Файл: Контур регулирования уровня металла в промежуточном ковше мнлз.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 11.01.2024
Просмотров: 187
Скачиваний: 1
СОДЕРЖАНИЕ
1.1 Характеристика технологического процесса промежуточного ковша и кристаллизатора МНЛЗ
1.2 Автоматизация процесса. Задачи управления
1.3 Локальная САР уровня металла в промежуточном ковше МНЛЗ
2.1 Расчет статической характеристики объекта управления методом наименьших квадратов
2.2 Расчет динамических параметров по экспериментальной кривой разгона объекта
3 СТРУКТУРНАЯ СХЕМА САУ РЕГУЛИРОВАНИЯ УРОВНЯ ЖИДКОГО МЕТАЛЛА В ПРОМЕЖУТОЧНОМ КОВШЕ
3.1 Расчет настроек контура управления.
3.2 Расчет траектории переходного процесса
4 РАСЧЕТ ПЕРЕХОДНОГО ПРОЦЕССА В КОНТУРЕ УПРАВЛЕНИЯ
5.1 Влияние время интегрирования на качество переходного процесса
5.2 Влияние коэффициента передачи на качество переходного процесса
Z2=Z2пр+∆Z2/∆τ=-7,31+(-2,05)=-9,36;
∆Z1/∆τ=(Y-Z1)/To=(-43,94-(-21,96;))/10=-2,1;
∆Z2/∆τ=(Z1-Z2)/τз=(-21,96-(-9,36))/6=-2,1;
Е=Zзад-Z2=100-9,36=90,64мм;
F=Fн+∆τE=45,32;
U=kр(E+F/Tи)=6,25(90,64+45,32/40)=630,19;
Если U<-1,то σ=-1, если U>+1, тоσ=+1, в противном случае σ=0.
σ(τ=0)=+1
t=4,5:
X=Xн+σkимτ=50+4,51,59 =57,15%хода ИМ;
Y=-0,78*57,15 +0,019= -44,56;
Z1=Z1пр+∆Z1/∆τ=-21,96+(-2,1;)=-24,06;
Z2=Z2пр+∆Z2/∆τ=-9,36+(-2,1)=-11,46;
∆Z1/∆τ=(Y-Z1)/To=(-44,56-(-24,06;))/10=-2,05;
∆Z2/∆τ=(Z1-Z2)/τз=(-24,06-(-11,46))/6=-2,1;
Е=Zзад-Z2=100-11,46=88,54мм;
F=Fн+∆τE=44,27;
U=kр(E+F/Tи)=6,25(88,54+44,27/40)=624,6
Если U<-1,то σ=-1, если U>+1, тоσ=+1, в противном случае σ=0.
σ(τ=0)=+1
5 ИССЛЕДОВАНИЕ ВЛИЯНИЯ ДИНАМИЧЕСКИХ ПАРАМЕТРОВ НАСТРОЙКИ КОНТУРА НА ПОКАЗАТЕЛИ КАЧЕСТВА ПЕРЕХОДНЫХ ПРОЦЕССОВ
В реальном контуре управления вид переходного процесса искажается вследствие влияния на него таких показателей, как скорость исполнительного механизма, зона нечувствительности. Таким образом, рассчитав предварительно уставки регулятора по любому методу, в частности по методу “СО”, необходимо в дальнейшем экспериментально подбирать настройки, являющиеся оптимальными в каждом конкретном случае.
В качестве настроечных параметров выступают:
-
время интегрирования регулятора ;
; -
коэффициент передачи регулятора ;
;
5.1 Влияние время интегрирования на качество переходного процесса
При увеличении Ти величина интегральной составляющей в ПИ-законе регулирования уменьшается. Это может привести к улучшению показателей качества переходного процесса.
