Файл: Г.М. Гринфельд лекции по курсу дискретные системы автоматического управления.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 29.07.2024
Просмотров: 385
Скачиваний: 0
СОДЕРЖАНИЕ
1.1 Типы квантования непрерывных сигналов.
1.2. Решетчатые функции разностные уравнения.
1.3. Обобщенная структурная схема дискретной системы.
1.4. Простейший импульсный элемент. Формирующий элемент. Фиксатор.
2. Основы теории z-преобразования
2.1. Дискретное преобразование Лапласа. Z-преобразование.
2.2. Основные теоремы z-преобразования.
2.3. Передаточная функция разомкнутой дискретной системы.
2.4. Последовательное соединение звеньев в дискретных сау.
2.5. Передаточная функция замкнутой дискретной системы.
2.6. Обратное z-преобразование.
3. Анализ устойчивости и точности
3.1 Прямой метод оценки устойчивости.
3.2 Критерий устойчивости Шур-Кона.
3.3 Критерий устойчивости, использующий билинейное преобразование.
3.4. Абсолютно устойчивые системы.
3.5. Анализ точности дискретных систем.
4. Частотные характеристики дискретных систем
4.1. Теорема Котельникова-Шеннона.
4.2. Логарифмические частотные характеристики дискретных сау.
5. Определение реакции дискретной сау
5.1. Метод дробного квантования.
5.2. Метод модифицированного z-преобразования.
6. Системы автоматического управления
6.2. Передаточные функции цву, реализующего типовые законы управления.
7. Коррекция цифровых систем управления
7.1. Коррекция дискретных сау с помощью непрерывных регуляторов.
7.2. Коррекция сау с помощью цифровых регуляторов.
7.3. Физическая реализуемость цифровых регуляторов.
7.4. Реализация цифровых регуляторов импульсными фильтрами.
7.5. Реализация цифровых регуляторов на базе цву.
8. Методические указания и вариаты расчетно-графического задания
![]() .
.
Функцию веса ПНЧ можно найти, выполнив преобразования Лапласа над передаточной функцией ПНЧ:
![]() .
.
Таким образом,
процедуру определения дискретной
передаточной функции разомкнутой
системы
![]() по
передаточной функции ПНЧ
по
передаточной функции ПНЧ![]() можно условно записать в виде следующего
перехода:
можно условно записать в виде следующего
перехода:
 (19)
(19)
Пример 9.
Необходимо определить
![]() ,
если
,
если![]() .
Для того следует выполнить преобразование
(19), начиная с вычисления непрерывной
функции веса ПНЧ:
.
Для того следует выполнить преобразование
(19), начиная с вычисления непрерывной
функции веса ПНЧ:
![]() .
.
Соответствующая решетчатая функция веса:
 .
.
Взяв
Z-преобразование от
![]() ,
получим:
,
получим:
![]()
 .
.
Пример 10.
Необходимо определить
![]() ,
если передаточная функция НЧ системы
имеет вид:
,
если передаточная функция НЧ системы
имеет вид:
![]() ,
а в качестве ФЭ используется фиксатор
с передаточной функцией (7).
,
а в качестве ФЭ используется фиксатор
с передаточной функцией (7).
Предварительно
решим поставленную задачу в общем виде
для системы с передаточной функцией НЧ
![]() .
Передаточная функция ПНЧ такой системы
согласно (9) равна:
.
Передаточная функция ПНЧ такой системы
согласно (9) равна:
![]() .
.
Следовательно
![]()

В частном случае
для
![]() ,
указанной в условии настоящего примера,
имеем:
,
указанной в условии настоящего примера,
имеем:
![]() .
.
2.4. Последовательное соединение звеньев в дискретных сау.
Дискретная
САУ, структура которой приведена на
рис. 14, а, содержит два непрерывных звена
с передаточными функциями
![]() и
и![]() .
Эти звенья разделены квантователем
.
Эти звенья разделены квантователем![]() ,
который идентичен входному квантователю
,
который идентичен входному квантователю![]() и синхронизирован с ним.
и синхронизирован с ним.
а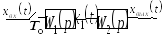 ) б)
) б)
Рис.14. Последовательное соединение звеньев в дискретных САУ
Сигналы на выходе звеньев:
![]() .
.
следовательно:
![]()
и дискретная передаточная функция всей системы в этом случае равна:
![]() .
.
Если звенья
![]() и
и![]() не разделены квантователем (рис.14,б), то
дискретная передаточная функция всей
системы равна:
не разделены квантователем (рис.14,б), то
дискретная передаточная функция всей
системы равна:
![]()
В общем случае
![]() .
.
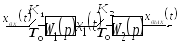
Пример 11. Необходимо записать передаточную функцию разомкнутой дискретной САУ, структура которой приведена на рис.15:

Рис.15. Структура дискретной САУ к примеру 11
При
определении
![]() системы необходимо предварительно
выделить в ней подсистемы последовательно
соединенных звеньев, между которыми
нет квантователя, и найти их передаточные
функции. Затем дискретные передаточные
функции подсистем следует перемножить.
