Файл: Контрольные работы. Теория автоматического управления.docx
ВУЗ: Пермский национальный исследовательский политехнический университет
Категория: Методичка
Дисциплина: Теория автоматического управления
Добавлен: 19.10.2018
Просмотров: 5330
Скачиваний: 88
схема которой приведена на рис. 1, а исходные данные для 13-го
варианта – в табл. 1.
4. Настройте параметры ПИД – регулятора по методу CHR системы,
состоящей из функционально необходимых элементов. Структурная
схема системы приведена на рис. 3, исходные данные для третьего
варианта – в табл. 5.
5. Реализация цифровых регуляторов методом прямого программирования
по варианту 13 таблицы 3.
Вариант №14
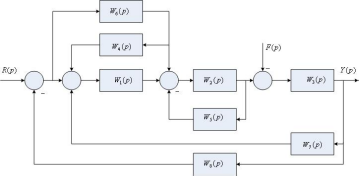
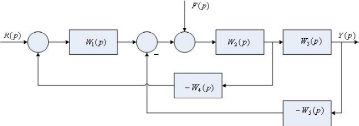
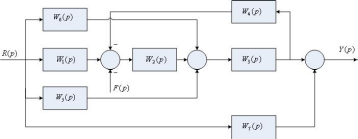
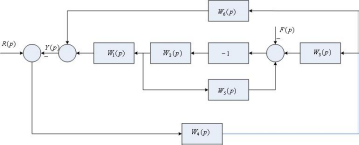
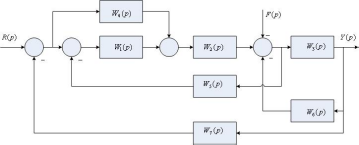
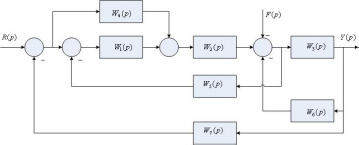
1. Определите передаточную функцию по каналу возмущения
 следующей
алгоритмической структуры САУ:
следующей
алгоритмической структуры САУ:
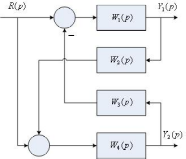
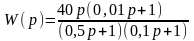
2. Постройте ЛЧХ звена, передаточная функция которого имеет вид
 .
.
3. Проведите анализ устойчивости по критерию Гурвица системы,
состоящей из функционально необходимых элементов, структурная
схема которой приведена на рис. 1, а исходные данные для 14-го
варианта – в табл. 1.
4. Настройте параметры регулятора по критерию модульного
(технического) оптимума системы, состоящей из функционально
необходимых элементов. Структурная схема системы приведена на
рис. 4, исходные данные для третьего варианта – в табл. 6.
5. Реализация цифровых регуляторов методом последовательного
программирования по варианту 14 таблицы 3.
Вариант №15
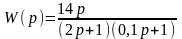
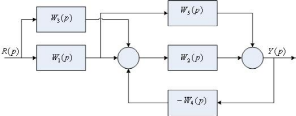
1. Определите передаточные функции по каналу управления для двух
выходов
системы
 и
и
 следующей
алгоритмической структуры
следующей
алгоритмической структуры
САУ:
2. Постройте ЛЧХ звена, передаточная функция которого имеет вид
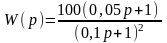 .
.
3. Проведите анализ устойчивости по критерию Гурвица системы,
состоящей из функционально необходимых элементов, структурная
схема которой приведена на рис. 1, а исходные данные для 15-го
варианта – в табл. 1.
4. Настройте параметры регулятора системы с апериодической реакцией,
состоящей из функционально необходимых элементов. Структурная
схема системы приведена на рис. 5, исходные данные для третьего
варианта – в табл. 7.
5. Реализация цифровых регуляторов методом параллельного
программирования по варианту 15 таблицы 3.
Вариант №16
1. Определите передаточную функцию по каналу управления
 следующей
алгоритмической структуры САУ:
следующей
алгоритмической структуры САУ:
2. Постройте ЛЧХ звена, передаточная функция которого имеет вид
 .
.
3. Проведите анализ устойчивости по критерию Гурвица системы,
состоящей из функционально необходимых элементов, структурная
схема которой приведена на рис. 1, а исходные данные для 16-го
варианта – в табл. 1.
4. Настройте параметры ПИД – регулятора по временному
модифицированному методу Зиглера – Никольса системы, состоящей
из функционально необходимых элементов. Структурная схема
системы приведена на рис. 2, исходные данные для четвёртого
варианта – в табл. 2.
5. Реализация цифровых регуляторов методом прямого программирования
по варианту 16 таблицы 3.
Вариант №17
1. Определите передаточную функцию по каналу возмущения
 следующей
алгоритмической структуры САУ:
следующей
алгоритмической структуры САУ:
2. Постройте ЛЧХ звена, передаточная функция которого имеет вид
 .
.