Исходными значениями динамических параметров настройки ПИ-регулятора приняты значения Кр опт и Ти опт, определенные по методу “СО”:
Кропт =6.25 %хода ИМ/м, Тизопт=40с
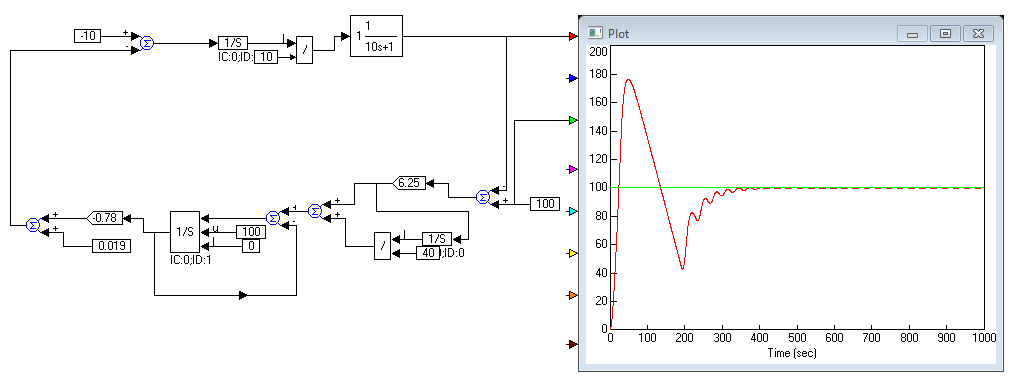
Рисунок 5.1 - Переходный процесс при Kр=6.25 и Тиз=40
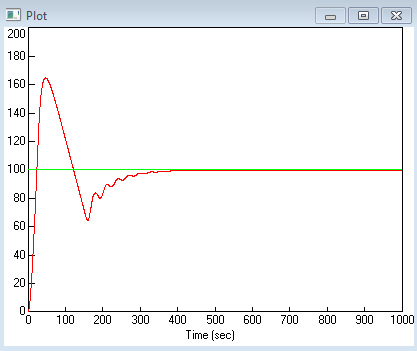
Рисунок 5.2 - Переходный процесс при Kр=6,25 и Тиз=60
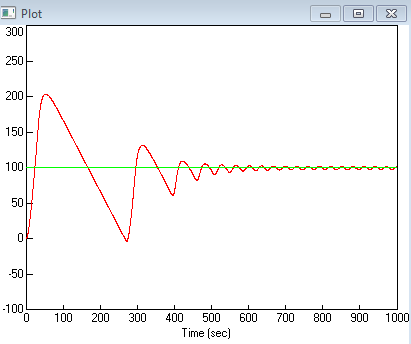
Рисунок 5.3 - Переходный процесс при Kр=6,25 и Тиз=20
Видно, что увеличение Ти улучшило показатели качества переходного процесса
Вывод: Увеличение величины Ти до значения 60с. приводит к сокращению продолжительности переходного процесса и уменьшению величины перерегулирования, поэтому целесообразно для обеспечения лучшего качества регулирования принять значение Ти=60с. Дальнейшее увеличение Ти приводит к апериодическому переходному процессу и понижению быстродействия, и поэтому нецелесообразно.
5.2 Влияние коэффициента передачи на качество переходного процесса
Следующим параметром настройки является коэффициент передачи регулятора Кр. Исследуем влияние величины Кр на показатели качества.
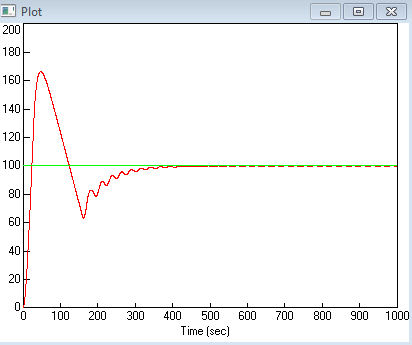
Рисунок 5.4 - Переходный процесс при Kр=0.825 и Тиз=60
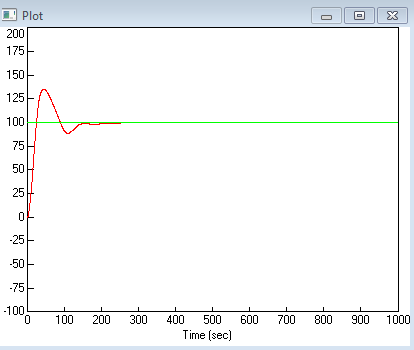
Рисунок 5.5 - Переходный процесс при Kр=1.25 и Тиз=60
Анализ этих значений показателей качества, а также переходных процессов представленных на рисунках 5.4 и 5.5 позволяет сделать вывод о нецелесообразности увеличения значения Кр по сравнению с его увеличением. Это обусловлено тем, что процесс становится апериодическим и характеризуется значительным понижением быстродействия контура, что недопустимо для автоматизируемого технологического процесса.
