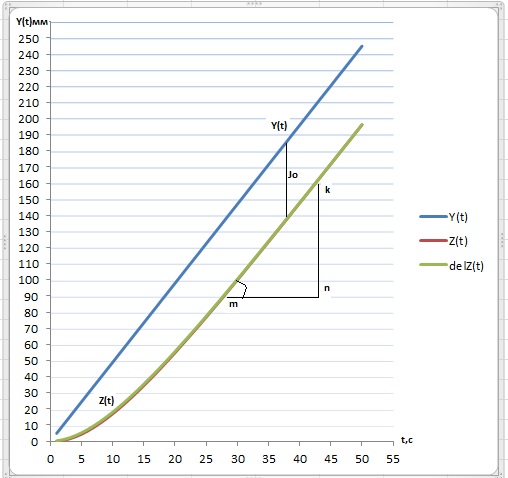
Рисунок 2.1 - Расчетные траектории изменения уровня металла
Полученная расчетная траектория является искомой траекторией кривой разгона астатического объекта второго порядка.
По графику рис. определяются:
величина интеграла
 =2.22 мм – динамическая ошибка измерительного канала;
=2.22 мм – динамическая ошибка измерительного канала; тангенс угла tgα = KN/MN = 1,206 и угол α=50.33°
Определим коэффициенты дифференциального уравнения астатического объекта

Составим уравнение динамики ОУ

Точное решение уравнение имеет вид
3 СТРУКТУРНАЯ СХЕМА САУ РЕГУЛИРОВАНИЯ УРОВНЯ ЖИДКОГО МЕТАЛЛА В ПРОМЕЖУТОЧНОМ КОВШЕ
Любой контур управления в обязательном порядке содержит объект управления, регулятор и механизм воздействия на управляемый объект. Заданием на курсовой проект был определен объект управления – интегральное звено и инерционное звено первого порядка.
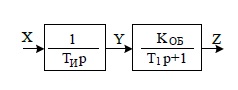
Рисунок 3.1 - Объект управления
Передаточная функция такого объекта описывается уравнением вида
 ,
,То – постоянная времени объекта, с;
τ – время запаздывания, c;
В качестве регулятора для данного типа объекта выбираем пропорционально-интегральный регулятор (ПИ-регулятор), передаточная функция которого описывается уравнением вида:
где kр – коэффициент передачи регулятора;
Тиз – время изодрома.
Заданием определен исполнительный механизм постоянной скорости типа МЭО 100/63-0,25, описываемый передаточной функцией вида:
 где Тим – время полного хода, или время перекладки исполнительного механизма от одного концевого выключателя до другого. Тим является настроечным параметром контура управления
где Тим – время полного хода, или время перекладки исполнительного механизма от одного концевого выключателя до другого. Тим является настроечным параметром контура управления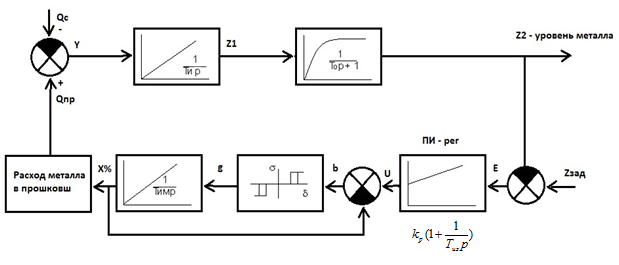
Рисунок 3.2 - Структурная схема контура управления.
Объект управления, представляющий из себяинтегрирующее звено, инерционное звено первого порядка с запаздыванием, представлен в. Первое звено с постоянной времени, равной постоянной времени объекта, второе звено – с постоянной времени, равной времени запаздывания (в первом приближении звено запаздывания можно заменить инерционным звеном первого порядка).