3. Проведите анализ устойчивости по критерию Гурвица системы,
состоящей из функционально необходимых элементов, структурная
схема которой приведена на рис. 1, а исходные данные для 17-го
варианта – в табл. 1.
4. Настройте параметры ПИД – регулятора по частотному методу
Зиглера – Никольса системы, состоящей из функционально
необходимых элементов. Структурная схема системы приведена на
рис. 2, исходные данные для четвёртого варианта – в табл. 4.
5. Реализация цифровых регуляторов методом последовательного
программирования по варианту 17 таблицы 3.
Вариант №18
1. Определите передаточную функцию по каналу управления
следующей
алгоритмической структуры САУ:
2. Постройте ЛЧХ звена, передаточная функция которого имеет вид
 .
.
3. Проведите анализ устойчивости по критерию Гурвица системы,
состоящей из функционально необходимых элементов, структурная
схема которой приведена на рис. 1, а исходные данные для 18-го
варианта – в табл. 1.
4. Настройте параметры ПИД – регулятора по методу CHR системы,
состоящей из функционально необходимых элементов. Структурная
схема системы приведена на рис. 3, исходные данные для четвёртого
варианта – в табл. 5.
5. Реализация цифровых регуляторов методом параллельного
программирования по варианту 18 таблицы 3.
Вариант №19
1. Определите передаточную функцию по каналу управления
 следующей
алгоритмической структуры САУ:
следующей
алгоритмической структуры САУ:
2. Постройте ЛЧХ звена, передаточная функция которого имеет вид
 .
.
3. Проведите анализ устойчивости по критерию Гурвица системы,
состоящей из функционально необходимых элементов, структурная схема
которой приведена на рис. 1, а исходные данные для 19-го варианта –
в табл. 1.
4. Настройте параметры регулятора по критерию модульного
(технического) оптимума системы, состоящей из функционально
необходимых элементов. Структурная схема системы приведена на
рис. 4, исходные данные для четвёртого варианта – в табл. 6.
5. Реализация цифровых регуляторов методом прямого программирования
по варианту 19 таблицы 3.
Вариант №20
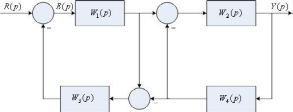
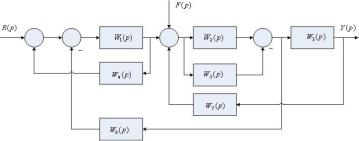
1. Определите передаточную функцию по рассогласованию
 следующей
алгоритмической структуры САУ:
следующей
алгоритмической структуры САУ:
2. Постройте ЛЧХ звена, передаточная функция которого имеет вид
 .
.
3. Проведите анализ устойчивости по критерию Гурвица системы,
состоящей из функционально необходимых элементов, структурная
схема которой приведена на рис. 1, а исходные данные для 20-го
варианта – в табл. 1.
4. Настройте параметры регулятора системы с апериодической реакцией,
состоящей из функционально необходимых элементов. Структурная
схема системы приведена на рис. 5, исходные данные для четвёртого
варианта – в табл. 7.
5. Реализация цифровых регуляторов методом последовательного
программирования по варианту 20 таблицы 3.
Вариант №21
1. Определите передаточную функцию по каналу управления
следующей
алгоритмической структуры САУ:
2. Постройте ЛЧХ звена, передаточная функция которого имеет вид
 .
.
3. Проведите анализ устойчивости по критерию Гурвица системы,
состоящей из функционально необходимых элементов, структурная
схема которой приведена на рис. 1, а исходные данные для 1-го варианта
– в табл. 1.
4. Настройте параметры ПИД – регулятора по временному
модифицированному методу Зиглера – Никольса системы, состоящей
из функционально необходимых элементов. Структурная схема
системы приведена на рис. 2, исходные данные для пятого варианта –
в табл. 2.
5. Реализация цифровых регуляторов методом параллельного
программирования по варианту 21 таблицы 3.
Вариант №22
1. Определите передаточную функцию по каналу возмущения
 следующей
алгоритмической структуры САУ:
следующей
алгоритмической структуры САУ:
2. Постройте ЛЧХ звена, передаточная функция которого имеет вид
 .
.
3. Проведите анализ устойчивости по критерию Гурвица системы,
состоящей из функционально необходимых элементов, структурная
схема которой приведена на рис. 1, а исходные данные для 2-го варианта
– в табл. 1.
4. Настройте параметры ПИД – регулятора по частотному методу Зиглера
– Никольса системы, состоящей из функционально необходимых
элементов. Структурная схема системы приведена на рис. 2, исходные
данные для пятого варианта – в табл. 4.
5. Реализация цифровых регуляторов методом прямого программирования
по варианту 22 таблицы 3.
Вариант №23
1. Определите передаточную функцию по каналу управления
 следующей
алгоритмической структуры САУ:
следующей
алгоритмической структуры САУ:
2. Постройте ЛЧХ звена, передаточная функция которого имеет вид
 .
.
