Файл: Г.М. Гринфельд лекции по курсу дискретные системы автоматического управления.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 29.07.2024
Просмотров: 369
Скачиваний: 0
СОДЕРЖАНИЕ
1.1 Типы квантования непрерывных сигналов.
1.2. Решетчатые функции разностные уравнения.
1.3. Обобщенная структурная схема дискретной системы.
1.4. Простейший импульсный элемент. Формирующий элемент. Фиксатор.
2. Основы теории z-преобразования
2.1. Дискретное преобразование Лапласа. Z-преобразование.
2.2. Основные теоремы z-преобразования.
2.3. Передаточная функция разомкнутой дискретной системы.
2.4. Последовательное соединение звеньев в дискретных сау.
2.5. Передаточная функция замкнутой дискретной системы.
2.6. Обратное z-преобразование.
3. Анализ устойчивости и точности
3.1 Прямой метод оценки устойчивости.
3.2 Критерий устойчивости Шур-Кона.
3.3 Критерий устойчивости, использующий билинейное преобразование.
3.4. Абсолютно устойчивые системы.
3.5. Анализ точности дискретных систем.
4. Частотные характеристики дискретных систем
4.1. Теорема Котельникова-Шеннона.
4.2. Логарифмические частотные характеристики дискретных сау.
5. Определение реакции дискретной сау
5.1. Метод дробного квантования.
5.2. Метод модифицированного z-преобразования.
6. Системы автоматического управления
6.2. Передаточные функции цву, реализующего типовые законы управления.
7. Коррекция цифровых систем управления
7.1. Коррекция дискретных сау с помощью непрерывных регуляторов.
7.2. Коррекция сау с помощью цифровых регуляторов.
7.3. Физическая реализуемость цифровых регуляторов.
7.4. Реализация цифровых регуляторов импульсными фильтрами.
7.5. Реализация цифровых регуляторов на базе цву.
8. Методические указания и вариаты расчетно-графического задания
Г.М. Гринфельд
Лекции по курсу
“ДИСКРЕТНЫЕ СИСТЕМЫ
АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ”
Комсомольск-на-Амуре 2003
1. Общие сведения
1.1 Типы квантования непрерывных сигналов.
Наряду с непрерывными системами автоматического управления (САУ) широкое применение находят системы, в которых имеет место дискретный способ передачи и преобразования дискретных сигналов. Процесс преобразования непрерывных сигналов в дискретные называется квантованием. Дискретность сигналов может быть обусловлена их квантованием по времени, по уровню или одновременно по уровню и по времени. По этому признаку дискретные системы подразделяются на три вида.
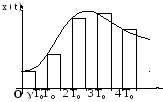
1. В
импульсных системахв результатеквантования по временинепрерывного
сигнала![]() формируется последовательность его
дискретных значений (дискрет),
соответствующих фиксированным моментам
времени. Обычно эти моменты отстоят
друг от друга на постоянную величину
формируется последовательность его
дискретных значений (дискрет),
соответствующих фиксированным моментам
времени. Обычно эти моменты отстоят
друг от друга на постоянную величину![]() ,
называемуюинтервалом квантования
по времени(рис. 1). При этом сформированную
последовательность дискрет принято
называтьрешетчатой функцией
,
называемуюинтервалом квантования
по времени(рис. 1). При этом сформированную
последовательность дискрет принято
называтьрешетчатой функцией![]() целочисленного аргумента. Очевидно,
что различным непрерывным сигналам
может соответствовать одна и та же
решетчатая функция (рис. 2). В тоже время
при заданном интервале квантования
целочисленного аргумента. Очевидно,
что различным непрерывным сигналам
может соответствовать одна и та же
решетчатая функция (рис. 2). В тоже время
при заданном интервале квантования![]() каждой функции
каждой функции![]() соответствует единственная решетчатая
функция. В общем случае квантование
сигнала по времени сопровождается
потерей информации, так как решетчатая
функция
соответствует единственная решетчатая
функция. В общем случае квантование
сигнала по времени сопровождается
потерей информации, так как решетчатая
функция![]() не передает характер изменения
непрерывного сигнала между моментами
квантования.
не передает характер изменения
непрерывного сигнала между моментами
квантования.
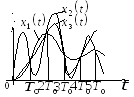
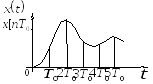
Рис.1. Квантование непрерывного сигнала Рис.2. К определению решетчатой
в импульсной системе функции
2. В отличие
от квантования по времени, квантование
по уровнюможет происходить в
произвольные моменты времени, которым
соответствует достижение непрерывного
сигнала![]() заранее фиксированного уровня (рис. 3).
Системы с таким типом квантования
называютсярелейными.
заранее фиксированного уровня (рис. 3).
Системы с таким типом квантования
называютсярелейными.
3. Система, в которой имеет место квантование по уровню, и по времени, относятся к цифровым САУ (рис. 4).
Если
величина интервала квантования много
меньше диапазона изменения сигнала
![]() ,
дискретностью по уровню можно пренебречь
и тем самым свести цифровую систему к
импульсной. Допустимость такой замены
позволяет существенно упростить
математическое описание дискретных
систем. В дальнейшем под дискретными
САУ в данном курсе подразумеваются
только импульсные системы.
,
дискретностью по уровню можно пренебречь
и тем самым свести цифровую систему к
импульсной. Допустимость такой замены
позволяет существенно упростить
математическое описание дискретных
систем. В дальнейшем под дискретными
САУ в данном курсе подразумеваются
только импульсные системы.
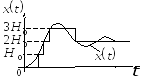
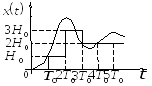
Рис.3. Квантование непрерывного сигнала Рис.4. Квантование непрерывного сигнала
в релейной системе по времени
(![]() - интервал квантования по уровню)
- интервал квантования по уровню)
1.2. Решетчатые функции разностные уравнения.