ЗАКЛЮЧЕНИЕ
В курсовом проекте в общей части были рассмотрены характеристики технологического процесса регулирования уровня металла в промежуточном ковше МНЛЗ. Рассмотрено назначение промежуточного ковша и кристаллизатора МНЛЗ.
Представлен процесс, как объект управления. Сформулированы основные задачи управления, указаны, технологические параметры контроля и регулирования в системе.
Рассмотрена локальная САР системы регулирования уровня металла в промежуточном ковше МНЛЗ, указано основное назначение САР, описано прохождение сигналов от датчика до исполнительного механизма с указанием типов приборов и видов сигналов.
В специальной части был приведен расчет статической характеристики методом наименьших квадратов, для математического описания статической характеристики оптимизируемого процесса. Под математическим описанием понимается уравнение статической характеристики, полученной экспериментальным путем. Под оптимизацией понимается нахождение параметров системы, которые являются наилучшими для ее функционирования. В результате расчетов получено уравнение второй степени и построена статическая характеристика.
Рассмотрена динамическая характеристика объекта управления, определены параметры объекта и составлено уравнение динамики и передаточной функции ОУ.
Разработана структурная схема САУ технологического параметра с указанием технических средств, применяемых на производстве.
В результате проделанных расчетов и соответствующего им анализа, контуру управления технологическим параметром – уровнем металла в промежуточном ковше – были подобраны значения настроечных параметров обеспечивающих переходный процесс с показателями качества:
Kр=1,25
Тиз=60
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
-
http://wwwcdl.bmstu.ru/mt10/UTS/source/automated_control_of_rolling.pdf -
https://studfiles.net/preview/1744708/ -
http://electricalschool.info/spravochnik/apparaty/1888-termometry-soprotivlenija-princip.html -
Ившин, В.П. Современная автоматика в системах управления технологическими процессами [Текст]: учебное пособие / В.П. Ившин, М.Ю. Перухин. – М.: «НИЦ Инфра-М», 2018. – 400 с. -
Рогов, В.А. Технические средства автоматизации и управления [Текст]: учебник / В.А. Рогов, А.Д. Чудаков. М.: «Юрайт», 2017. – 406 с. -
Салганик, В.М. Основы автоматизации технологических процессов [Текст]: учебное пособие / В.М. Салганик, Г.В. Щуров, П.П. Полецков, Д.Н. Чикишев, Д.Ю. Алексеев. – Магнитогорск: «МГТУ», 2014. – 82 с. -
Шишмарёв, В.Ю. Автоматизация технологических процессов [Текст]: учебное пособие/ В. Ю. Шишмарёв. – Санкт-Петербург: «Academia», 2017. — 352 с. -
Иванов, А.А. Автоматизация технологических процессов и производств [Текст]: учебное пособие / А.А. Иванов. – М.: «Форум», 2017. — 224 с. -
Андреев, С.М. Разработка и моделирование несложных систем автоматизации с учетом специфики технологических процессов [Текст]: учебное пособие / С.М. Андреев, Б.Н. Парсункин. – М.: «Академия», 2016. – 286 с. -
Матвейчук, Н.М. Теория автоматического управления [Текст]: учебно-методическое пособие / Н.М. Матвейчук, А.Г. Сеньков. – Минск: «БГАТУ», 2018. – 100 с. -
Ротач, В.Я. Автоматизация настройки систем управления [Текст]: учебное пособие / В.Я. Ротач, В.Ф. Кузищин, А.С. Клюев. – М.: Альянс, 2015. – 272 с. -
Коновалов, Б.И. Теория автоматического управления [Текст]: учебно-методическое пособие / Б.И. Коновалов, Ю.М. Лебедев. – СПб.: «Лань», 2016. – 224 с. -
Клюев, А.С. Автоматизация настройки систем управления [Текст]: учебное пособие / А.С. Клюев, В.Я. Ротач, В.Ф. Кузищин. – М.: «Альянс», 2015. — 272 c. -
Цветкова, О.Л. Теория автоматического управления [Текст]: учебник / О.Л. Цветкова. - Москва: «Директ-Медиа», 2016. - 207 с.