3. Проведите анализ устойчивости по критерию Гурвица системы,
состоящей из функционально необходимых элементов, структурная
схема которой приведена на рис. 1, а исходные данные для 3-го варианта
– в табл. 1.
4. Настройте параметры ПИД – регулятора по методу CHR системы,
состоящей из функционально необходимых элементов. Структурная
схема системы приведена на рис. 3, исходные данные для пятого
варианта – в табл. 5.
5. Реализация цифровых регуляторов методом последовательного
программирования по варианту 23 таблицы 3.
Вариант №24
1. Определите передаточную функцию по каналу возмущения
 следующей
алгоритмической структуры САУ:
следующей
алгоритмической структуры САУ:
2. Постройте ЛЧХ звена, передаточная функция которого имеет вид
 .
.
3. Проведите анализ устойчивости по критерию Гурвица системы,
состоящей из функционально необходимых элементов, структурная схема
которой приведена на рис. 1, а исходные данные для 4-го варианта –
в табл. 1.
4. Настройте параметры регулятора по критерию модульного
(технического) оптимума системы, состоящей из функционально
необходимых элементов. Структурная схема системы приведена на
рис. 4, исходные данные для пятого варианта – в табл. 6.
5. Реализация цифровых регуляторов методом параллельного
программирования по варианту 24 таблицы 3.
Вариант №25
1. Определите передаточную функцию по каналу управления
следующей
алгоритмической структуры САУ:
2. Постройте ЛЧХ звена, передаточная функция которого имеет вид
 .
.
3. Проведите анализ устойчивости по критерию Гурвица системы,
состоящей из функционально необходимых элементов, структурная
схема которой приведена на рис. 1, а исходные данные для 5-го варианта
– в табл. 1.
4. Настройте параметры регулятора системы с апериодической реакцией,
состоящей из функционально необходимых элементов. Структурная
схема системы приведена на рис. 5, исходные данные для пятого
варианта – в табл. 7.
5. Реализация цифровых регуляторов методом прямого программирования
по варианту 25 таблицы 3.
Вариант №26
1. Определите передаточную функцию по каналу возмущения
 следующей
алгоритмической структуры САУ:
следующей
алгоритмической структуры САУ:
2. Постройте ЛЧХ звена, передаточная функция которого имеет вид
 .
.
3. Проведите анализ устойчивости по критерию Гурвица системы,
состоящей из функционально необходимых элементов, структурная
схема которой приведена на рис. 1, а исходные данные для 5-го варианта
– в табл. 1.
4. Настройте параметры ПИД – регулятора по временному
модифицированному методу Зиглера – Никольса системы, состоящей
из функционально необходимых элементов. Структурная схема
системы приведена на рис. 2, исходные данные для шестого варианта –
в табл. 2.
5. Реализация цифровых регуляторов методом последовательного
программирования по варианту 26 таблицы 3.
Вариант №27
1. Определите передаточную функцию по каналу управления
 следующей
алгоритмической структуры САУ:
следующей
алгоритмической структуры САУ:
2. Постройте ЛЧХ звена, передаточная функция которого имеет вид
.
3. Проведите анализ устойчивости по критерию Гурвица системы,
состоящей из функционально необходимых элементов, структурная
схема которой приведена на рис. 1, а исходные данные для 5-го варианта
– в табл. 1.
4. Настройте параметры ПИД – регулятора по частотному методу
Зиглера – Никольса системы, состоящей из функционально необходимых
элементов. Структурная схема системы приведена на рис. 2, исходные
данные для шестого варианта – в табл. 4.
5. Реализация цифровых регуляторов методом параллельного
программирования по варианту 27 таблицы 3.
Вариант №28
1. Определите передаточную функцию по каналу возмущения
следующей
алгоритмической структуры САУ:
2. Постройте ЛЧХ звена, передаточная функция которого имеет вид
.
3. Проведите анализ устойчивости по критерию Гурвица системы,
состоящей из функционально необходимых элементов, структурная
схема которой приведена на рис. 1, а исходные данные для 5-го варианта
– в табл. 1.
4. Настройте параметры ПИД – регулятора по методу CHR системы,
состоящей из функционально необходимых элементов. Структурная схема
системы приведена на рис. 3, исходные данные для шестого варианта –
в табл. 5.
5. Реализация цифровых регуляторов методом прямого программирования
по варианту 28 таблицы 3.
Вариант №29
1. Определите передаточную функцию по каналу управления
следующей
алгоритмической структуры САУ:
2. Постройте ЛЧХ звена, передаточная функция которого имеет вид
.
3. Проведите анализ устойчивости по критерию Гурвица системы,
состоящей из функционально необходимых элементов, структурная
схема которой приведена на рис. 1, а исходные данные для 5-го варианта
– в табл. 1.
4. Настройте параметры регулятора по критерию модульного (технического)
оптимума системы, состоящей из функционально необходимых элементов.
Структурная схема системы приведена на рис. 4, исходные данные для