Очевидно,
что для получения математического
выражения, описывающего решетчатую
функцию
![]() ,
необходимо в выражении для
,
необходимо в выражении для![]() выполнить формальную замену непрерывного
аргументаtна
выполнить формальную замену непрерывного
аргументаtна![]() .
Например, непрерывной функции
.
Например, непрерывной функции
![]()
будет соответствовать решетчатая функция
![]() .
.
Для решетчатой функции определены ее разности. Первая обратная разность равна
![]() ,
,
а первая прямая разностьопределяется выражением вида
![]() .
.
Введем в рассмотрение прямую и обратную разности k-го порядка, которые определяются через разности (k-1)-го порядка по формулам:
![]() ;
;
![]()
соответственно.
При управлении системой в реальном
масштабе времени величина дискреты
![]() не может быть определена в текущий
момент времени
не может быть определена в текущий
момент времени![]() ,
поэтому технически реализуется только
обратная разность. Разности решетчатых
функций являются аналогами производных
для непрерывных функций времени.
,
поэтому технически реализуется только
обратная разность. Разности решетчатых
функций являются аналогами производных
для непрерывных функций времени.
Операцией, обратной операции взятия разности, является суммирование решетчатой функции, в результате которого получаем новую решетчатую функцию:
![]() .
.
Уравнение вида
![]() ,
,
в левой части которого записана комбинация решетчатых функций и ее разностей, называется разностным уравнением. Поскольку разность любого порядка может быть выражена в виде линейной комбинации значений решетчатой функции в различные моменты времени, для записи разностного уравнения используется следующая форма:
![]() (1)
(1)
Любое разностное уравнение может быть разрешено относительно значения решетчатой функции от наибольшего аргумента
![]() (2)
(2)
Очевидно, что
(2) определяет рекуррентную процедуру
численного решения разностного уравнения
при известных начальных условиях
![]() .
.
Если комбинация решетчатых функций в (1) является линейной, то динамика дискретной системы описывается линейным разностным уравнением k-го порядка:
![]() ,
(3)
,
(3)
в котором
![]() -
постоянные числа, если система стационарна,
а
-
постоянные числа, если система стационарна,
а
![]() -
известная решетчатая функция, описывающая
входное воздействие. Общее решение
уравнения (3) представляет собой сумму
общего решения однородного уравнения
-
известная решетчатая функция, описывающая
входное воздействие. Общее решение
уравнения (3) представляет собой сумму
общего решения однородного уравнения
![]() ,
полученного из (3) при
,
полученного из (3) при
![]() ,
и частного уравнения
,
и частного уравнения
![]() ,
определяемого функцией
,
определяемого функцией
![]() :
:
![]() .
(4)
.
(4)
Первое слагаемое в (4), описывающее свободную составляющую движения системы, может быть представлено в виде:
![]() ,
,
где
![]() -
простые корни характеристического
уравнения:
-
простые корни характеристического
уравнения:
![]() ,
,
а
![]() -
коэффициенты, зависящие от начальных
условий.
-
коэффициенты, зависящие от начальных
условий.
1.3. Обобщенная структурная схема дискретной системы.
Определяющим
признаком, отличающим непрерывную
систему от дискретной (рис. 5), является
наличие в последней импульсного
элемента (ИЭ), который выполняет
следующие две операции: во-первых,
осуществляет квантование по времени
сигнала![]() и, во-вторых, формирует на выходе
последовательность модулированных
импульсов
и, во-вторых, формирует на выходе
последовательность модулированных
импульсов![]() определенной формы.
определенной формы.
При этом
модуляция импульсов этой последовательности
производится в зависимости от величины
дискрет решетчатой функции, сформированной
из
![]() .
Основными параметрами импульсов на
выходе ИЭ является их амплитудаA,
длительность
.
Основными параметрами импульсов на
выходе ИЭ является их амплитудаA,
длительность![]() или скважность
или скважность![]() и частота следования
и частота следования
![]() .
В зависимости от того, какой из параметров
импульсов последовательности варьируется,
различают:амплитудно-импульсную
(АИМ)(рис. 6);широтно-импульсную
(ШИМ)(рис. 7) ичастотно-импульсную
модуляции (ЧИМ) (рис. 8).
.
В зависимости от того, какой из параметров
импульсов последовательности варьируется,
различают:амплитудно-импульсную
(АИМ)(рис. 6);широтно-импульсную
(ШИМ)(рис. 7) ичастотно-импульсную
модуляции (ЧИМ) (рис. 8).
Зависимость
между модулируемым параметром и
величиной дискреты может быть произвольной.
Наиболее простой случай – пропорциональная
зависимость. При этом для АИМ получаем
![]() ,
где
,
где![]() -
коэффициент передачи импульсного
элемента. ИЭ является линейным, если
для него выполняется принцип суперпозиции,
то есть если его реакция на сумму любых
воздействий равна сумме его реакций на
каждое из воздействий.
-
коэффициент передачи импульсного
элемента. ИЭ является линейным, если
для него выполняется принцип суперпозиции,
то есть если его реакция на сумму любых
воздействий равна сумме его реакций на
каждое из воздействий.
Можно
показать, что ИЭ с АИМ при наличие
линейной зависимости амплитуды импульса
от величины дискреты представляет собой
линейное звено, а при осуществлении ШИМ
ИЭ является нелинейным даже в том случае,
когда ширина импульса линейно зависит
от величины модулирующего сигнала.
Далее в настоящем курсе рассматриваются
только импульсные САУ с амплитудно-импульсной
модуляцией, в процессе которой выполняется
условие
![]() .
.