системы необходимо предварительно
выделить в ней подсистемы последовательно
соединенных звеньев, между которыми
нет квантователя, и найти их передаточные
функции. Затем дискретные передаточные
функции подсистем следует перемножить.
Для рассматриваемого примера:
![]() .
.
Пример 12. Вычислить Z-изображение выходного сигнала системы (рис. 16), если
![]()
Отличие
этой дискретной системы САУ от системы,
структура которой приведена на рис. 13,
в наличии непрерывного звена
![]() перед квантователем.
перед квантователем.
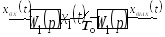
Рис.16. Структура дискретной САУ (пример 12)
Искомое Z-изображение равно:
![]() ,
,
где
 а
а
![]()
![]() .
.
Следовательно:
 .
.
Особенностью рассматриваемой системы является то, что для нее невозможно определить дискретную передаточную функцию как отношение Z-изображений выходного сигнала к входному.
2.5. Передаточная функция замкнутой дискретной системы.
Рассмотрим несколько дискретных систем, структурные схемы которых отличаются друг от друга расположением квантователя. Как будет показано ниже, это различие определяет не только вид передаточной функции, но и возможность ее определения.
Система с квантованием сигнала ошибки (рис. 17).
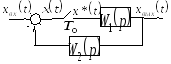
Рис.17. Структура замкнутой дискретной САУ
с квантованием сигнала ошибки
Система описывается следующим уравнением в Z-изображениях:
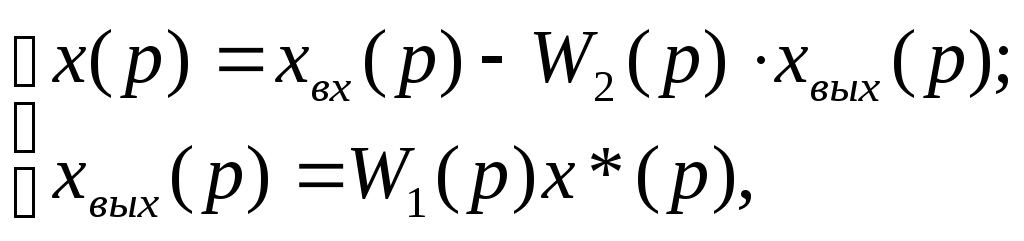 (20)
(20)
Откуда
![]() .
.
Далее необходимо выполнить над обеими частями последнего равенства. При этом необходимо учитывать, что такое преобразование от произведения импульсной функции (помеченной символом *) и непрерывной функции равно произведению Z-изображений, соответствующих этим функциям.
Следовательно,
![]() и
и
![]() .
.
Выполнив
Z-преобразование второго
уравнения приведенной выше системы,
получим
![]() .
.
Z-изображение выходного сигнала:
![]()
а передаточная функция замкнутой системы:
![]() (21)
(21)
Система с импульсным элементом на выходе (рис. 18).
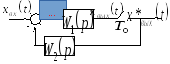
Рис.18. Структура замкнутой дискретной САУ
с квантованием выходного сигнала
Дискретная система с импульсным элементом на выходе описывается следующими уравнениями:
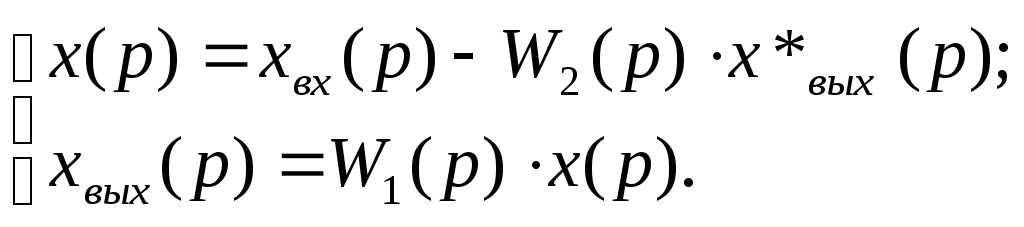
Подставляя первое из приведенных уравнений во второе, получим:
![]()
Z-преобразование последнего выражения дает
![]()
откуда
![]() .
.
В отличие от предыдущей, в данной системе невозможно определить передаточную функцию в виде
![]() .
.
Система с квантованием выходного сигнала и сигнала ошибки (рис. 19).
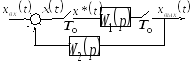
Рис.19. Структура замкнутой дискретной САУ
с квантованием выходного сигнала и сигнала ошибки
Преобразование Лапласа для сигнала ошибки и выходного сигнала:
![]() .
.
Z-преобразование над приведенными уравнениями дает:
![]()
Z-изображение выходного сигнала:
![]()
Следовательно:
![]()
а передаточная функция замкнутой системы:
![]() .
.
Пример 13. Для системы, структура которой приведена на рис. 20, необходимо определить передаточную функцию замкнутой САУ и передаточную функцию по ошибке.
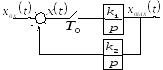
Рис.20. Структура дискретной САУ к примеру 13
Для замкнутой
дискретной САУ с квантованием сигнала
ошибки дискретная передаточная функция
![]() и передаточная функция по ошибке могут
быть найдены по следующим формулам:
и передаточная функция по ошибке могут
быть найдены по следующим формулам: